一种甚高频窄带通信系统的高精度时间同步算法*
2022-12-12沈其林潘雅茹
沈其林,李 冬,潘雅茹
(中国电子科技集团公司第五十研究所,上海 200331)
0 引言
甚高频(Very High Frequency,VHF)[1-2]波段通信系统的频带范围为30~300 MHz,它相对于高频通信系统来说,具有更强的抗干扰能力与可靠性。甚高频窄带通信系统抗干扰能力强、通信距离远,一般采用调频体制进行信号传输,特别适合于非线性限带信道中使用,因此被广泛地应用在电台及电视台广播中,此外,也是航空和航海的沟通频道。
在甚高频窄带通信系统中,同步是系统正常通信的前提,网内所有设备的时间需要精准同步,并且网内多设备协同工作的前提是时间的一致性[3-4]。因此,甚高频窄带通信系统对同步精度和抖动大小的要求非常高,即在长距离、低信噪比的场景下,在相当长的通信时间内同步的抖动要远小于数据传输的符号速率。然而,由于信道收发终端晶振存在一定偏差(该偏差会随着时间而变化),导致接收方每次收到的时间有偏差,且随着时间的累积,偏差加大,导致同步时间在很大的范围内抖动。此外,在低信噪比、长距离通信的环境下,时间同步受到的影响很大。因此,VHF 波段窄带通信系统需要高性能的时间同步方法来保持系统正常通信和定时。
传统的实现时间同步的方法有两种:第1 种是盲估计算法[5-7],包括最大似然定时估计、非面向判决定时估计等,存在成本高、精度低、体积大、不易集成等特点;第2 种是基于数据辅助的同步估计算法[8-11],包括利用训练序列做相关运算、信道估计等方式实现,虽然在一定程度上提高了同步概率,但仍然不能满足同步时间高精度、低抖动的要求,尤其是在长距离、低信噪比下的同步性能仍需提高。
针对甚高频窄带通信系统高精度、低抖动、低复杂度的需求,本文提出一种高精度时间同步算法,该算法计算简单、速度快,不需要与其他设备进行信息交换,网络消耗少。
本文首先介绍甚高频窄带通信系统结构,说明算法适用的系统;其次,分别从帧结构、时间同步方案、同步性能分析3 方面,分析时间同步算法的原理和性能;再次,通过软件仿真证明算法在低信噪比条件下可以减小同步时间误差,提高同步性能;最后对技术挑战和未来工作进行了展望。
1 甚高频窄带通信系统
VHF 波段窄带通信系统采用数字调频系统,其发射端实现方式如图1 所示。

图1 VHF 波段窄带通信系统发射端实现方式
二进制信息数据an∈{0,1},经过双极性化得到数据bn∈{-1,+1},双极性化过程可表示为:

式中:n为二进制信息的序列号。
当传输数据码元间隔为Tb时,由数据bn组成的双极性不归零矩阵脉冲序列s(t)可表示为:

c(t)的计算方式为:
将s(t)送入高斯滤波器进行滤波,可得到待调制的模拟波形x(t)为:

式中:g(t)为高斯预调制滤波器的脉冲响应。g(t)的表达式为:
2 改进的高精度时间同步算法
2.1 帧结构
帧结构的好坏会影响时间同步方法的性能表现[12]。传统的互相关同步的帧结构如图2 所示,每个数据帧由作为相关序列的、长度为L的训练码和长度为Ldata的数据构成。

图2 传统互相关同步的数据帧结构
发射端将长度为Lcor的训练序列放置在长度为Ldata的数据前面作为数据帧结构。接收端将用本地训练序列对该数据帧进行互相关运算,检测互相关值的峰值位置,该操作即为时间同步位置。
本文算法采用分组训练序列法,将一个长度为Lcor的训练序列替换成Q组训练码,每组训练码内容相同,长度为M。因此,时间同步算法的数据帧由Q组长度为M的训练序列及长度为Ldata的信息比特构成,如图3 所示。
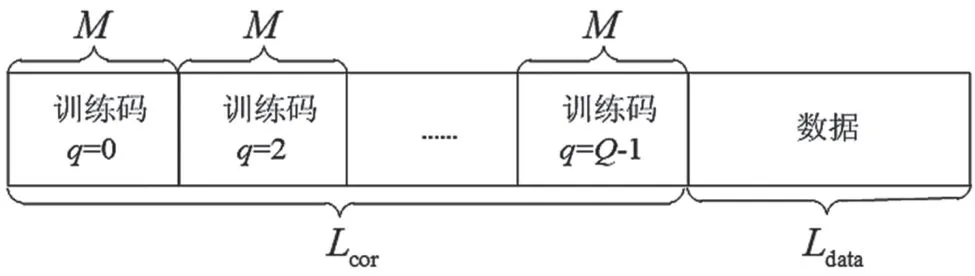
图3 时间同步算法的数据帧结构
2.2 改进的时间同步算法
本文采用的改进时间同步算法的同步流程如图4 所示。

图4 时间同步算法流程
发射端将按照图3 成帧方式组成数据帧,其长度为(Q×M)+Ldata。对数据帧依次进行高斯成形滤波和上变频调制后,发送射频信号。整个通信过程中,连续按照该数据帧结构发送射频信号。
接收端本地将长度为M的训练序列T0进行双极性化处理,得到双极性训练序列T1,其表达式为:

式中:m=0,1,…,M-1。
将双极性序列T1作Osr倍补零内插,可以得到双极性化补零内插训练序列T,表达式为:

当接收端接收数据时,收到的解调模拟波形为z,对z进行采样率为的数字采样,可以得到采样信号序列r0=r0(n),n=0,1,…,N-1,其中,N表示采样序列的长度,且满足N>Q×M×Osr。
以延时单元D=Osr×M为单位,对解调采样信号序列r0作延迟,并与接收端本地的双极性化补零内插训练序列T作延迟滑动相关累加,可得到累加相关值Scor。根据累加相关值可计算得到初始同步时间。延时滑动相关累加如图5 所示。

图5 延迟滑动相关累加
首先取采样信号r0中的前D(D=Osr×M)个采样点与双极性化补零内插训练序列T做滑动相关,可得到第一组相关值Cor0(k)为:

式中:J=2D=2Cor×M。当相关值大于判决门限,即Cor0(k)>Th时,输出第一组的相关有效标志F0。其中,相关门限Th由不同应用场景下Cor0(k)的最大值来确定,表达式为:
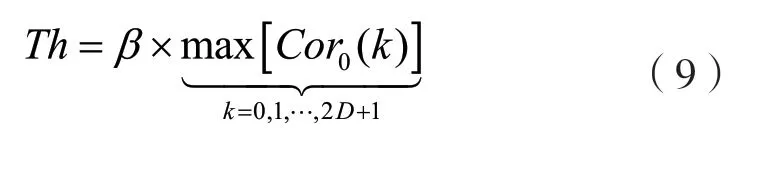
式中:判决门限系数β的取值范围为β∈[0.6,0.9],具体取值需要结合实际情况确定。
将采样信号r0延迟D个样点后,可得到延迟序列r1=r1(k),k=0,1,…,J-1,其中,r1(k)=r0(k+D)。将r1的前D个样点与双极性化补零内插训练序列T做滑动相关,可得到第2 组相关值Cor1(k)为:

当相关值大于判决门限,即Cor1(k)>Th时,输出第2 组的相关有效标志F1。
同理,可以依次得到剩下的相关值和有效标志位。共计得到Q组相关值Cor0,Cor1,…,CorQ-1及对应的相关值有效标志位F0,F1,…,FQ-1。
将Q组相关值累加得到累加相关值Scor,同时将Q组相关有效标志按位相与,可得到累加的相关值的有效标志位F。根据累加相关值有效标志F,在有效的累加相关值Scor中找到最大值Smax,并找到该最大值对应的位置为初始同步时间y。
重复进行P次延时滑动相关累加,可以得到包含P(P的大小根据实际情况确定)个同步时间位置的序列y=yi,i=1,2,…,P。之后,通过最小二乘直线拟合的方法得到同步时间关于帧序号x=xi,i=1,2,…,P的直线方程y=kx+b。其中,参数k和b的表达式为:
在得到直线方程后,后续的数据帧(数据帧序号大于P)对计算得到的初始同步时间y进行校正,可得到最终的高精度同步时间y0,第xi帧数据的同步时间校正公式为:

2.3 时间同步系统性能分析
2.3.1 分组训练序列对系统性能的影响
接收信号和本地同步序列的互相关值可以作为信号同步的标志,互相关曲线的峰值位置表示信号的同步时间位置,则系统的同步正确率指标可以用互相关峰值与其他互相关值的比值来表示,比值越大,则误同步和漏同步的概率越小,互相关性能越好。文献[13]推导了系统的同步正确率指标Φ的公式,见式(14)、式(15)。
设归一化的角频率偏移量为∆w=2π∆f/fs,其中,∆f表示频率偏移量,fs表示采样频率。则系统的同步正确指标Φ可表示为:

式中:snr为信噪比;L为相关码的长度(训练序列的总长度)。
由式(13)可以看出,影响系统同步正确率的因素主要有信噪比、同步码(训练码)长度和归一化角频率偏移量。
对snr=-5 dB 的情况进行软件仿真,研究在不同的归一化角频偏下,系统同步性能随相关码长度L的变化趋势。仿真结果如图6 所示。

图6 训练码长度对同步正确率的影响
从图6 中可以看出,当归一化角频偏为0 时,系统的同步正确率(误判率和漏判率)会随着训练码长L的增长而线性增长,训练码长越长,系统的同步性能越好。而归一化角频偏不为0 时,随着训练码长的增加,系统的同步正确率增至最大值后,开始震荡减小,最终趋于0,并且频率偏移量越大,同步正确率最大值就越小,对应的训练码长就越短。互相关同步易受频偏影响是甚高频窄带通信系统抗干扰能力较差的原因之一。
为了解决这个问题,本算法采用分组训练序列,在发射端以图3 的成帧方式,在信息比特前放置Q组长度为M的训练码,此时,L=QM,训练码的总长度仍为L。此时,系统的同步正确率可以表示为:

对归一化角频偏∆w=0.002,信道信噪比snr=5 dB 的情况进行软件仿真,得到训练码分组数Q的不同对同步性能的影响如图7 所示。
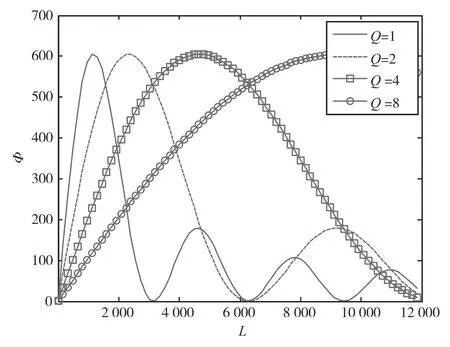
图7 训练码分组数Q 对同步性能的影响
如图7 所示,当Q=1 时,每组训练码长度为L,此时的帧结构为传统互相关同步法的帧结构。可以看到,随着训练码分组数的增加,同步性能的衰减趋势被延缓,可以在一定程度上抑制频偏对同步性能的影响。
综上,分组训练序列法联合延时滑动相关法可以有效提高甚高频窄带通信系统的时间同步性能。
2.3.2 最小二乘拟合对同步性能的影响
频率偏移量的累积可能导致时间同步性能的下降[14-15]。由于信道收发终端晶振存在一定偏差(该偏差会随着时间而变化),因此收方每次收到的时间会有偏差,且随着时间的累积变化加大,导致同步时间的位置在很大的范围内抖动。
最小二乘拟合的思路:选取前P个受收发晶振频偏影响小的同步时间位置,进行最小二乘拟合,用拟合直线取校正之后测量得到的同步时间位置,减小后期频率偏移量累积的影响。
实验证明,对同步时间位置的最小二乘拟合可以在一定程度上改善时间同步系统的性能。仿真分析见本文第3 节。
3 实验及分析
实验采用仿真工具MATLAB 作为甚高频窄带通信系统的仿真软件,研究时间同步算法的性能。仿真参数如表1 所示。

表1 仿真参数
设定判决门限系数β=0.6,最小二乘拟合帧数P=25,对甚高频窄带通信系统进行仿真,将同步时间(同步位置)误差作为评价时间同步算法性能的指标,则最小二乘拟合对时间同步性能的影响如图8 所示。

图8 最小二乘拟合校正对时间同步的影响
图8 显示了最小二乘拟合校正对时间同步的影响。图8(a)表示未经最小二乘拟合校正的初始同步时间的误差。由图8(a)可知,随着发送数据帧数的增加(时间的增长),频偏累积量不断增长,同步时间检测误差的发生概率随之增加,系统的同步性能变差。图8(b)表示最小二乘拟合校正后的最终同步时间位置。可以看到发送帧数不超过设定的拟合帧数25 时,初始同步时间不经过校正,即为最终同步时间;发送帧数大于25 时,初始同步时间被校正,同步时间误差减小。因此最小二乘拟合有效提高了甚高频窄带通信系统的时间同步性能。
在信噪比snr=-3 的情况下,将传统的互相关时间同步算法与本文提出的高精度时间同步算法的仿真结果进行比较。图9 为两种算法的同步时间比较,图10 为两种算法同步时间误差比较。
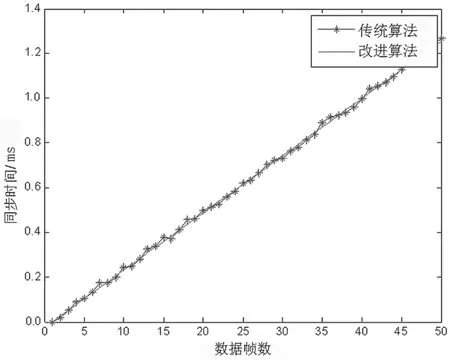
图9 两种算法同步时间位置的比较

图10 两种算法同步时间误差的比较
从图9 可以看出,受噪声和频偏的影响,传统的互相关时间同步算法的同步时间误差较大,而改进的高精度时间同步算法的同步时间误差相对较小、较稳定。
从图10 可以看出,在仿真中传统时间同步算法的误差较大,高达10 μs,无法完成长距离、低信噪比稳定传输的任务;而改进的时间同步算法仅有微小误差,误差远小于传统时间同步算法,可以控制在0.5 μs 以下。显然,改进的高精度时间同步算法可以极大提升甚高频窄带通信系统的时间同步精度。
为了研究该算法在不同信噪比下的同步稳定性,在信噪比范围为(-5 dB,5 dB)的高斯环境下进行蒙特卡洛仿真实验,并在每个信噪比条件下进行100 次仿真并获取其统计数据。表2 给出了不同信噪比条件下同步时间测量值的均方误差。

表2 不同信噪比下的同步时间均方差
表2 显示,随着信噪比的增大,最终同步时间的均方误差不断减小。在信噪比为-3 dB 时,本算法的同步时间均方差为0.183 6 µs,表明算法稳定性强、同步时间抖动小。
本文算法实现简单,目前已经在一片XILINX的芯片中实现,用于提高甚高频窄带通信系统的性能。该系统经过实际测试,设定训练码组数为8,每组码长为32,采样倍数为8。设定拟合帧数为25,在实验室环境下,运行96 h,测试得到的同步时间y0的精度可达到,所有y0的抖动均在以内,实现了高精度、低抖动的时间同步。
4 算法优势及未来挑战
本文提出的甚高频窄带通信系统的高精度时间同步算法具有如下优势:
(1)提高了长距离、低信噪比下甚高频窄带通信系统中时间同步的精度,降低了长距离、低信噪比下甚高频窄带通信系统中时间同步的抖动。
(2)全程采用数字信号方式实现,实现简单,对硬件资源消耗小,可移植性强。
甚高频窄带通信的高精度时间同步算法可以实现高精度、低抖动的时间同步要求,但仍面临一些技术挑战:
(1)最小二乘拟合的直线方程仅由前P帧数据帧的同步时间确定,且P的取值需要根据工程实践确定,不恰当的取值会影响时间同步的性能。
(2)最小二乘的拟合准则仅考虑拟合直线与初始同步时间y的平方和最小。可以根据通信系统的实际需求改进拟合准则,进一步提高时间同步算法的性能。
5 结语
本文提出了一种甚高频窄带通信系统的时间同步算法。该算法通过联合分组训练序列法与最小二乘拟合法,在发射端将多组重复的短训练序列作为相关序列,以特定的帧格式发送信号;在接收端将本地训练序列与采样信号序列进行延迟滑动相关累加,得到初始同步时间,并根据之前通过最小二乘拟合得到的直线方程对初始同步时间进行校正,可以得到高精度的同步时间。软件仿真结果证明,本文算法与传统的时间同步算法相比,同步时间误差与均方差更小,能有效提高时间同步性能。工程实践也证明了该算法同步精度高、抖动小、易实现。最后,对未来工作进行了分析,为进一步提高算法性能提供了思路。
