数字孪生制造智能网联汽车事故数据记录技术
2022-12-11王淳浩阮利闭家铭段汶含张景轩
王淳浩,阮利,闭家铭,段汶含,张景轩
(1.北京警察学院 北京市公安局智能网联汽车交通事故调查与重建标准实验室,北京 102202;2.北京航空航天大学 软件开发环境国家重点实验室,北京 100191;3.证据科学教育部重点实验室(中国政法大学),北京 100088;4.云南省区块链应用技术重点实验室,云南 650233)
0 引言
据公安部最新统计,截至2022年3月底,全国机动车保有量达4.02亿辆,其中汽车3.07亿辆,中国机动车保有量稳居世界第一。根据《智能制造发展指数报告(2021)版》,在离散型制造行业中,汽车智能制造能力成熟度排名前二。可见,汽车制造一直以来都是智能制造行业的最典型最核心研究领域[1]。智能网联汽车是具备环境智能感知、智能决策和自动控制,或与外界交互乃至协同控制功能的汽车,又被称为智能汽车、自动驾驶汽车等,近年来已成为国内外研究热点[2,3]。我国2021智能网联汽车出货量已达1370万辆,预计2025年智能网联系统配备率将达到75.9%,整体将超越全球平均水平。预计2024年是驾驶自动化等级为L4级的智能网联汽车特定场景商业运营起始时间点;2025年将实现《智能汽车创新发展战略》规划的L3规模化和L4部分场景商业应用的发展目标,且自动化等级为L2级及以上的智能网联汽车销量将达到千万级规模。智能网联汽车已被列入交通强国战略和《中国制造2025》建设的核心前沿内容之一,更是人工智能落地综合应用的关键试验场。
另据《中华人民共和国道路交通事故统计年报》统计,2017年至2020年我国交通事故年均达23.51万次,年均死亡人数已达6.29万人,受非致命伤害24.38万人。道路交通事故处理与预防一直以来是理论界和实务界的重要研究方向,而数字警务是当前警务战略发展的新方向。面对智能网联汽车交通事故处理与预防的新挑战,事故调查取证、检验鉴定、成因分析等是汽车制造企业的核心典型公安交通管理应用场景;汽车事故数据记录系统作为支撑上述应用的装备,被国家标准规定强制安装于相关类型的车辆是必然的。针对智能网联车交通事故处理与预防的实际需求,高级集成的事故分析装备智能制造企业与车联网技术有机结合,将会使企业连同其业务、生产流程和生产设施,与交通事故调查取证、检验鉴定、成因分析等公安应用,以一种全新的方式达到前所未有的协同智能。美国罗克韦尔 公司(Rockwell Automation)认为这种协同制造方式是“工业4.0”最高阶段。近年来,数字孪生技术作为推动汽车智能制造及工业互联网应用落地的重要使能技术,是实现上述协同生产工业4.0最高阶段的前沿新兴技术,有望成为推动汽车企业数字化转型的新动能[4,5]。对于汽车事故数据存储装备数字孪生制造,数字孪生核心是以汽车事故关联的数据和模型驱动,以解决汽车事故关联物理对象和汽车事故数字对象的交互共融为目标的一种集成、交叉、融合创新的道路交通事故处理技术。
汽车车载事故数据记录系统,是监测和评估车辆安全系统性能、记录汽车事故数据最重要的存储载体,更是道路交通事故处理部门用于事故调查取证、检验鉴定和事故成因分析的核心关键数字化装备之一[6]。2021年8月,工信部发布的《工业和信息化部关于加强智能网联汽车生产企业及产品准入管理的意见》103号文件规定智能网联汽车产品应具有“事件数据记录系统EDR(Event Data Recorder)”和“自动驾驶数据记录系统DSSAD(Data Storge System for Automated Driving)”功能。同时,基于该装备采集的各传感器的车辆实时状态数据及其在车辆安全与乘员保护、道路交通事故调查与重建等方面的应用,是数字孪生化汽车事故存储装备制造过程中,事故数据和事故场景构建的核心基础[7]。
随着智能网联、自动驾驶等技术日趋成熟和核心装备国产化卡脖子问题日益突出,汽车事故数据记录系统因其在汽车数字孪生制造场景构建、车辆安全与乘员保护、道路交通事故调查与重建等方面的关键性作用,软硬件研制及新场景下的应用必将成为一个热点研究方向[8]。
然而,现有研究存在如下三方面问题:
1)目前,汽车事件数据记录系统国家标准于2022年1月实施发布中,DSSAD的标准仍在制定过程中,缺乏根据标准的研制方法;
2)已发布的汽车事故标准只给出了设计和参数规则,更多面向通用性测试和应用场景;
3)关键芯片、软硬件仍对国外标准依赖性强。
总体缺乏针对公安警务聚焦场景的事故数据装备制造流程、关键技术、事故数据记录产品,以及面向警务数字孪生制造场景的车载记录系统制造技术的研究。
针对现有研究存在的公安警务场景聚焦性不足、智能网联场景事故记录系统制造流程、尤其孪生制造架构缺乏等问题,本文提出了一种公安警务场景智能网联汽车数据记录系统制造数字孪生功能架构;面向警务车载事故数据记录场景,从数据和应用场景物理空间角度,介绍了孪生物理空间中车载事故数据记录设备的前沿进展、数字孪生制造架构、关键技术、以及警务应用场景。针对数字警务场景,从智能网络汽车事故数据记录系统的数字孪生制造角度创新,为研究界和工业界提供了前瞻性架构和设计借鉴。
1 相关研究
1.1 警务场景智能网联汽车事故数据记录系统相关研究进展
数字警务场景是智能网络汽车制造的关键应用场景。针对EDR在交通事故处理领域的应用,钱宇彬[9]等总结了国外EDR相关标准、法规,邱金龙等[10]总结总结了相关数据在汽车被动安全、主动安全及交通事故重建中的应用。李毅等[11]分析了EDR数据规范和准确性验证角度,介绍了EDR数据在车内乘员人体损伤预测、事故重建领域的应用进展,进行了基于真实事故的EDR重建应用。
我国汽车事件数据记录系统国家标准刚于2022年1月实施,对自动驾驶来说,DSSAD的标准仍在制定过程中[12]。李川鹏等[13]分析了自动驾驶数据记录系统标准及其汽车测试应用。Peixuan Li等人[14]提出了端到端训练方式的统一架构,进行3D对象检测和跟踪。Ying Zhang等人[15]提出了一种安全节能决策框架,可以避免潜在的追尾碰撞。Zijun Liu等人[16]提出了一种分层抗干扰跟踪架构,基于steerby-wire系统来提高跟踪精度和动态稳定性。LI A等[17]研究了自动生成复杂和多样的动态测试场景的仿真自动驾驶测试。An Guo等人[18]设计并实现第一个基于激光雷达的自动驾驶车辆测试工具LiRTest,能有效地检测其在各种驾驶条件下的错误行为。
现有车载事故数据记录技术相关研究总体聚焦于EDR和DSSAD标准制定和仿真应用。现有相关标准存在只给出了设计和参数规则,关键芯片、控制器等软硬件均更多是国外产品,总体缺乏针对我国警务聚焦场景的汽车事故数据装备制造流程、关键技术和事故数据记录的公开报道。
1.2 汽车数字孪生制造相关研究
数字警务场景是智能汽车制造的关键应用场景。
2020年Ziran Wang等[19]为联网车构建数字孪生模型。2021年Ghanishtha Bhatti等[20]介绍了适用于智能电动汽车用例的数字孪生技术,如预测移动性和驾驶员辅助系统等。同年,梁恩云等[21]阐述了在测试安全方面数字孪生技术对自动驾驶测试的重要性。2022年Bo Yu等人[22]提出一种自动驾驶系统开发范式。
综上可见,现有汽车数字孪生技术更多关注于汽车通用制造体系设计,聚焦重点在于汽车制造相对成熟的场景,包括汽车车间构造,汽车虚拟测试等。尚缺乏公安警务视角数字孪生的面向汽车事故数据记录制造架构和技术的研究。
2 警务场景智能网联汽车数据记录系统数字孪生制造架构
2.1 警务场景事故记录孪生制造需求分析
警务场景对数字孪生装备制造场景,提出了核心需求,确保能够支撑:
1)汽车生产的安全性;
2)交通事故数据的合规性管控技术;
3)交通事故现场勘查标准与技术;
4)交通事故证据取证标准与技术;
5)交通事故检验鉴定;
6)交通事故成因分析和责任认定;
7)交通事故预防与对策。
2.2 警务场景智能网联汽车数据记录系统数字孪生制造架构
本文提出的公安警务场景智能网联汽车数据记录系统制造孪生架构主要包括标准支撑层、设备物理空间层、采集层、虚实映射层、管理决策层组成,如图1所示。
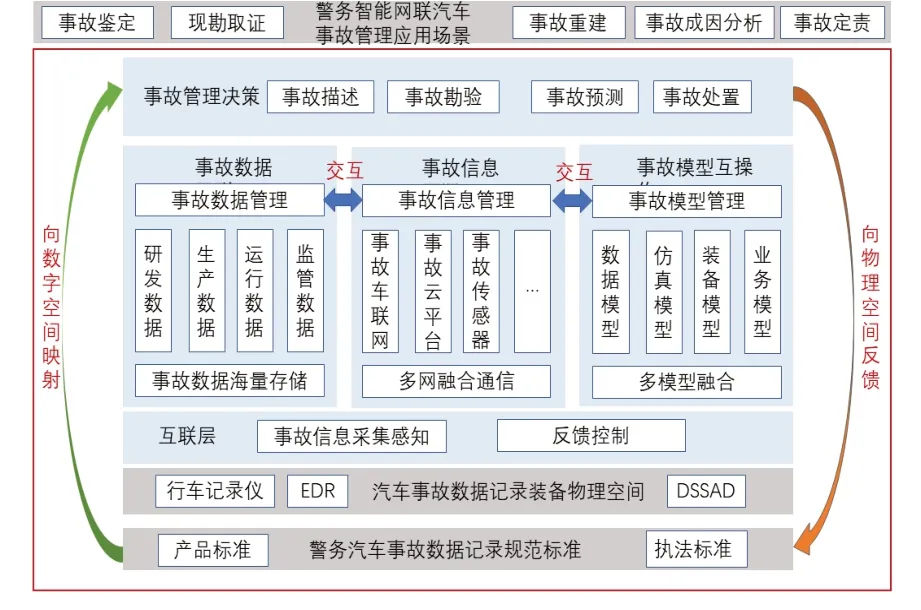
图1 智能网联汽车事故数据记录系统数字孪生制造架构
在标准支撑层,公安警务场景主要可包括产品标准和执法标准两个大类,产品标准是围绕警务场景对智能网络汽车制造车厂及其数字孪生虚实空间提供产品生产意见;执法标准为警务人员提供取证、鉴定和定责等执法标准。产品标准包括:
1)《汽车事件数据记录系统》(GB 39732-2020),已强制要求于2022年1月1日起实施;
2)《车载视频行驶记录系统》(GB/T 38892-2020),已于2020 年12月1日实施;
3)《汽车行驶记录仪》(GB/T 19056-2012),重点适用于所有客车、危险货物运输货车、半挂牵引车和总质量大于等于12000kg 的其他货车装备的行驶记录仪制造;
4)中华人民共和国交通运输行业标准《道路运输车辆卫星定位系统终端技术》(JT/T 794-2011),重点适用于道路运输卫星定位系统中安装在车辆上的终端设备制造。
执法使用标准主要有:
1)中华人民共和国公共安全行业标准《汽车车载电子数据取证技术规范》,自2020年4月起征询意见;
2)中华人民共和国司法司法行业标准《汽车电子数据检验技术规范》(SF/T 0077-2020),已于2020年5月29日发布实施。
警务场景智能网联汽车数字孪生制造车载事故数据记录系统制造网络如图2所示,数字孪生分别与环境、人和自身交互,同时事故数据、服务、实体和模型之间相互交互。
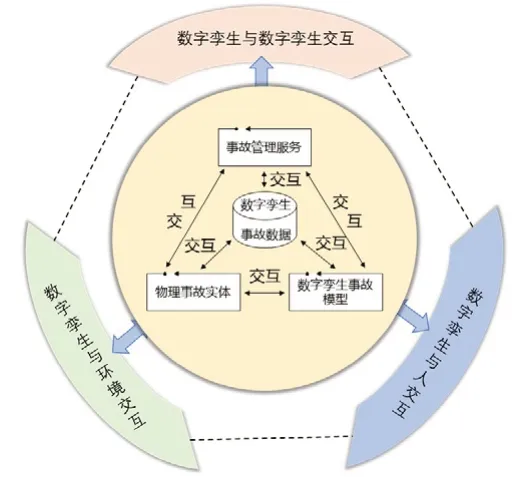
图2 事故数据记录数字孪生网
3 警务场景智能网联汽车数字孪生制造车载事故数据记录关键技术
本节依据工业和信息化部关于加强智能网联汽车生产企业及产品准入管理的意见》规定智能网联汽车产品应具有“事件数据记录系统EDR(Event Data Recorder)”和“自动驾驶数据记录系统DSSAD(Data Storge System for Automated Driving)”强制性标准要求,从警务需求视角,介绍了数字孪生制造中的汽车事故数据记录装备EDR和DSSAD制造架构和关键技术。
3.1 汽车事件数据记录系统制造技
EDR 雏形可追溯到美国高速公路交通安全局(NHTSA)1970年提出研制机动车碰撞记录仪;国外汽车生产商纷纷开始在气囊控制模块中内嵌小型存储器。
3.1.1 汽车事件记录系统软硬件场景架
我国《汽车事故数据记录系统》(GB 39732-2020)中指出EDR系统“包含在一个或多个车辆电子模块中,用于监测、采集并记录事件发生前、发生时和发生后车辆和乘员保护系统的时间序列数据的功能,旨在事件发生后提取数据”。本文所提出的面向警务场景的EDR的核心传感器模块、通信和控制逻辑总体设计如图3所示。总体包括传感器模块、控制器、提取模块、事故分析软件、事故场景构建等技术。

图3 EDR的软硬件架构和警务场景
3.1.2 事故数据记录
系统重点记录碰撞前、碰撞过程中和碰撞后短时间(几秒钟)内车辆的技术数据和乘员信息。事件数据记录项与警务场景映射如表1所示。
3.1.3 数据存储机制
数据存储部件制造过程包括如下模块块,下述模块为表1中的事故数据、事故信息、事故模型提供控制、安全气囊和侧翻等制造支撑:
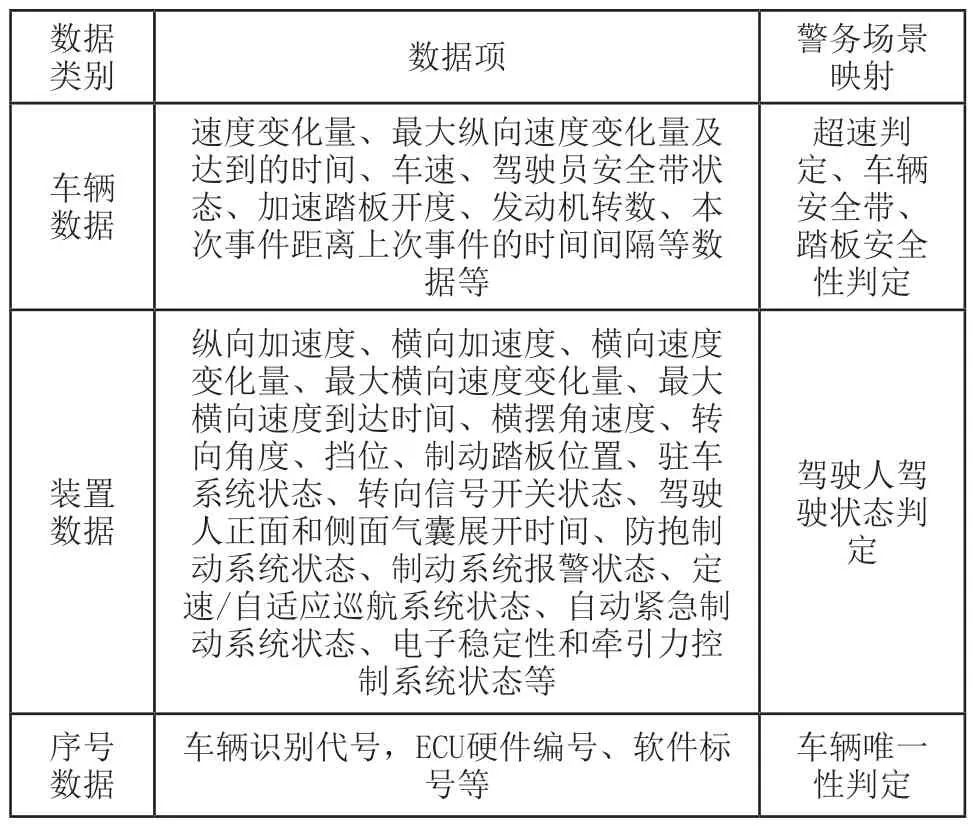
表1 事件数据记录项与警务场景映射
1)电控模块(Electronic Control Module,ECM),负责控制功能;
2)侧翻传感器(Rollover Sensors,ROS),记录车辆侧翻角度、监控乘员约束系统;
3)安全气囊控制模块(Air-bag Control Module,ACM),监控/记录安全气囊工作状态等。
其中,EDR制造要符合如下要求:
1)触发阈值功能要求:
当触发阈值达到规定值时,EDR控制器触发记录事件数据事件。
2)存储覆盖功能要求:对锁定条件事件数据,不能被后续新事件数据覆盖。如系统记录事件空间已满,新增事件数据采用按时序覆盖算法覆盖不满足锁定条件的历史事件数据;
3)存储事件记录次数参数:该参数设定为至少记录连续三次完整碰撞事件数据;
4)掉电存储功能:系统自身应具备在车内供电回路已失去正常供电功能时的备份供电。断电后电量应能满足:①读取的 EDR 记录应包含T0之前的全部数据和T0之后(150±10)ms的数据存储要求;②若系统功能由气囊控制模块实现,至少能满足展开气囊并记录150ms事件数据的电量需求。
3.1.4 互连网络设计
车载电子设备,通过传感器和算法采集车辆运行过程中的各类感知识别、系统状态、系统运行、碰撞前后等数据,经由汽车控制器局域网(Controller Area Network,CAN)总线传递给EDR并存储。
3.1.5 数据读取技术
读取系统主要由事故取证计算机、USB线、通讯接口(VCI)、电源适配器、J1962诊断传输线、待取证事故车辆组成,设备及接口设计如图4所示。

图4 事故数据读取设备和接口
3.2 自动驾驶事故数据记录技术
3.2.1 自动驾驶数据存储系统面临的挑战
自动驾驶系统部分或者全部替代人类驾驶员,交通事故和侵权责任主体面临从人类驾驶员将扩大到制造商、软件设计者等主体的挑战。
自动驾驶系统面临数据层面挑战包括:从传统数值碰撞数据,转换到音视频多模数据;事故数据存储系统面临海量多源;数据传输网络面临高带宽低延迟传输需求。
3.2.2 EDR对自动驾驶场景不适应性分析
EDR是现场勘验取证和事故重建分析的最重要抓手,然而对于智能网联汽车场景面临如下挑战:
1)由于存储容量等限制,无法实时连续记录车辆运行数据,开展实时监控;
2)EDR要达到预设碰撞阈值,才触发碰撞事故数据记录。因此阈值触发机制决定了,其对轻微刮蹭事故、轿车碰撞行人等事故场景的下事故车辆,碰撞数据会产生缺失;
3)对复杂事故场景,如二次甚至多次碰撞,EDR中前期碰撞事故数据,存在因数据覆盖而导致碰撞记录数据丢失风险;
4)数据存储于车内,读取需专门设备和接口支持,不支持汽车厂商和事故处理中心云端管理;
5)肇事车辆逃逸后,事故数据和本次事故的关联性鉴定困难;
6)传感器和控制器总体通过CAN总线互连,无法适应大数据和高安全性等需求。
3.2.3 自动驾驶数据记录系统
2019年6月,世界车辆法规协调论坛WP.29下的自动驾驶与网联车辆工作组(GRVA工作组)成立EDR/DSSAD非正式工作组进行标准研究,在2020年6月发布的ALKS法规中规定了DSSAD应具备的功能。2021年8月,我国工信部发布了《工业和信息化部关于加强智能网联汽车生产企业及产品准入管理的意见》103号文件,规定了智能网联汽车产品应具有事件数据记录系统和自动驾驶数据记录系统功能。美国承担车辆安全评估和道路交通事故调查职责的国家公路交通安全管理局(NHTSA),2021年6月29日发布的1号指令《关于自动驾驶系统和L2级高级辅助驾驶系统的事故报告》中明确要求:“配备SAE标准定义下的L2级高级辅助驾驶和L3~L5级自动驾驶的整车制造商以及汽车软件提供商和测试运营商,必须及时将所有在美国公共道路上发生的碰撞交通事故报告提及NHTSA”。自动驾驶事故数据记录系统结构及其云边端协同制造架构如图5所示。

图5 自动驾驶事故数据记录系统结构及其云边端协同制造架构
3.2.4 数据记录与警务场景映射
自动驾驶系统由于是智能交通的“车-路-云-网“架构中的核心,数据记录是自动驾驶数据记录系统最核心功能。
联合国ALKS法规以联合国《自动驾驶框架文件》为指导,将安全作为战略核心,从系统安全、故障安全响应、人机界面(HMI)、自动驾驶数据存储系统(DSSAD)、信息安全及软件升级等方面。该标准针对数据存储系统分析了存储的数据类型、存储位置、记录的事件和数据元素确保数据安全和数据保护、访问数据的方法。结合道路交通事故管理场景和DSSAD记录的数据元素,分类整理归纳如表2所示,主要包括记录事故发生前的车辆状态、驾驶员的操作以及自动驾驶系统内部的感知、规划、决策等数据。
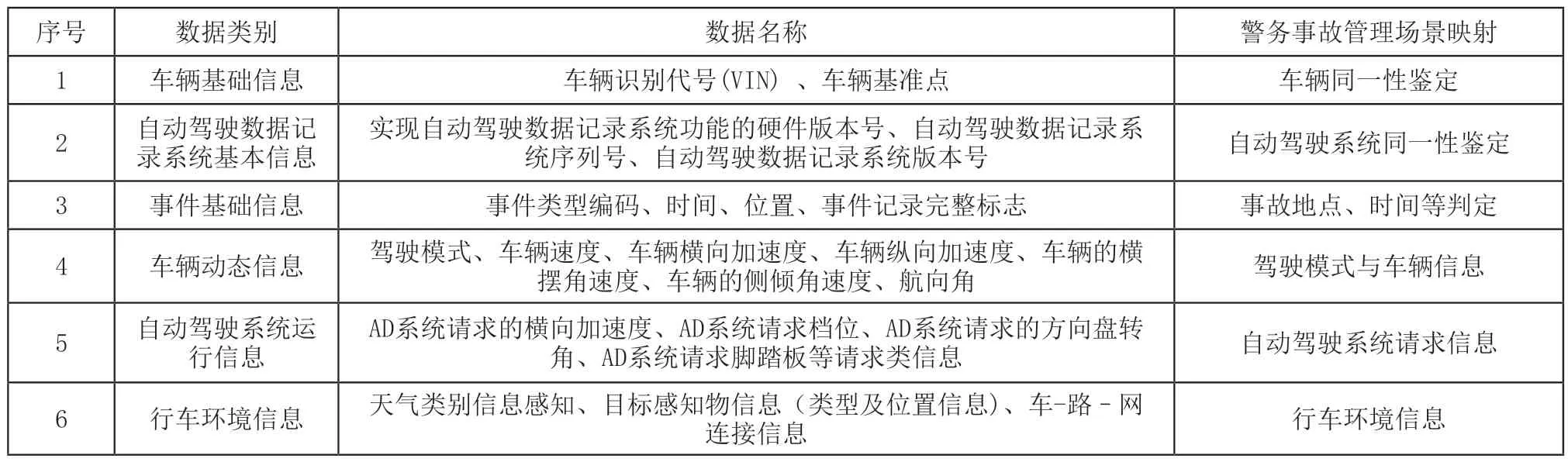
表2 自动驾驶事故数据和警务事故管理场景映射
3.2.5 基于事故关键性分区的事故数据存储方法
现有的DSSAD是个通用标准,对公安警务场景未专门规范,因此,本文提出一种基于事故关键性分区的交通事故数据存储方法。如图6所示,本文依据道路交通事故处理场景(取证、鉴定、责任判定)关键性级别,将DSSAD存储区域分为安全攸关事件存储区、风险事件存储区和一般事件存储区。

图6 基于事故关键性分区的事故数据存储
安全攸关事件存储区主要存储碰撞事件,参考EDR标准,触发碰撞事件的阈值为:纵轴方向以及横轴方向车速变化达到150ms时域超过或等于8km/h;如果该事件持续时间不足150ms,则车速变化超过或等于8km/h时,该事件也需被记录。锁定条件为:不可逆约束装置(如气囊)展开,或150ms时间区间内在纵轴方向上车辆速度变化达到超过或等于25km/h;且事件数据不应被覆盖。参考联合国ALKS法规,导致车辆与其他道路使用者或障碍物相撞的情况或事件,碰撞风险无法通过低于5m/s2的制动指令来避免,且事件的数据不能被后续事件的数据覆盖。
风险事件存储区主要存储有碰撞风险的事件,参考联合国ALKS法规,主要是满足非锁定事件触发条件:行驶速度大于60km/h,如果没有足够空间记录,可以按时间顺序依次覆盖之前非锁定事件数据。
一般类型事件存储区内的事件可按照FIFO规则进行覆盖记录。
非安全风险事件存储区和一般类似事件存储区的事件包括以下类:自动驾驶系统激活、自动驾驶退出、发生接管操作、碰撞避免控制、自动驾驶系统达到最低风险控制、车辆发生严重故障、自动驾驶系统发生严重故障。
3.2.6 数据传输网络
高阶自动驾驶汽车通信网络设计需求包括:
1)高带宽和低延迟的事故管理网络;
2)连接所有传感器、摄像头、诊断工具、通信系统以及中央人工智能,事故数据和分析不再局限于碰撞检测,而将涵盖音视频等多模态的事故鉴定等技术。
对新型自动驾驶控制器来说,常用车载网络有CAN、LIN、FlexRay、MOST和LVDS等。除LVDS外,其他均为汽车行业专用通信网络。虽然现有大部分汽车仍将通过CAN或LIN.联网,事故数据传输现阶段仍采用上述机制。但随着自动驾驶系统需求增加,上述总线受限于低带宽、面积较大等因素,已不能适应自动驾驶高数据传输速度和海量数据要求,自动驾驶系统通信网络连接操作设计将主要包括:
(1)中央域控制器单元中的芯片连接;
(2)传感器接口输入连接;
(3)调试接口连接;
(4)存储连接等。
同时,DSSAD还涉及数据安全读取、人机交互、数据安全管控等方面的问题。
4 警务场景智能网联汽车事故数据记录应用场景
警务场景智能网联汽车事故数据记录应用场景是数字孪生场景建模的核心。
4.1 被动安全场景
被动安全应用场景主要包括安全气囊和约束系统制造。
安全气囊制造过程,可通过监控的安全气囊碰撞表现数据得到改进。
乘员约束系统制造,可通过EDR记录的乘员约束系统真实碰撞中的相关真实数据发现并改进该系统的状态和需改进之处。
对比测试数据或仿真数据,真实事故场景的真实碰撞数据,可作为数字孪生体系中的输入,能够更真实反应乘员约束系统的碰撞表现,可用于检测和优化其在真实场景中的表现。
4.2 主动安全场景
事故记录数据在主动安全领域中的警务应用场景包括:
1)智能网联汽车碰撞场景重建
根据现场事故碰撞后的数据,还原碰撞人-车-路-网真实环境、智能网联汽车各部件反馈情况,再依托警方交通事故现场图、现场勘查笔录、痕迹物证和视听资料提供的数据和信息,可实现事故碰撞场景的数字化重建,作为数字孪生制造的双向输入输出。
2)主动安全的仿真数据来源
碰撞前后数据,可作为主动安全预防系统的的数据来源基于该数据可进行事故仿真和预防。
3)智能网联汽车整机和关键部件的测试和制造优化
事故记录数据可评估整车、智能网联汽车数据存储、自适应巡航控制系统、防抱死制动系统、多源汽车传感器、车联网络等软硬件部件,可测试和检测其性能,改进产品设计制造,提高孪生制造整体性能。
5 结语
智能网联汽车成为交通强国战略和《中国制造2025》建设重要方向的同时,其事故数据记录系统制造涉及芯片、整机和软件等多个“卡脖子”产业链环节,具有较高技术门槛,亟需开展制造研究。本文聚焦公安警务场景,提出了一种警务场景智能网联汽车数据记录系统制造孪生功能架构,以及软硬件和场景构建关键技术,为国内外研究界和产业界数字孪生智能网联汽车事故记录系统的制造提供了借鉴。本团队正在从事的未来的研究方向包括公安警务场景的数字孪生智能网联汽车的事故数据记录系统及其关键技术的研究。