两井间贯通误差预计及软件开发★
2022-12-16李付岗胡永峰
李付岗,胡永峰
(1.冀中能源峰峰集团梧桐庄矿,河北 邯郸 056200;2.中国矿业大学环境与测绘学院,江苏 徐州 221116)
目前在绿色矿山与城市地下轨道建设过程中高效精确完成巷道贯通工作具有重要意义。两井间贯通误差预计需考虑地面导线测量、联系测量、井下导线测量和高程测量等误差预计,人工进行该工作烦琐复杂且容易出错,因此利用编程语言快速准确实现贯通误差预计是非常必要的。本文基于MATLAB平台开发了一款两井间巷道贯通误差预计软件[1],软件系统运行稳定,可快速准确得到贯通误差预计结果[2]。
1 贯通误差预计原理
1.1 水平方向上的误差预计原理
1)地面测量误差对贯通点K的影响。
a.采用导线测量的误差估算公式:
(1)
b.采用GPS测量时的误差预计公式:
(2)

2)定向测量对贯通点K的影响:
(3)
(4)
其中,mα0为一井定向误差;Ry′0风,Ry′0主分别为主井与风井定向时井下导线投影长。
3)井下测角对点K的影响:
(5)
4)井下量边对点K的影响:
a.采用钢尺量边的误差估算公式:
(6)
b.采用光电测距的误差估算公式:
(7)
其中,l为井下布设导线边长;α′为各导线与x′方向之间的夹角;ml为光电测距的量边误差,ml=±(A+Bl)。
5)贯通在K点的预计误差:
(8)
(9)
1.2 竖直方向上的误差预计原理
1)地面水准测量误差对贯通点K的影响:
a.误差估算公式一:
(10)
其中,m0为地面水准测量水准尺读数中误差;n为地面水准测量设站数。
b.误差估算公式二:
(11)
其中,mhL为每千米水准测量高差中误差;L为地面水准控制测量路线全长。
2)导入高程误差对贯通点K的影响:
(12)
其中,h为导入高程的井深。
3)井下水准测量误差对贯通点K的影响:
a.水平巷道水准测量误差估算公式:
(13)
其中,R为井下水平巷道水准测量线路总长;mhL1为井下每千米水准测量的高差中误差,依据《煤矿测量规程》为±17.7 mm/km。
b.倾斜巷道三角高程测量误差估算公式:
(14)
其中,L为井下倾斜巷道三角高程测量线路全长;mhL2为井下每千米三角高程测量高差中误差,依据《煤矿测量规程》为±50 mm/km。
4)贯通点K高程预计误差:
贯通高程总误差为:
(15)
贯通点K的高程预计误差为:
(16)
2 程序设计实现
2.1 水平方向误差程序设计实现
2.1.1 导线点点号的编码规则
两井贯通测量误差预计中地面导线测量与地下导线测量使用仪器不同[3-4],需要进行区分;在平巷与斜巷中高程测量使用的仪器可能不同,需要进行区分;在重要巷道要加测陀螺边提高贯通测量精度,因此也需要区分定向点与非定向点。
导线点点号的编码规则:
1)地面导线点直接采用正整数1,2,3,4…依次进行编码。
2)井口近井点采用负整数编号。误差预计时只需要对联系测量的两个近井点进行编号,即-1,-2。
3)井下导线点编号采用四位正整数,用符号“fhdd”表示。
a.符号f用于区分定向点与非定向点,取值为1或2。1为定向点;2为非定向点。
b.符号h为平巷与斜巷的区分标志,取值为0和1。1为斜巷中的点;0为平巷中的点。
c.符号dd为每个井下导线点的区分标志。
d.贯通点K直接由程序给定出。
2.1.2 两井贯通误差预计数据获取
1)在AutoCAD软件中根据两井贯通测量任务书以及《矿山测量规范》设计导线网。
2)将设计的导线网数据导出为(*.xls)数据格式文件。
3)在MATLAB软件中编程直接提取数据。
2.1.3 两井道贯通算法设计
1)井下测角误差引起待贯通点误差预计的方法[5]:
a.井下导线起始点至贯通相遇点K未加入陀螺定向时未加测陀螺定向,按支导线误差预计公式进行程序编写。
b.井下导线两端均为陀螺定向边,该段导线为方向附和导线,记录该段导线重心的y坐标,并按附和导线误差预计公式进行程序编写。
c.导线一端为陀螺定向边,记录该段导线终端点与该段导线各点的y坐标,并按附和导线误差预计公式进行程序编写。
2)地面误差引起待贯通点误差预计的方法:
a.目前地面联系测量两近井点之间通视时,布设D级或E级GPS静态网足以满足两井贯通测量精度需求,选用GPS测量时的误差预计公式进行程序编写。
b.两近井点不通视线时,选用导线测量的误差估算公式进行程序编写。
3)量边误差引起待贯通点误差预计的方法:
井下导线测量对贯通点K引起误差与导线类型无关,根据测量所选的仪器与方法选用相应贯通误差预计公式进行程序编写。
2.2 竖直方向误差程序设计实现
1)水准点号编号规则。
平巷与倾斜巷道对两井贯通测量误差预计影响程度不同需加以区分,分别设计程序编程,具体编码规则为:水准点编号采用四位正整数,用符号“shjj”表示。
a.符号“s”用来区分地面与井下水准点;0为地面水准点,1为井下水准点。
b.符号“h”为平巷与倾斜巷道水准点;0为斜巷水准点,1为平巷水准点。
c.符号“jj”取值1~99,用于区分同一类型水准点。
2)遍历布设的所有水准点。
a.地面水准点根据实际任意选择一种误差估计公式进行编程。
b.平巷中的水准点,采用水平巷道误差估计公式进行程序设计。
c.斜巷中的水准点,采用相应误差预计公式进行程序设计。
3 算例与软件效益分析
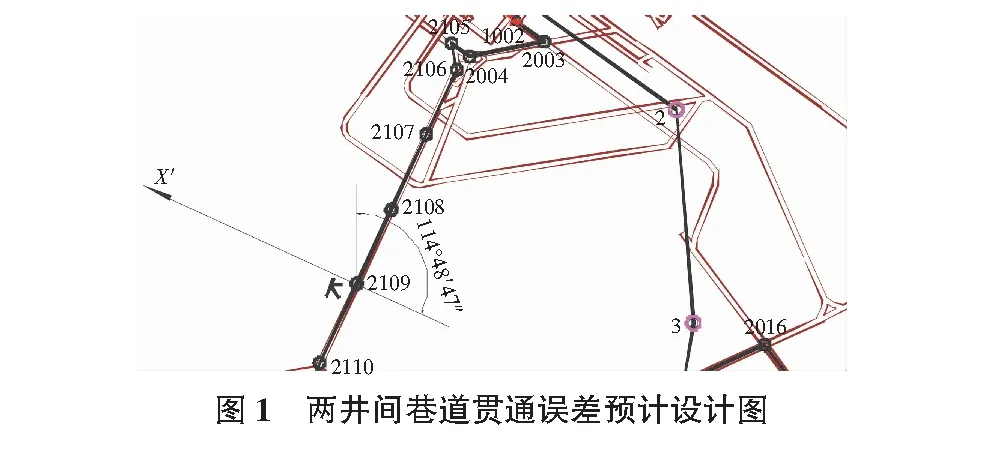
图1为某矿两井间巷道贯通局部示意图[6],点2109为预计贯通点,x′为巷道预计贯通重要方向,其坐标方位角为114°48′47″;共有4个地面导线点、21个井下导线点,近井点1与近井点4之间布设导线全长488 m,导线平均边长为162.6 m;井下导线全长1 122.4 m,平均边长为56.1 m。主、副井深度为292.34 m,风井深度为80.86 m。该两井间巷道的贯通设计了两套可选方案:
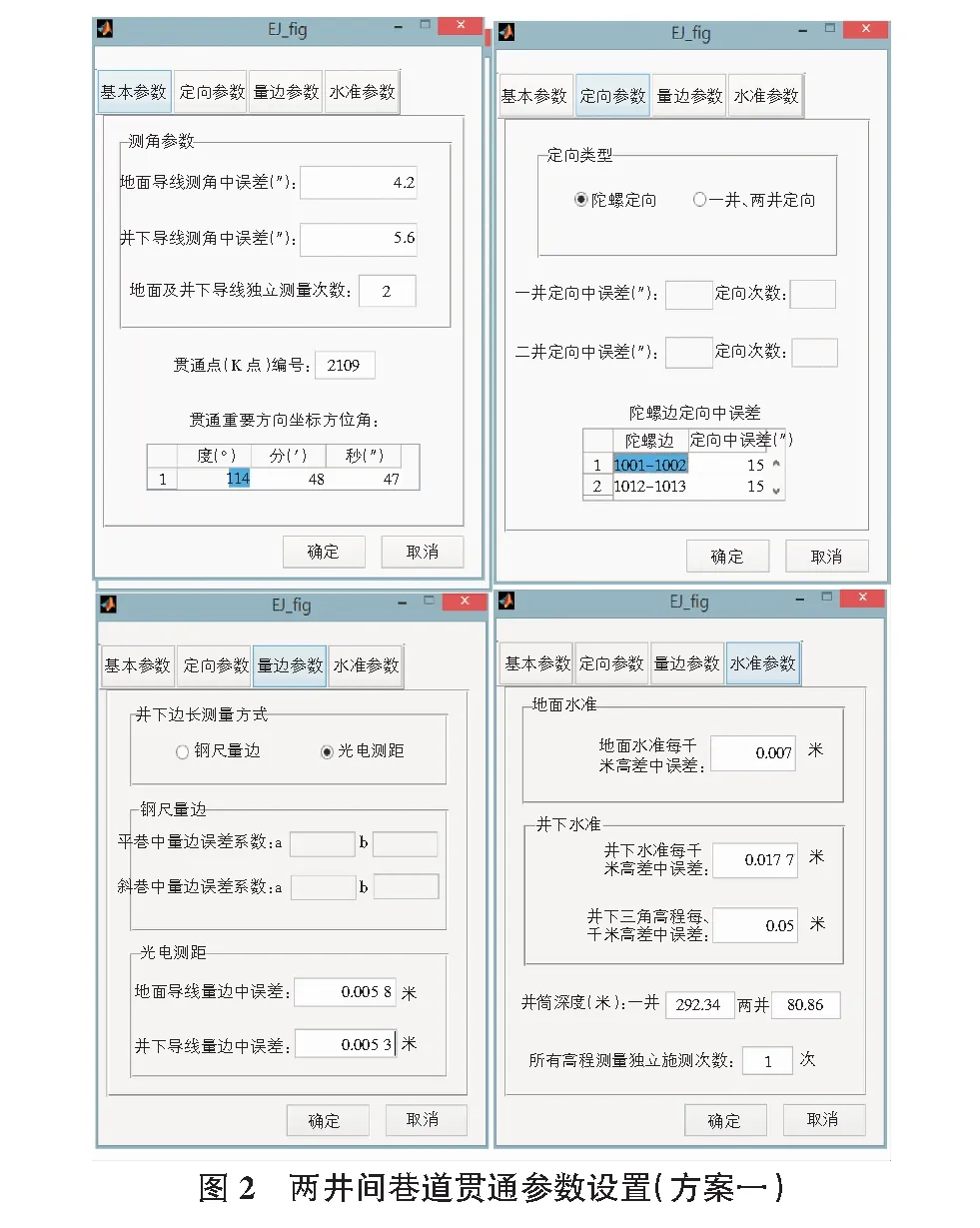
方案一:采用陀螺经纬仪进行定向,量边使用光电测距。
选取1001-1002,1012-1013,1020-1021三条边进行陀螺定向,陀螺定向中误差均为15″。
地面导线测量使用NTS-202全站仪,其测距精度为mD=0.005+5×10-6D,代入地面导线平均边长D=162.6 m,求得地面量边中误差为0.005 8 m。
将井下平均边长56.1 m,求得井下量边中误差为0.005 3 m。
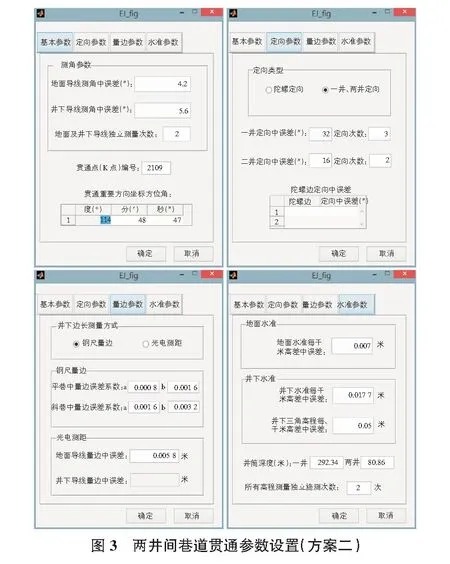
方案二:定向采用一、两井定向方案,量边钢尺量边。主要参数为:
1)根据矿区以往实测资料,两井定向误差为16″,定向2次。
2)一井定向误差为32″,定向3次。
3)钢尺量边偶然误差系数依据《煤矿测量规程》,平巷:0.000 8,斜巷中:0.001 6。
利用软件进行贯通误差预计时,需要设置贯通参数。方案一贯通参数如图2所示,方案二贯通参数如图3所示。
导入布设的导线网数据文件,并在软件中设置好相应贯通参数,双击软件开始界面中的误差预计,可快速计算出贯通预计点K的预计误差。贯通预计误差结果如表1和表2所示。
由表1可以看出,钢尺量边与光电测距量边误差对贯通相遇重要方向x′方向影响较小,且两者相差不大。定向误差对贯通点K预计误差有较大影响,而采用陀螺经纬仪定向后的误差比采用一井、两井定向的预计误差显著降低,定向结果更可靠。表2结果表明导入高程与三角高程测量对贯通点高程影响较大,其次方案二在方案一的基础上增加了一次高程测量的次数,但贯通精度依然满足工程施工的要求,说明在此条件下,只需进行一次高程测量即可[7-8]。
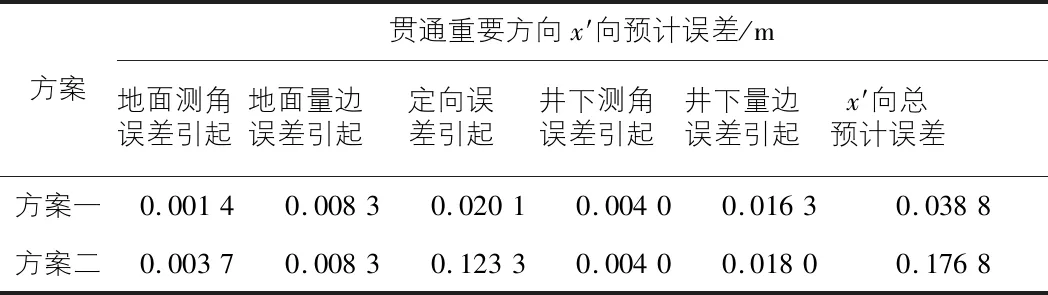
表1 贯通重要方向的预计成果
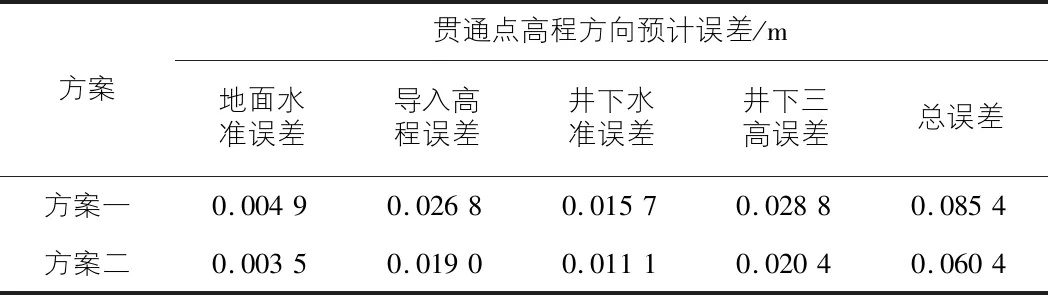
表2 贯通点高程方向的预计成果
由以上理论分析和实例验证发现,基于MATLAB平台开发的两井贯通误差预计软件[9-11],利用了MATLAB强大和稳定的数值计算功能,实现了对大型两井贯通测量重要方向及高程方向误差预计,具备导线网平差的功能,极大改善今后两井贯通测量误差预计的效率与可靠性。
4 结语
本文介绍了两井间贯通误差预计的基本原理,详细阐述了巷道贯通时主要测量误差对贯通相遇点K的影响与软件设计的思路及实现其功能的具体过程。并通过具体矿山实例数据对软件可靠性与准确性进行了验证,实验结果表明该软件可有效提高两井贯通误差预计工作效率,确保工程建设的高效性。
