基于模型整体逼近的机械臂RBF网络自适应控制
2022-12-08黄杰
黄 杰
(重庆交通大学机电与车辆工程学院,重庆 400074)
0 引言
工业机械手臂是一种自动操作装置,可以模拟人类手和手臂动作实现某些功能。因此,广泛应用于机械制造等制造领域的生产[1-3]。一方面,人类不大愿意从事重复性工作,喜欢善于进行战略思考。此时机器人的作用就凸显出来了,它们就可以代替人类从事这些工作。因此,一些基于活动级控制的机械工业手臂可以充分发挥两者的优势:操作者只需要指定机器人需要做什么、完成什么工作内容,机器人只需要负责完成一步步的指令,最终就把任务完成了。这样,一个工人就可以操作多个机器人展开有序工作,从而就可以减少所需人数,大大降低项目成本[4]。随着科技的不断发展,机器人在人类的生活随处可见,例如:机器人在军事、医学、农业、工业上的广泛应用。机器人的出现将会用更少的劳动力去保质保量完成既定的工作,完成一些人类无法完成的事[2]。这些工业机器人和人一样由手臂和手指组成,可以代替人类从事机械化和自动化的繁重工作,甚至这些工作有可能是在危险条件下进行,因此,工业机械手臂被广泛应用于机械、冶金、电子等行业,轻工业和原子能[5-6]。
以工业机械手臂为研究对象,利用拉格朗日数学原理建立了两自由度工业机械手臂的动力学模型。针对二自由度工业机械手臂设计了基于模型整体逼近的机械臂RBF网络自适应控制器,并且基于s函数在Matlab中创建了Simulink控制图。采用模型整体逼近的机械臂RBF网络自适应对机械臂的轨迹跟踪性能进行了仿真并且验证了控制算法的有效性。
1 基于模型整体逼近的机械臂RBF网络自适应控制
神经网络广泛地应用于系统不确定项的辨识。文献[7]使用神经网络对时变的机械臂动力学系统中的不确定项进行了辨识,由此提高了控制精度;文献[8]使用神经网络对套索传动系统进行辨识,调高了套索传动的跟踪精度。因此,可以使用神经网络对柔性机械臂动力学系统中的柔性耦合非线性项进行辨识,然后以内控回路的方式对输入力矩进行补偿。文献[9-10]的创新之处在于它将柔性机械臂等效为柔性梁模型,这大大简化了模型的复杂性。其次利用假设模态法建立了柔性机械臂伺服系统的动力学方程。在动力学的建模过程中将重力因素加以考虑。
我们以工业机械手臂系统的动力学模型为:
2 基于模型不确定部分的RBF网络逼近
采用RBF逼近不确定项f,那么神经网络模型的输出为设计的控制率为
控制率取:τ=(x)+Kv r-v,鲁棒项v取:v=-(εN+bd)sgn(r),被控对象中的(fx)取(fx)=M(q)ζ(1t)+C(q,)ζ(2t)+G(q)+F()。其中,ζ(1t)=+,ζ(2t)+Λe。
3 控制器的收敛性分析
从图1可以看出,在基于模型整体逼近RBF网络自适应控制下,关节1在1.3时能够较为精确跟踪期望轨迹,0~1 s过程中抖动较大,最大超调量为0.032 rad。关节2在1.4时能够较为精确跟踪期望轨迹。0~0.8 s过程中抖动比较大,最大超调量为0.028 rad。
图2显示了基于模型整体逼近的自适应RBF网络控制所获得的两个驱动力相对稳定,且平滑,无需大抖动,由于采用RBF神经网络对系统进行无限精度逼近,不确定项(f)项能够有效地补偿轨迹控制误差,减少系统不确定性因素对系统的影响。

图2 关节1与关节2驱动力矩
由图3RBF网络对于不确定项及其估计值的逼近结果可以看出,不确定项在0~2下降得非常厉害,当2 s以后不确定项及其估计值始终维持在40~42内波动,从而极大减小了不确定项对于工业机械臂在工作过程中的干扰。
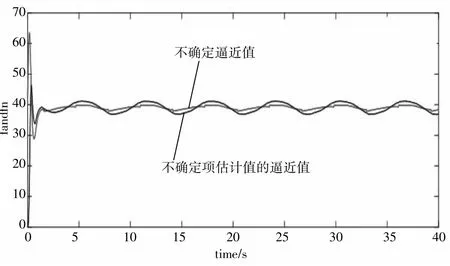
图3 对于不确定项及其不确定项估计值的逼近结果
4 结语
研究了工业机械臂工作过程中的轨迹控制补偿算法偏差大、鲁棒性差、效率低跟踪控制问题,根据李亚普诺夫稳定性原理,设计了一种基于模型总体逼近的RBF网络自适应控制,由于实际的制系统中模型建模的不精确会导致控制性能的急剧下降,因此本文提出对模型不精确部分进行逼近。并利用RBF神经网络对系统的不确定项进行了补偿,得到了RBF网络自适应控制。通过仿真实验得到如下结论:
(1)基于模型整体逼近的机械臂RBF网络自适应控制使得工业机械臂在工作工程中具有更精确的轨迹跟踪控制。控制性能得到了提高,提高了系统的学习速度,因而能够得到较理想的控制效果。
(2)RBF网络自适应控制使得工业机械臂对于外界的干扰具有更高的鲁棒性。
