基于脚步诱发结构振动的人员特征身份识别研究
2022-12-14侯兴民张玉洁
侯兴民, 李 冉, 张玉洁
(烟台大学 土木工程学院, 山东 烟台 264005)
身份识别在安全系统中具有重要作用,基于生物特征识别可以提供更高级别的安全识别精度。生物特征主要分为两大类:静态生理特征,比如面部特征、虹膜特征、指纹特征等;行为特征,比如步态特征、语音特征等。步态特征属于人们在行走过程中特有的一种行为特征,相关研究证明每个人的步态特征都是唯一的[1],它不仅与一个人日常行为有联系,还与体重、鞋型和行走地面状况有关。步态特征采集简单,当一个人行走时便可以采集脚步信号,不需要个人主动识别,具有一定隐秘性,同其他生物特征一样还有不可模仿以及无法复制等优点[2]。因此,高精度的生物步态识别在安全与监督以及个人行为识别方面有较大的应用前景。
目前已有一些通过采集人员行走的脚步振动的研究,表1中汇总了相关研究。通过穿戴设备获取振动信号,Bisio等[3]利用智能手机的加速度计信号在老年人和患者中进行活动状态识别。采用SVM、决策树进行分类,并对其识别性能进行了研究。然而,被测试者必须拥有智能手机才能进行监测,这样很大程度限制了被测试者的正常活动;通过振动传感器获取脚步信号方面,Pan等[4]提出了一种室内识别系统,该系统利用振动传感器采集脚步信号并通过引起的地板振动来识别不同的人。该研究仅限于无噪音的室内环境,但通过使用SVM,达到了85%的准确率。Jin等[5]利用振动传感器对车辆、人和动物进行了分类,利用小波变换对信号进行特征提取使识别准确率达到91.7%。Anchal等[6]通过采集脚步振动信号预测了性别,数据集包含4名男性和4名女性测试者的脚步振动信号,并测试使用各种机器学习方法,来提高分类精度,使用线性SVM达到94.56%的识别率;通过话筒获取脚步声信号方面,Hori等[7]提出了一种利用单个脚步信号的音频部分进行身份识别的系统,通过阈值处理自动获取单个脚步信号,提取脚步信号的梅尔频谱特征图作为特征,在样本数据为4人情况下,平均识别率达到98%。Shoji等[8]使用梅尔频率倒谱系数(MFCC)、行走间隔和频谱包络相似性作为特征,采用K-均值聚类算法作为分类工具。张瑞兴等[9]通过分析脚步声信号的时域波形图,提取脚步声的间隔时间和脚步声的持续时间,组成特征向量作为脚步声信号的特征参数,采用k近邻算法测试人数为8人平均识别率达到88%,实现在安静环境下基于脚步声的身份识别。
基于上述分析,目前针对采用振动传感器获取脚步振动信号进行个人身份识别的研究相对较少并且这些研究大都涉及到复杂的机器学习算法。本文直接对获取到的单一脚步振动信号进行时域、频域特征分析,选择出特征参数之间的最优组合,并利用Lib-SVM工具箱计算多名测试者的平均分类准确率,通过设计多组脚步特征参数组合试验,验证了利用人员脚步振动信号,进行人员身份识别的可行性。
1 技术路线
基于脚步诱发结构振动的人员特征身份识别系统技术路线如图1所示。包含4个步骤模块:数据采集、事件检测、特征提取、人员分类。
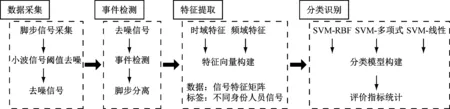
图1 技术路线图
(1) 数据采集模块,在楼地板上布置振动传感器,获取人员走动时引起楼地板振动的脚步信号;之后利用小波阈值去噪技术去除掉信号中的环境噪声。
(2) 事件检测模块,获取到去噪信号后,从一系列振动信号中去除掉非脚步信号,之后检测分离出单一脚步信号用于后续特征分析。
(3) 特征提取模块,对单一脚步振动信号从时域、频域两方面提取多个脚步特征参数,并对每位测试者信息进行标签标注,之后将每位测试者提取到的有效脚步特征参数,叠加组合成特征向量。
(4) 分类方法与评估,一旦特征被提取出来,利用分类工具箱,计算每位测试者的平均分类准确性,并评估不同算法对分类结果的有效性。
2 脚步振动身份特征识别系统
2.1 数据采集
行走时脚与地面碰撞产生振动并发出声音,因此,脚步声可以通过采集行走时产生的振动信号或声音信号获得。相比于脚步声音信号,脚步振动信号更能反映出人员的身份信息,人行走时产生的振动信号频率范围为0~200 Hz[10]。

表1 脚步振动事件识别人员身份方法
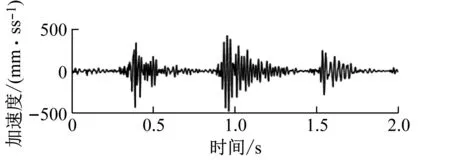
脚步振动信号采集使用941B型拾振器(加速度档位),COINV 智能数据采集仪,以及用于示波显示以及数据存储的笔记本电脑。测试时,为了使传感器与地面接触良好,采用耦合剂将传感器垂直固定在地面上,数据采集设备安放如图2所示;采样频率设置为4 000 Hz,放大倍数选择10倍,测试单位选择加速度;被测人员在距离传感器30 cm左右的位置上进行一段直线距离的往复行走,记录时间为300 s,保证每位测试人员能够记录到200以上个脚步脉冲事件。图3中分别为单人、三人自由行走通过传感器时脚步事件部分时域波形。
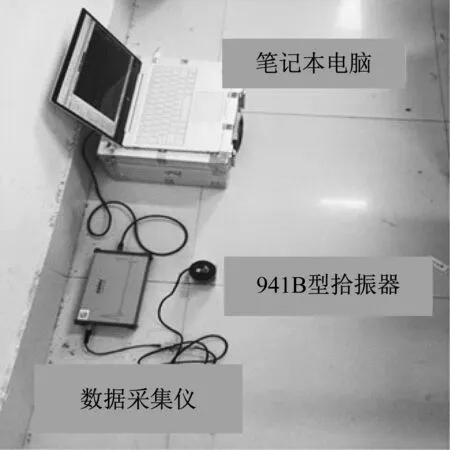
图2 数据采集设备安放
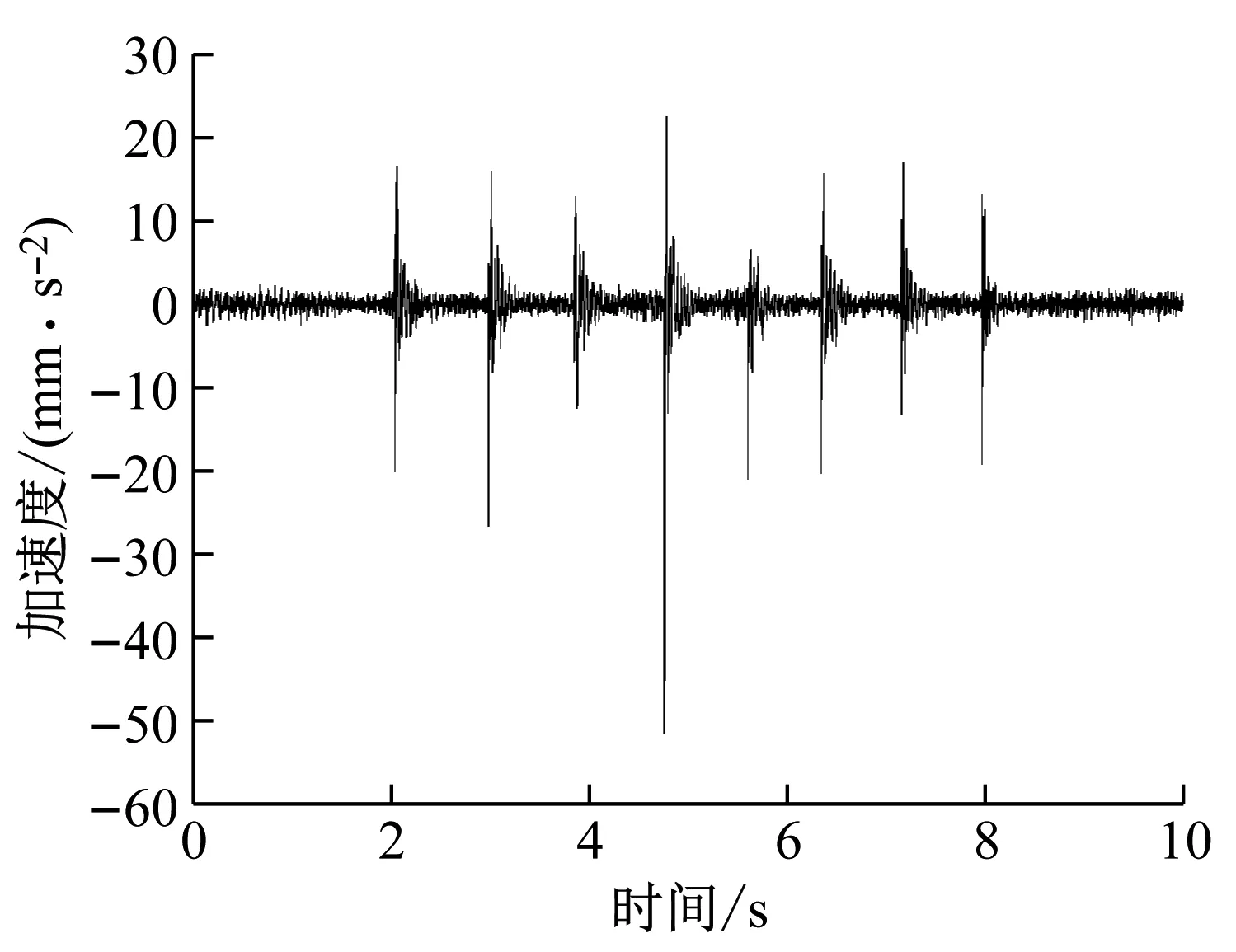
(a) 单人自由行走
图3所示即使在室内安静的环境中,采集的脚步振动信号中也包含有一定的噪声,这些噪声来自于室内背景噪声、采集设备自身噪声、信号传输过程中引入的噪声等。考虑到含有噪声的脚步振动信号会对后期的特征提取、识别等处理带来误差,对含有噪声的脚步振动信号进行小波阈值降噪处理[11]。
小波阈值去噪的基本原理为,去除掉低于阈值的部分,保留高于阈值的部分。图4为采用小波阈值去噪前后信号时域、频域对比图。

(a) 去噪前时域信号
2.2 事件检测
为滤除掉非脚步振动信号,需要从采集的信号中去除环境噪声信息。例如,采集过程中突然的开门声,椅子挪动或其他物体掉落下来产生的振动噪声。这种与脚步振动信号类似的突发性振动脉冲事件,对后续脚步特征的提取和人员身份识别产生不利影响。因此,从采集的信号中获取全部脚步事件是必要的。
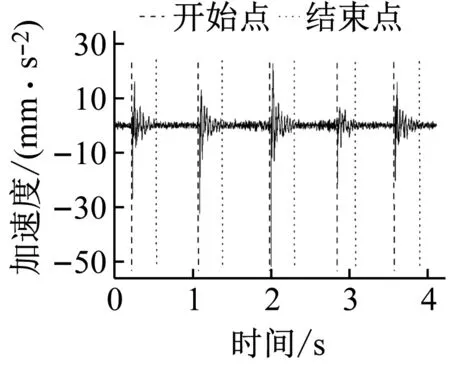
事件检测技术用于检测整个信号中事件(本文为脚步信号)的存在和位置。图5中标记出三个脚步事件。前人的研究中使用基于阈值的技术检测事件,STA/LTA(短时窗平均/长时窗平均)算法[12]和基于峰度事件检测技术[13]以及利用信号的能量进行事件检测[14]。
然而直接将传统的事件识别方法直接应用到脚步事件识中并不能取得理想的识别精度。图3中,单人行走在正常行走状态下,会出现一系列连续的匀速脉冲信号。因为他们的行走速度是一致的,导致引起的脚步振动信号具有一定的周期性。完成一个步行周期,前脚掌跟后脚掌之间的距离通常是固定的。利用这一步行特征,提出采用改进短时能量阈值检测方法。
(a) 脚步时域信号

步骤2设置两个能量阈值能量差阈值el和噪声能量阈值tl,计数点阈值hdt。确定开始点,相邻两帧能量差满足公式(1)中高于能量差阈值时,将前一点作为事件开始点,并进入事件检测阶段。这一过程中一旦短时能量E(s)满足公式(2)中低于能量阈值tl且Cout值达到计数点阈值hdt时,将低于tl时前一点作为事件结束点。

(1)

(2)
式中,Count为能量阈值计数点。
图6为脚步事件的检测结果,(a)为正常行走下脚步振动信号的检测结果,通过该方法成功分离出脚步事件起始位置;(b)、(c)、(d)依次为利用该方法从脚步正常行走周期过程中混入开门声、弹球从1米高度掉落、书本从1米高度掉落三种突发性振动脉冲事件情况下检测出脚步事件,表明从混合信号中获取脚步信号该方法具有很好的适用性。
(a)
2.3 特征选择
特征选取在任何生物识别的过程中都起着至关重要的作用,特征识别的精度取决于特征选择的独特性。通过提取脚步事件在时域和频域方面的相关特征来进行人员识别。图3中,同一位被测者脚步振动信号的幅值随着离传感器距离的增加而减小。这样同一个人在经过传感器时,会产生不一样的脚步事件。为了消除这种距离的影响,Ekimov A等[15]在试验中,要求测试人员在建筑地板上半径为1 m,宽度为0.2 m的圆形轨道内行走。但是,这样不可避免的改变了行人正常行走的姿态。

根据结构动力学原理[16],结构动力响应分析考虑的是输入、输出和结构三个因素之间的关系。这里所谓的结构可理解为传感器布设的楼板,输出则是测点记录的速度时程,而输入指的是引起该速度振动时程产生的外力,即人行荷载。本文研究本质上是一个结构动力学反问题:已知结构和输出,来反演输入的脚步特征,通过速度时程及其频谱提取脚步荷载的特征参数指标,在线性范围内,这些特征参数指标和输入具有唯一的对应关系。
2.3.1 时域指标
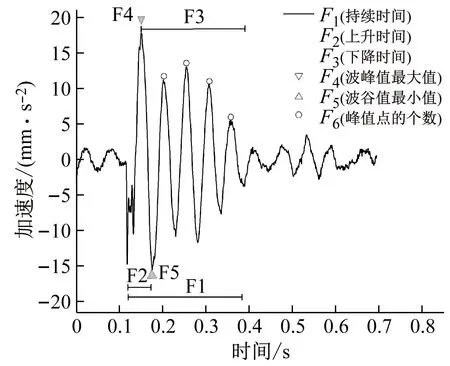
(a) 时域脚步特征参数
2.3.2 频域指标

2.4 分类识别
支持向量机(support vector machine, SVM)由窦希杰等[17]首先提出的一种全新的机器学习方法,适用于小样本分类。支持向量机的思想是建立一个分类超平面作为决策曲面,使得正例与反例之间的隔离边缘被最大化;支持向量机的理论基础是统计学习理论,是结构风险最小化的近似实现。对采集的多人信息进行分类属于多分类问题,目前SVM多分类器方法构造主要是通过组合多个二分类器来实现多分类器的构造,如“一对一”法、“一对多法”、层次支持向量机等。
“一对一”算法(one against one,OAO算法)就是在任意两个样本之间设计一个SVM,n个样本类别就需要设计n(n-1)/2个二分类器,主要包括构建p,q种类的二分类问题,如果样本x属于第p个分类,则q分类的权重增加1;否则,q分类的权重增加1。这样x将属于权重最高的分类。通过提取脚步事件不同方面的特征值组成特征矩阵作为输入样本来训练SVM分类器。并选取分类指标对分类结果进行评价。
3 实测案例分析
3.1 试验设置
脚步振动信号的采集在烟台大学土木馆五楼西侧走廊中完成,走廊长22.5 m,宽1.8 m,地板类型为大理石地板砖,采用脉动法实测楼板竖向自振频率为27.88 Hz,阻尼比为0.29%。传感器位于一侧墙体0.5 m处,选取走廊中间一段长9 m,宽1.8 m的区域进行测试试验,为了排除其他环境噪声因素的干扰,获得更高的信噪比,测试时间选在晚上;测试仪器为941B型拾振器,智能采集仪,采样频率设置为4 000 Hz,传感器放置在离墙面0.5 m的位置。测试时,每位测试者单独在走廊上反复沿直线行走20次,每次行走距离为9 m,每次可采集10~12个脚步振动信号,选择离传感器最近的5个脚步振动信号进行分析。
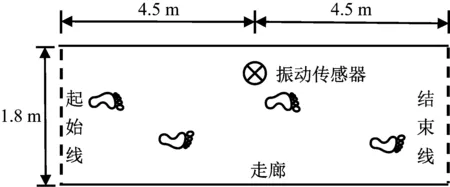
图8 试验测试环境
3.2 试验仿真与分析
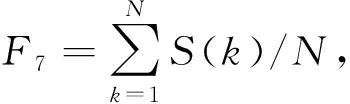
试验采用自建数据库进行训练与分类,每位测试者采集300 s振动信号,利用改进短时能量阈值检测方法,选取出每位测试者有效脚步事件,10名测试者共获取500个有效脚步事件并计算出每位测试者有效脚步事件的16个脚步特征参数值,将不同测试者同一脚步特征参数绘制到同一张图中,横轴均为测试者编号,纵轴为不同脚步特征参数值其单位根据物理意义确定,无量纲单位均用幅值来表示,10位测试者采集到的脚步特征信息如图9所示。

对比不同测试者脚步特征参数发现,相同特征下,同一位测试者计算得到的脚步特征值并不是一个定值,这是由于测得的脚步信号中含有不可避免的环境噪声,但是每个人的脚步特征值均分布在一个离散的特定区间中。比如,波谷值最小值(F5)、峰值点的个数(F6)、均值(F7)、峰值因子(F10)、峭度因子(F11)、前五个峰值点的均值频率(F14)、偏度(F15)、峰度(F16)。同一特征之间,不同测试者之间存在特征数值叠加情况,比如,持续时间(F1)中测试者8、9之间相同特征值个数达到8个,说明仅选用单一脚步特征值并不能作为人员区分的有效特征值。表2中,分别计算出了不同人员之间的脚步特征值的平均值,发现不同人员之间平均脚步特征值之间并不相同,可以将不同脚步特征组合起来,作为人员识别的依据。
3.2.1 试验一
为了获取不同人员数量之间的识别率,本研究选取2.3节中16个脚步特征参数,使用采集到的500个有效脚步事件,来构建特征向量。利用Lib-SVM工具箱RBF核函数进行分类模型训练,并统计训练不同人数时分类模型的平均分类准确率。
由表3可以看出,采用16个脚步特征参数,进行10人分类识别,平均识别率仅达到79.21%。说明选取这些脚步特征参数中有一些并不能为模型分类提供很好的准确性。

表3 SVM模型下不同人数的平均分类准确率
3.2.2 试验二
为了进一步提高10名测试人员下分类准确率,选取最优数据特征,Joes等[18]通过从总特征中选取不同数量特征进行排列组合,选取最优特征组合来对相同样本数目下识别精确度进行提高,最终通过该方法提高了5%的识别率。但是该方法使用的特征选取组合多,分类时间长。本试验中采用皮尔逊相关系数法[19],绘制出不同特征之间的热力图。图10表示选取的16个脚步特征参数进行相关性分析,对两两特征之间,相关系数在0~0.2进行选取,选择出脚步信号的持续时间(F1)、信号下降时间(F3)、波峰值最大值(F4)、波谷值最小值(F5)、稍度(F9)、峰值因子(F10)、峰值点频率(F12)、直流分量(F13)、前五个峰值点的均值(F14)、功率谱密度形状统计特征(F16)共10个脚步特征参数,并利用上述分类器进行分类识别,平均分类准确率达到91%,相较于试验一10人平均分类准确率提高了11.79%。分类测试结果如图11所示。
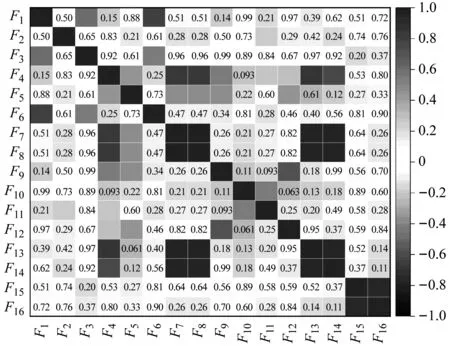
图10 特征选择热力图
3.2.3 试验三
试验一、二中进行分类均采用Lib-SVM中的RBF核函数进行分类准确率的识别。为了提高分类的准确性,本试验中采用试验二中选取的10个脚步特征参数,分别在总人数3、5、7、10人样本情况下,单独一人自由行走通过传感器时,采用线性核函数、多项式核函数、RBF核函数三种情况下对分类准确率的影响。结果显示,3、5人情况下三种核函数均具有相同的平均分类准确率,7、10人情况下,采用线性核函数取得平均分类准确率最高,10人情况下平均分类准确率达到96%。通过对比可以看出对于该数据,采用线性函数作为核函数,最终的分类准确率最高。

图11 分类结果图
3.3 分析与讨论
(1) 通过进行脚步特征参数选取,比较不同分类器核函数,识别人数为10人情况下,平均识别率达到96%,说明分类器在小样本情况下,具有较准确的识别率。
(2) 使用SVM做分类预测时,需要设置的主要参数是惩罚参数c和核函数参数g,本试验中将参数c和g的初始取值范围为2-10~210,使其在2的指数范围的网格内进行离散化查找,使用此参数建立的分类模型对数据的总体识别准确率为96%。
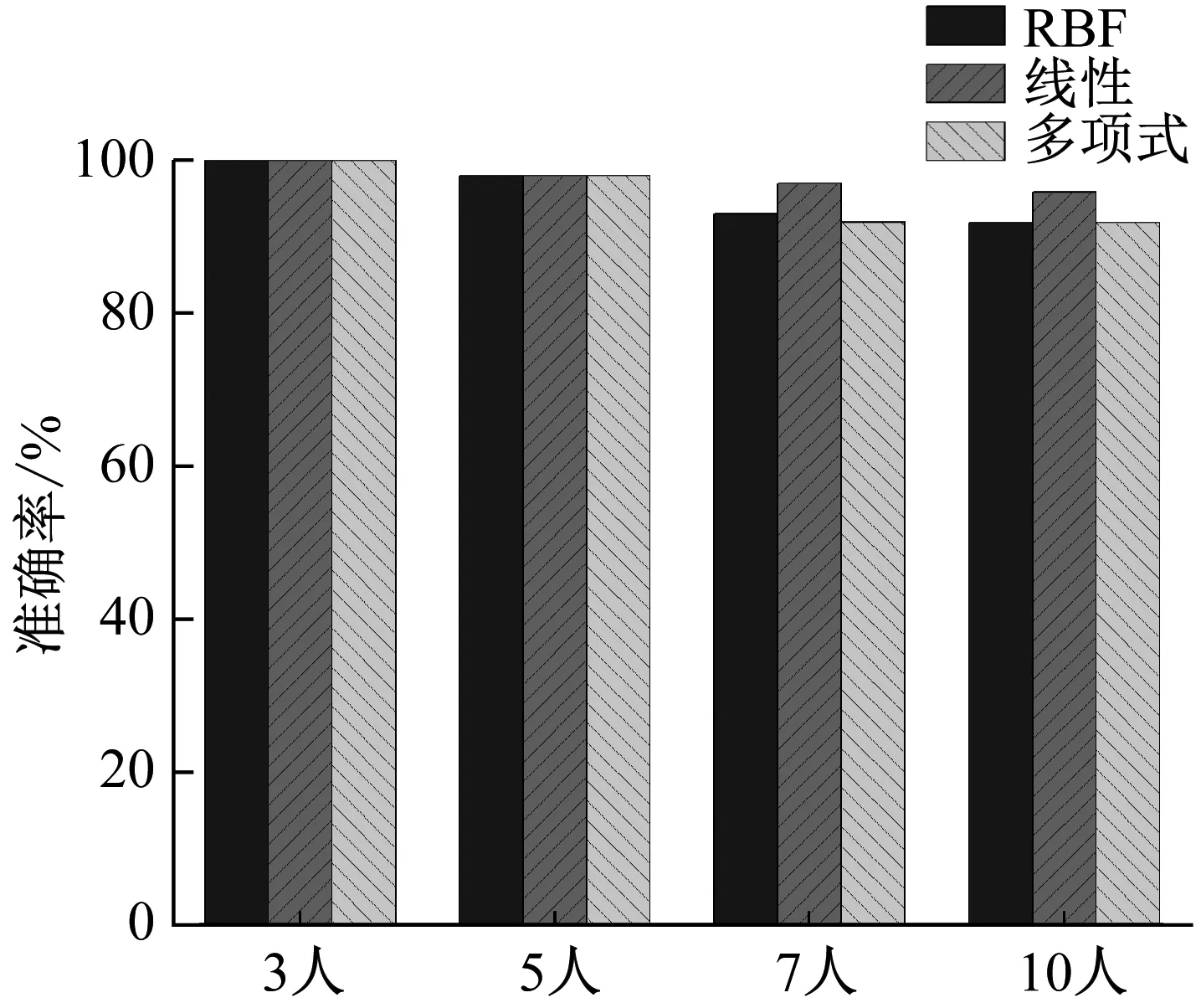
图12 不同人数下不同核函数识别结果
4 结 论
本文中,通过采集人员行走引起的脚步振动信号,分析单一脚步特征参数,证明了提取有效脚步特征组合可以作为区分不同人员身份的依据,并得出以下结论:
(1) 相比于采用传统事件检测方法对脚步信号识别率不高,采用小波阈值降噪结合改进的短时能量阈值检测法对获取脚步事件具有准确的识别性能。
(2) 本研究中,提取脚步事件在时域、频域共10个脚步特征参数组成最优特征组合,采用支持向量机进行分类识别,试验表明,测试人数为3、5人时平均识别率均为100%,10人平均识别率最高达96%。证明了利用该方法,在小样本情况下,对人员进行身份识别的可行性。
(3) 试验设备仅需一个振动传感器采集脚步振动信号,设备安装布置简单,试验成本低。数据处理仅对单一脚步分析,计算量小分类效率高。
本研究还有如下问题值得做进一步工作:脚步振动信号受到不同地板类型、不同测试环境、不同鞋型等因素的影响,因此需要考虑上述因素,对脚步特征参数进一步优化,提高特征参数的普适性和有效性;随着识别人员数量的增加,人员识别精度也相应下降,为了更加符合实际应用后续需要增加测试人员数量;目前对脚步振动信号的采集均是限定测试者进行单人行走,实际应用中多人行走是不可避免的,后续工作需要考虑多人行走情况下脚步振动信号检测与人员识别。
