一种基于无人机平台的战场电磁态势感知系统的设计
2022-12-13刘文博
张 鹏 刘文博 赵 娟
(陆军炮兵防空兵学院信息工程系,安徽 合肥 230031)
0 引言
在现代战争中,无人机装备在侦查监视、辐射源识别、辐射源定位以及精确打击等方面发挥了显著作用。例如在俄乌冲突中,冲突双方都对无线电频谱进行了探测和干扰,并在战场上通过截取对方的电磁信号来获取关键信息,从而对敌进行精准打击。因此,设计一种基于无人机平台的战场电磁态势感知系统,识别对方的辐射源类型并获取精准的辐射源位置,对辅助完成侦查目标反馈具有重要意义。
1 关键技术
1.1 辐射源识别技术
由于每个辐射源都存在发射组件的非线性现象,因此辐射源会发出一些非调制信号,收集这些细微的差异,形成一个特征数据库,通过将辐射源的参数特征与数据库中的特征进行对比,以达到识别的目的[1]。但是这种数据库存在缺点,如果特征参数过多或者有重叠的参数,就会出现无法准确识别的情况。为了避免出现这种情况,将深度学习应用于辐射源识别中,即先对侦查到的信号进行预处理,将处理后的信号输入训练好的模型中进行特征提取和识别,并构建新的网络模型,从而实现精准识别辐射源的目标。
1.2 辐射源定位技术
根据原理可以将辐射源定位技术大致分为主动定位和被动定位。由于主动定位需要发射电磁波,容易受到干扰且极易暴露,因此该系统采用被动定位技术,不需要向外辐射电磁波信号,只需要抓取目标的辐射信号并通过分析接收信号的角度信息、信号强度、相位变化、频率差或者到达时间差等信息估算辐射源的位置[2]。该系统利用多架无人机携带分析仪设备,分别采集辐射源信号的角度信息、到达时间差、信号频段、信号以及强度等信息,通过混合多种传感器采集得到的信息的最大似然估计和卡尔曼滤波求得目标位置估计[3]。
1.3 Node.js技术
Node.js是一个基于V8引擎的JavaScript运行环境,支持跨平台部署,即同样的一套JS代码都可以部署运行在Windows、Linux以及OSX等平台。这主要得益于Node在操作系统与Node上层模块系统之间构建了一层平台层架构libuv。它的特点是可以在服务端运行JavaScript,从而与操作系统直接交互,完成文件控制、网络吞吐以及进程控制等任务。Node.js虽然是单线程的,但是这个线程可以支持高并发连接,避免因大量新增的连接请求而出现内存挤占的情况。它采用事件驱动和异步回调的机制,在执行代码时,主线程从上往下依次执行,遇到有需要回调的地方,就将该处加入事件队列中,然后主线程继续往下走,直到运行结束后才执行事件队列中的回调。当Node.js执行事件队列中的事件时,如果遇到回调,则依然按照顺序添加进入事件队列,主线程依次往下执行,遇到回调就添加,直至执行完毕。Node.js是采用单线程异步非阻塞的模式,在进程中创建一个循环,一个循环就是一个周期,在循环中会从事件队列里查看是否有事件需要处理,如果有,就去除事件并执行相关函数。对阻塞事件的处理任务来说,在幕后使用线程池来确保工作正常运行,不占用主循环流程。它使用了一个事件驱动、非阻塞式 I/O 的模型,异步编程,轻量又高效。
2 态势感知系统的设计
2.1 系统总体架构
该系统可以通过无人机平台对战场电磁环境进行收集、分析、处理和定位,再与地面控制终端数据通信,获取的数据最终由地面终端完成可视化展示。如图1所示,该系统包括无人机平台和地面控制终端2个部分。其中,无人机平台部分主要包括频谱分析模块、数据传输模块以及数据处理模块;地面控制终端主要包括数据处理模块、显示模块、飞控模块以及数据传输模块。

图1 系统总体设计
系统的主要工作流程如下:首先,由控制终端下达区域搜索指令,并预先规划飞行轨迹。多台无人机在接到搜索指令后开始按照规划轨迹对各个监测点进行频谱分析。其次,存储该监测范围内的可疑辐射的位置信息。最后,前往下一飞行位置点工作。如此循环往复,由多台无人机协作完成区域辐射点位置信息的监测工作。为保持电磁沉默,期间不与地面控制终端进行通信,全程采用静默航行的模式。在完成所有既定位置点的频谱分析后,自动返回出发点。在距离出发点500 m时可开启数据传输,将采集到的数据上传至控制终端。控制终端收集数据后对数据进行归类,筛除噪声后,最终完成辐射源的态势图展示工作。
2.2 无人机平台
无人机平台最主要的功能是分析战场电磁环境,其功能模块主要有位置信息模块、频谱分析模块、数据处理模块以及数据传输模块,如图2所示。

图2 系统的功能模块
其中,位置信息模块主要用来获取当前机身位置信息并提供数据用于定位计算辐射源,除此之外,还要具备规划监测点的功能。频谱分析模块主要是根据预先设置的扫描模式和扫描频段进行针对性扫描。数据处理模块则是在获得辐射源信号后,根据信号的角度信息和到达时间差并结合天线的方向信息测算具体的辐射源位置信息。数据传输模块负责接收任务信息并将处理后的数据打包传送至地面控制系统。
2.3 地面控制系统
地面控制系统主要包括航迹规划子系统、任务管理子系统、态势图展示子系统以及用户权限子系统等功能模块,系统的逻辑架构图如图3所示。

图3 逻辑架构图
其中,用户层主要提供操作界面,操控人员通过计算机登录系统。应用层是系统的核心,主要提供航迹规划、态势图展示等子系统的访问接口。服务层主要包括权限管理、数据访问以及应用服务等。数据层主要由存放任务下发流程的数据库和航迹规划等业务信息的数据库以及用于存放辐射源的空间位置信息的数据库组成。逻辑架构的最底层是由数传系统、操作系统以及数据库系统组成的基础层。
其主要工作流程如图4所示。首先,在控制终端上进行航迹规划。其次,将侦查任务派发给不同的无人机。无人机完成侦查后,由控制终端收集侦查数据并进行进一步的数据加工处理。最后,形成电磁环境的态势感知。

图4 工作流程
2.4 基于改进K-均值聚类算法的态势图
通过将无人机获取的各类辐射源数据作为输入数据集,据此提出的态势图呈现算法是基于辐射源之间的间距进行判断并依托经过改进的K-均值聚类算法对多个辐射点进行适当聚类的,合并了同一区域多个距离过近的辐射源,从而提高辐射源坐标的精度。具体算法流程如图5所示。
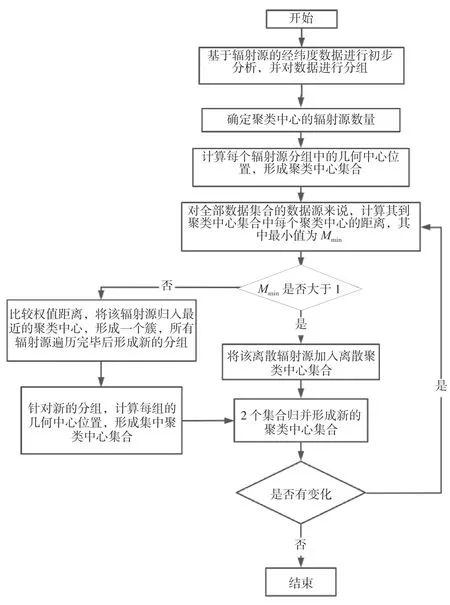
图5 算法流程
该文使用的重要指标为辐射源之间的距离,该实际距离是根据辐射源的经纬度进行计算的,算法步骤如下:1)步骤1。将不同分类的辐射源经纬度数据作为输入数据集S。2) 步骤2。因为经纬度第三位小数的精度为百米级,所以取经纬度的前三位对数据集S进行初次分组。3) 步骤3。初始分组是取步骤2里分组数最大的一组,分组的数量作为侦查到的辐射源的数量,也即是算法中的K。4) 步骤4。对每个分组来说,取数量最大的辐射源类型作为该分组的辐射源分类属性(例如侦查结果判定该地为雷达站的数量最多,则该辐射源的类型就判定为雷达站),并设定对应的阈值距离,通常设定信息中心为100 m,通信电台为10 m,雷达站为30 m。再计算这个簇的几何中心位置,计算完成后形成初始的聚类中心集合G0。5) 步骤5。分别计算每个辐射源与中所有聚类中心的实际距离,将实际距离除以该聚类中心的分类属性的阈值距离,得到归一化的权值距离。假设已知N个聚类中心,Mmin表示某个辐射源点与这N个聚类中心权值距离的最小值,如公式(1)所示。6) 步骤6。判断Mmin是否大于1,如果是,那么计算流程跳转步骤7;如果否,那么跳转到步骤8。7) 步骤7。Mmin>1,说明该辐射源超出了所有聚类中心的阈值距离,算法判定其为独立辐射源,不属于已知的聚类,同时将该点作为独立点加入集合S0。8) 步骤8。MMin<1,通过遍历该辐射源的权值距离,取其最小值,将该辐射源归入该最小值对应的聚类中心,形成新的分组。在完成所有辐射源的权值距离计算后,将获得了一个新的分组方案。9) 步骤9。针对上一步骤产生的方案,重新计算每个分组的中心位置,并将这些中心点形成T0集合。10) 步骤10。将独立点的集合S0与步骤9的T0进行合并处理,从而获得新的聚类中心集合G1。11) 步骤11。如果新的集合G与上一次的集合相同,那么算法结束;如果不同,那么跳转到步骤5,进行新一轮的计算。

式中:Mi(i=1,2,…,N)为该辐射源到每个聚类中心的权值距离。
在算法计算结束后,各个分组方案的中心位置将作为最终确定的辐射源的位置。将处理前的辐射源点标注在地图上,如果这些初始点坐标没有与处理后的中心点重叠,则对中心点到原始点之间进行渐变色处理。
2.5 试验结论
对试验场已知坐标点的辐射源目标进行定位试验,得出以下3个结论:1) 对发射功率较大的辐射源定位效果较好,而对微弱信号的检测存在不足。2)通过聚类算法处理后的辐射源坐标精度变高。3) 对不同航迹规划定位结果进行对比试验。结果表明,定位精度对航迹的变化依赖性很小,说明该算法适合于不同的搜索航迹规划以及不同的搜索时间。
3 结语
面向现代战争中对军事目标的电磁特征识别以及精确定位军事目标位置的需求,该文设计了一种基于无人机平台的战场电磁环境态势感知系统。该系统对无人机侦察的辐射源数据进行处理后,以热力图的方式展示辐射源的类型和具体分布位置,为远程火力精确打击提供依据。
