无人机倾斜摄影测量技术在垦造水田项目中的应用
2022-12-17符利
符 利
(广东水电二局股份有限公司,广州 511340)
1 概述
为了加强耕地保护和改进占补平衡,坚决遏制耕地“非农化”、防止耕地“非粮化”,加强国土空间规划管控,严格控制新增建设占用耕地,引导各地不占或少占水田等优质耕地,在省内开展了垦造水田项目建设。垦造水田项目涉及范围广、工期紧、精度高,在建设过程中需要是三维实景模型、数字线划图、正射影像图、坡度分级图等多种成果,以满足不同阶段的项目建设工作需求。而传统的测量方式存在投入大,效率低,测绘成果单一的问题,无法满足项目建设在不同阶段的需要。
无人机倾斜摄影测量技术是运用无人机航摄仪野外一次性飞行航拍,获取项目范围内的多个角度的高质量影像数据,通过影像数据处理软件建立高精度、高分辨率的三维实景模型,输出数字线划图、正射影像图及坡度分级图等。
2 飞马D2000无人机倾斜摄影测量系统简介
本项目选用的是深圳飞马公司D2000无人机摄影测量系统(见图1,表1),是一款小型、长续航同时能满足高精度测绘遥感的多旋翼无人机系统。该款无人机飞行平台搭载D-OP3000倾斜摄影测量模块(见表2),可安全、稳定、高效地完成项目区域内航拍片的获取工作。

图1 飞马D2000飞行平台搭载D-OP3000倾斜摄影测量系统示意

表1 飞马D2000无人机飞行平台系统参数

表2 D-OP3000摄影测量模块
3 无人机倾斜摄影测量技术的优势
3.1 无人机倾斜摄影测量的特点
1) 低空灵活。无人机飞行高度在100~1 000 m范围内,受空气云层和高空管制的影响比较小,如有特殊情况发生,航摄仪也可以及时降落,同时在测量前,可以根据项目范围内卫星影像,对飞行方案进行调整,提前避开障碍危险物。
2) 周期短效率高。无人机倾斜摄影测量分内业和外业,外业工作内容前期为像控点布设及测量和野外航拍,后期为补充调绘,大大缩减了人工成本,缩短了野外作业时间;内业根据项目大小,影像数据的数量,合理调配计算机服务器和内业人员数量,利用Smart3D Capture Context、EPS、PIX-4D mapper等数据处理软件对航拍影像和像控数据进行数据处理,输出各项测绘成果[1]。
3) 成果多元化、精度高[2-3]。无人机倾斜摄影测量通过低空多角度航拍获取地面多角度高分辨率影像,处理生成三维实景模型、数字线划图、正射影像图、坡度分级图等成果,图形精度可达到1∶500比例尺地形图要求,影像分辨率可以达到3 cm,完全满足项目建设的需要。
4) 适用性强。无人机倾斜摄影测量外业航拍是在空中作业,与GPS野外测图相比,不会出现因卫星遮挡无法定位的情况,同时空中航拍可以获取更全面完整的数据,成果更加真实的反映出项目区域内的地形地貌。
3.2 无人机倾斜摄影测量技术应用流程
本研究选用的是飞马D2000无人机搭载D-OP3000倾斜摄影测量模块,其主要工作和技术流程见图2。

图2 飞马无人机倾斜摄影测量技术应用流程示意
4 基于飞马.2000无人机倾斜摄影测量技术在垦造水田中的应用实例
4.1 测区概况
2019年度肇庆市怀集县冷坑(等3个)镇垦造水田项目是广东省垦造水田项目之一,位于肇庆市怀集县冷坑镇水口村,测区南北长约为1 000 m,东西宽约为1 100 m,成三角形状,最高海拔为101.7 m,最低海拔为72.3 m,平均高程为87 m,面积约为56.13 hm2。项目的地形地貌主要以地山丘陵及谷间平地为主,地表植被多为荒地和桉树,分布有少量鱼塘。
4.2 无人机航测飞行方案的设计
本项目航线规划是在飞马无人家管家制作,以天地图为设计底图,选用飞马D2000飞行器搭载D-OP3000倾斜摄影测量系统进行航线规划(见图3),分别设置航线重叠度为80%,旁向重叠度75%,综合考虑成图比例尺(1∶500)和航摄仪的基本参数,依据《低空数字航空摄影测量外业规范》(CH/Z3004-2010),设定了2.8 cm地面分辨率(GSD),同时确定了相对飞行高度为180 m,为了保证航拍质量,航线设计在覆盖红线范围的前提下,在航向上外扩180 m,在旁向上外扩两条航线,整个飞行任务覆盖面积为0.531 km2,预计飞行时间37 min,共计1个架次(见图4)。

图3 航线规划示意
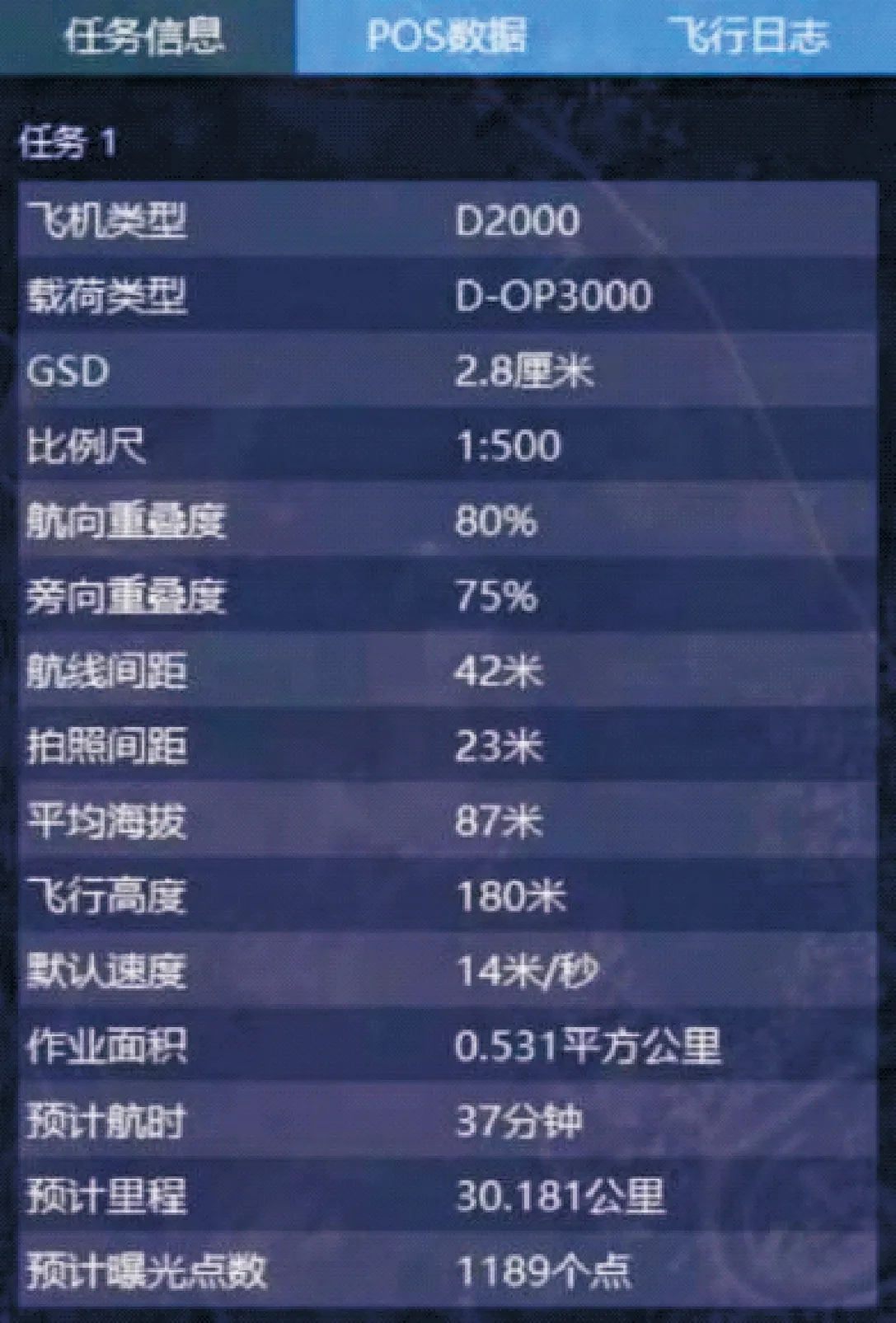
图4 飞行任务详情示意
4.3 像控点的布设与获取
依据《低空数字航空摄影测量外业规范》(CH/Z 3004—2010)进行像控点布设。采取先内后外的布设方式,先在天地图影像上,初步确定像控点的位置,像控点分布必须覆盖整个项目范围,相邻像控点之间的距离控制在600~800 m范围内,特殊情况下可以适当放宽一定距离,同时像控点应尽量选取特征地物或者突出目标,布设标志应该拥有较好的对空视角,不得被树木或建筑物遮挡,像控标志须与背景形成较为明显的色彩对比,标志形状必须有明显的角点,以作为像控点坐标采集点,以保证在内业刺点的精度[4-5]。本项目的像控点布设依据规范要求,结合现场实际情况,选取了“L”形像控标志进行布设,共在测区范围内均匀布设了7个像控点,3个检查点(见图5),并采用GD-CORS网络RTK方法测量获取像控点、检查点的外角坐标(见图6)。

图5 像控点分布示意

图6 像控点测量示意
4.4 影像数据获取
该项目航拍利用飞马无人机管家智飞行功能模块对航拍过程进行全程实时监控,可实时可视化显示飞行轨迹、飞机状态、风速地速、电池状态、机身温度以及GPS定位状态,本项目实际航拍时长40 min,飞行里程共计32 km,五个航拍镜头共获取航拍片5 970张。
4.5 无人机倾斜摄影测量成果生成及应用
1) 三维实景模型的生成及应用
将外业获取的五视影像图和POS数据导入自动建模软件中进行影像匹配,再加入目标坐标系下的地面控制点进行影像关联完成空三解算,最后通过软件全自动构建三维实景模型,模型多角度反映出了测区范围内的地形走势、道路交通、河流分布和房屋村落的情况[6-8](见图7)。

图7 垦造水田项目中的三维实景模型示意
三维实景模型位为项目建设初期设计人员和现场勘查人员开展工作提供了重要资料,它完整反映了建设项目内的真实情况,项目参建人员可以通过三维实景模型反映出来植被、道路、水沟、鱼塘等信息进行项目详细选址和进场道路规划。
2) 数字线划图(DLG)的生成及应用
利用清华山维三维测图软件(EPS)对三维实景模型直接加载转换生成DSM实景表面模型,通过裸眼测图的方式,在加载好的表面模型上进行各种线划图要素的提取[9],结合现场调绘、补测后,对数字线划图进行整饰和数据检查,合格后输出符合设计规范要求数字线画图(见图8)。
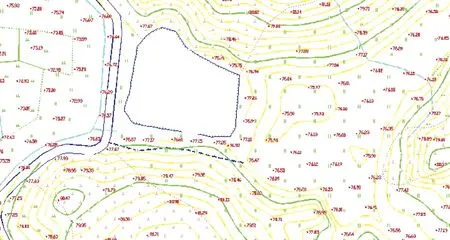
图8 垦造水田项目中的数字线划示意
为设计人员开展设计工作提供保障,设计人员以数字线划图为底图进行项目的详细设计与规划,根据数字线划图内提供的地形地貌信息,详细的规划出新的田块、机耕路、灌溉渠、蓄水池等项目建设信息。
3) 正射影像图(DOM)的生成及应用
将该项目的正射航拍片和对应的POS数据导入PIX-4D mapper软件新建项目中,在完成相控点关联后,选择在目标坐标系下全自动处理,自动处理过程中,无需人工干预,全自动生成高精度点云、纹理和正射影像图[10](见图9)。

图9 垦造水田项目正射影像示意
通过正射影像图与数字线划图的叠加分析,相关参建人员可以了解到项目建设实际情况,是否存在不符合设计规划的情况。建设完成的项目则可以通过正射影像图制作出反映新建水田的种植情况的专题地图。
4) 坡度分级图的生成及应用
坡度分级图是反映地形的重要因子,是描述地形的常用参数。在ArcGIS软件下,对DEM数据进行坐标系、完整性等检查和转换,然后按照项目范围红线进行DEM拼接和坡度计算,并按照规定的坡度分级标准进行坡度分级,在坡度分级的基础上,生成坡度分级图[11-13](见图10)。
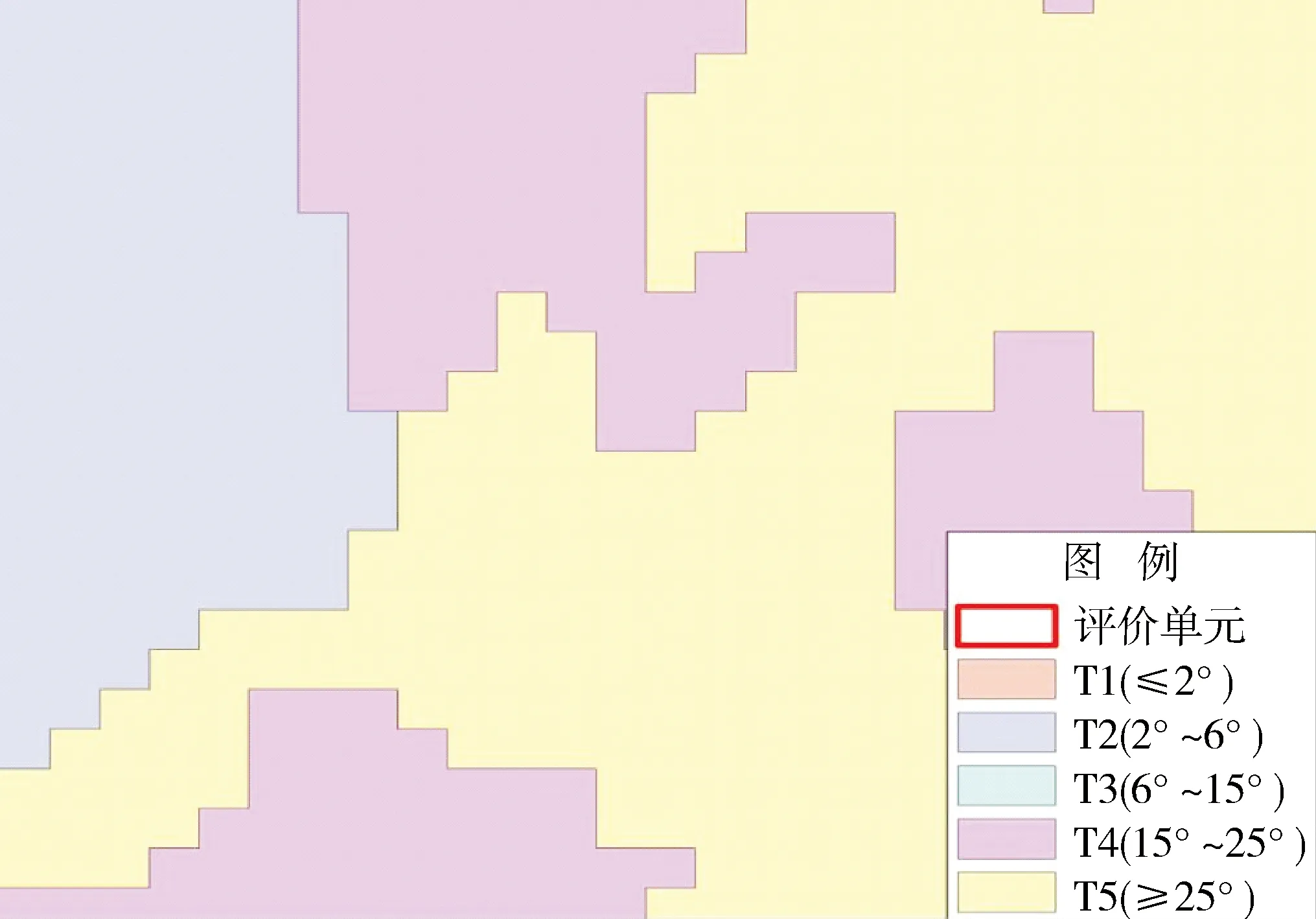
图10 坡度分级示意
垦造水田项目建设对耕地坡度有着严格的要求,对于坡度超过25°地区,严禁进行垦造水田建设,设计人员在前期可以通过坡度分级图,合理规避剔除不符合坡度过于陡峭的区域,项目建设完成后,通过坡度分级图检查项目建设是否符合坡度设计要求。
5 结语
无人机倾斜摄影测量技术打破了传统测量手段的局限性,极大减少了外业工作量的同时更加提高了内业数据处理的自动化和人工干预,基于无人机倾斜摄影测量技术在垦造水田项目中的应用,更是满足项目建设工期紧、精度高、阶段多,测量成果需求种类多的要求,“一飞多用”的作业特点,通过一次外业航拍飞行,为垦造水田项目建设提供了三维实景影像、数字线划图、正射影像图、坡度分级图多种测绘成果,满足了项目建设在不同阶段时期对测绘成果的不同需要,对广东省垦造水田项目建设提供了坚实的测绘保障。
