基于模糊层次分析法-熵权法-博弈论的换刀机器人安全性评估
2022-12-08苏翠侠林赉贶张博文
苏翠侠,林赉贶,张博文
(1.中国铁建重工集团股份有限公司,湖南 长沙 410100;2.中南大学机电工程学院,湖南 长沙 410083)
0 引言
盾构机是集光、机、电、液于一体的大型掘进施工设备[1]。盾构机在掘进过程中,需频繁更换滚刀[2],而人工换刀作业难度大、危险性高[3],因此,利用换刀机器人代替人工换刀已经成为盾构换刀技术新发展趋势[4]。换刀机器人在换刀过程中的安全性评估具有复杂性、模糊性等特点,许多指标难以通过定量方式进行评价,因此需要引入多种评价方法进行风险因素的安全性评估。近年来模糊层次分析法、熵权法等评价方法已经成功应用于盾构机领域[5]。Jafar[6]最先将模糊层次分析法引入到隧道施工评价中。Ebrahimabadi[7]采用模糊层次分析法选择了最适合开挖其工程隧道的隧道掘进机类型。Lin等[8]通过模糊层次分析法、博弈论、熵权法等多种方法相结合完成对盾构机中滚刀性能综合评价。由于换刀机器人属于即将应用在盾构机中的新技术,目前并无学者对其换刀流程的安全性进行评估。
本研究依托中国铁建重工集团股份有限公司研制的换刀机器人和换刀作业工艺,建立换刀机器人换刀安全评价体系,采用模糊层次分析法与熵权法分别计算评估体系中指标权重,采用博弈论对权重计算结果进行优化得到最优权重。利用模糊综合评价,基于R=P×C风险定级模型[9],计算各指标的安全综合评价分数。针对安全综合评价分低的指标,提出针对性的改进措施,保证机器人在实际应用中的安全性。
1 基于模糊层次-熵权法-博弈论的安全性评价模型
1.1 模糊层次分析法
模糊层次分析法通过模糊数学的计算方法的得到各安全指标的权重,主要步骤包括:
(1)建立模糊互补判断矩阵,模糊层次分析法通过将同一层级的指标以上一级指标为准则进行两两比较,通过0.1~0.9数量标度法对各指标的重要程度进行量化,从而建立模糊互补判断矩阵,见表1。

表1 0.1~0.9数量标度法
按照0.1~0.9数量标度法得到的模糊互补判断矩阵如式(1)所示:

其中:aii=0.5,0<aij<1,aij=1-aij。
(2)建立模糊一致判断矩阵,采用行和转换法将模糊互补判断矩阵转化为模糊一致判断矩阵,其具体过程如下:
①对模糊互补判断矩阵的每一行进行求和运算:

②基于每行求和运算的结果ri,利用式(3),进行模糊一致判断矩阵转化:

③利用rij对矩阵完成重构,得到模糊一致判断矩阵R
(3)权重计算,基于模糊一致判断矩阵R,利用式(4)计算各指标的权重:

其中a为线性转换系数:a=(n-1)/2。
1.2 熵权法
熵权法的计算步骤为:
(1)依据所构建的评估指标数据建立原始数据矩阵:
其中下标m代表评价体系中具有m个评价对象,下标n代表有n个评价指标。
(2)数据矩阵的每列进行标准化处理,将指标的绝对值转化为相对值
正向指标:


负向指标:其中正向指标意味着指标值越大,说明指标越优,负向指标反之。
(3)对标准化后的数据矩阵X′进行归一化处理
,计算第j个评价指标的信息熵其中k=1/lnm。

(4)计算第j个指标的熵权
1.3 最优组合权重
为综合模糊层次分析法和熵权法权重计算结果,以避免单一评价方法的片面性,通过博弈论来平衡两种权重计算结果以获取最优权重。其计算步骤为:
设采用L种权重计算方法对评价体系中的n个指标进行权重计算,得到相应的权重向量wk=(wk1,wk2,…,wkn),k=1,2,…,L。设各权重的线性组合为wc。其中ck记作权重组合系数。

通过选取合适的权重组合系数,可以使得wc与wk之间的偏差达到最小。

利用矩阵微分性质和最优化的一阶导数条件,可得

基于式(12)即可解得相应的权重系数,之后对权重系数进行归一化处理可得
,得到组合最优权重为:

1.4 模糊综合评价
其评价方式如下:
(1)根据权重计算结果,建立安全指标集U={u1,u2,…,um},以及建立对应因素的权重集W={w1,w2,…,wm}。
(2)根据项目中的实际情况与专家意见,建立合适的评语集V={v1,v2,…,vn}。
(3)采用三角隶属度函数计算各指标的隶属度,设置ei第i个评价等级的隶属度,e为各评价指标的实际值,为第i个评价等级的上限,为第i个评价等级的下限。为第i个评价指标上限和下限的均值。
当i=1时
当i=2,3,n-1时
当i=n时

(4)确定各指标在评语集合中的隶属度,建立模糊评价向量
将各指标的模糊评价
向量组合建立模糊评价矩阵E。
(5)将所得模糊评价矩阵E与权重向量W进行模糊运算,得到模糊综合评价结果为:

2 换刀机器人安全性评价体系
换刀机器人换刀流程分为:作业请求阶段、作业准备阶段和作业执行阶段3个阶段。在作业请求阶段,磨损检测系统对掘进过程中刀具磨损情况进行检测,通过在盾构机内部设置的无线发送及接收模块,进行数据传输接收。在刀具的磨损程度达到换刀要求后,依据刀具磨损检测系统的位置数据和刀盘旋转编码器数据确认待更换滚刀位置。在作业准备阶段,旋转刀盘将待更换滚刀转到换刀机器人换刀范围内,刀盘停转锁紧。启动开挖仓压力调节系统保证开挖仓压力稳定,并将仓内的土渣泥浆排出,之后启动存储仓压力调节系统,使储存仓与开挖仓内压力相等,确认安全后,依照顺序开闭闸门,准备执行换刀作业。在作业执行阶段,机器人进入开挖仓,机器人运动到待更换滚刀位置,完成刀具安装/拆卸工作,机器人换刀作业具体过程因刀具刀座特点而异。基于换刀机器人换刀流程,建立换刀机器人安全评估体系,如图1所示。

图1 换刀机器人安全评估体系
3 换刀机器人指标权重计算
3.1 模糊层次分析法权重计算
邀请5位相关的行业专家对换刀机器人安全评估体系中的准则层和指标层的指标进行讨论,根据其重要程度进行两两比较,依据专家评价结果建立准则层判断矩阵A,和目标层判断矩阵A1,A2,A3。

利用式(1)-(4)对判断矩阵进行权重计算,分别得到准则层权重与目标层权重。
3.2 熵权法权重计算
从风险发生概率和事故发生后果严重性两个方面对换刀机器人换刀过程指标的安全性进行量化评估,将指标的风险发生概率划分为“几乎不可能发生”“小概率发生”“偶然发生”“很可能发生”“极有可能发生”五个等级,各等级分别对应数值为1-5。将事故发生后果严重性划分为“轻微的”“较轻微的”“严重的”“较严重的”“灾难性的”5个等级,各等级分别对应数值为1-5。邀请6位专家对换刀机器人各指标进行风险发生概率和事故发生后果严重性的进行等级划分,并将最终的等级划分结果转化成数值。
依据表2,表3的指标量化评估结果,构建决策矩阵X1,X2,利用式(5)-(9)计算熵权,由于风险发生概率与事故发生后果严重程度对指标的安全性有着相同程度的影响,因此对两者的权重计算结果取均值,得到利用熵权法计算各指标的最终权重结果。

表2 风险发生概率量化评估

表3 事故发生后果严重性量化评估
3.3 博弈论最优权重计算
基于权重计算结果依据式(10)-(13)得到机器人准则层和指标层的最优权重见表4。
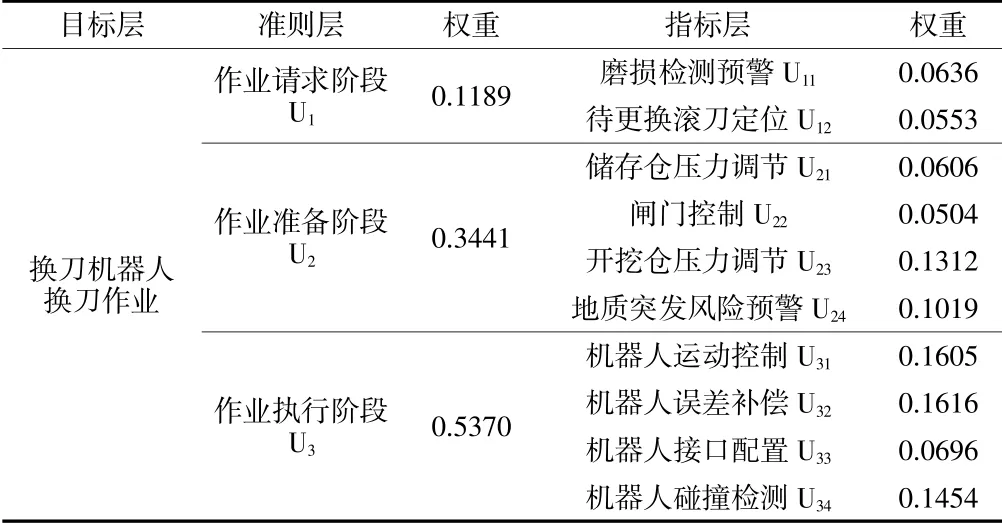
表4 换刀机器人各指标最优权重
4 换刀机器人模糊综合评价
参照换刀机器人指标量化评估中的等级划分,建立风险发生概率评语集V1={V11,V12,V13,V14,V15}={几乎不可能,小概率发生,偶尔发生,很可能发生,极有可能发生}及事故发生后果严重程度评语集V2={V21,V22,V23,V24,V25}={轻微的,较轻微的,严重的,较严重的,灾难性的}。在进行两者的评价过程中,采用相同隶属度函数。以事故发生后果严重程度为例,所得隶属度函数如图2所示。

图2 隶属度函数
分别取风险发生概率及事故发生后果严重性的量化评估结果均值带入隶属度函数,得到两者的评价矩阵。依据定级模型,根据风险发生概率大小以及事故发生后果严重程度,将安全等级划分为安全性低,安全性中,安全性高,安全性极高四个等级,所得R=P×C定级模型见表5。
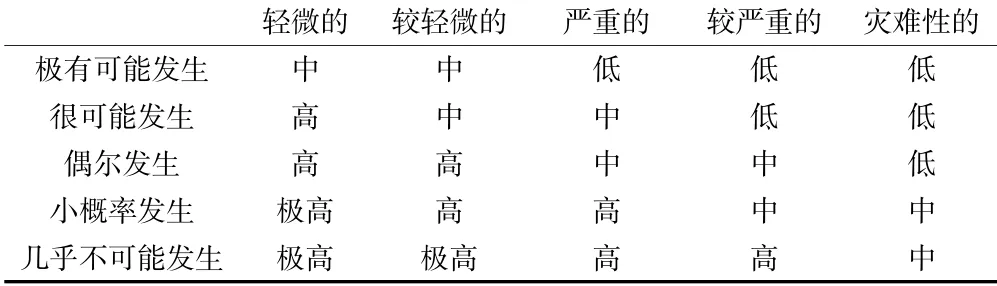
表5 R=P×C定级模型
由此建立安全性评价集合V3={V31,V32,V33,V34}={安全性低,安全性中,安全性高,安全性极高}。其中通过表5,可得:
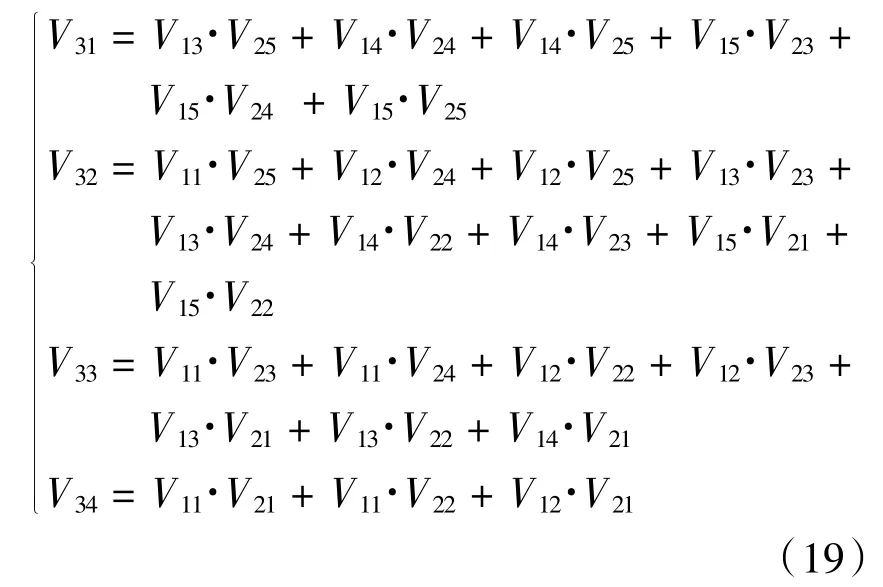
基于指标层风险发生概率及事故发生后果严重性的评价矩阵和式(19),可得指标层安全性评价矩阵E1-1,E1-2,E1-3利用式(18)计算得到准则层及目标层的评价矩阵E2,E3:


为更直观地表现各指标的安全性,设立安全等级分通过各指标的得分情况直接表现其安全程度。
由表6建立安全分数集C=[50,67.5,82.5,95]T,各层次中指标的综合评价分值由式20计算得到:

表6 风险评价表

利用式(20),最终计算得到各指标的综合评价分值为:
依据评价结果,换刀机器人整体换刀流程的安全性处于中等偏上水平。准则层中作业请求阶段的综合评价分值为75.81,属于安全性高的指标。作业准备阶段的综合评价分值为66.88,作业执行阶段的综合评价分值为73.20,这两个阶段的属于安全性中等的指标。在实际工程应用中,当换刀机器人换刀流程处于这两个阶段时应给予重点关注。针对指标层中具体安全评价指标进行进一步分析,其中开挖仓压力调节、地质突发风险预警、机器人接口配置以及机器人碰撞检测这4个指标的综合评价分值分别为62.64,63.61,67.50,69.17其安全等级属于中等偏下。为提高换刀机器人换刀安全性,针对这4个指标提出相应改进措施。
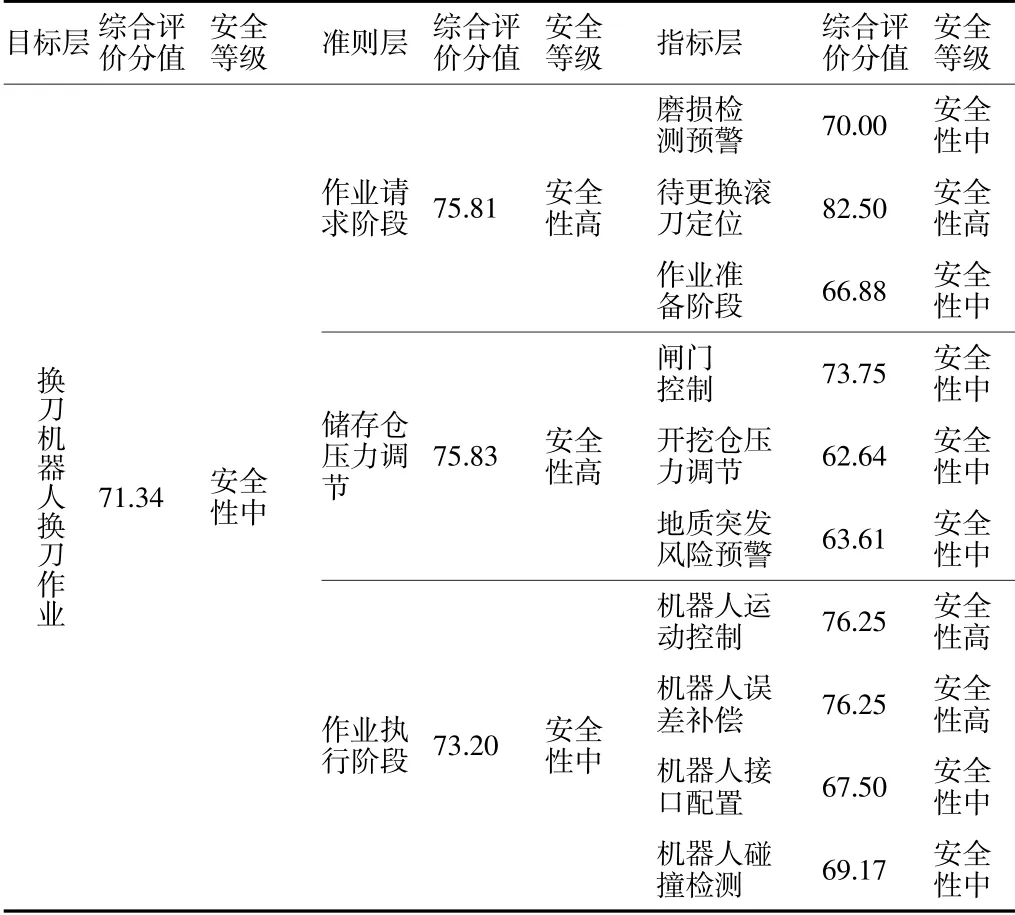
表7 各指标的综合评价分值
对于地质突发风险预警,换刀前要仔细查看地质资料,尽量避免在含水量大、地质稳定性差的地段进行换刀作业,并且机器人需处于全面监控状态,及时对突发地质情况进行预警。针对机器人接口配置,将机器人与储存仓的滑轨部分进行进一步的精密加工,以保证机器人运行流畅性和满足机器人重载要求。在机器人基座中心采用回转接头过渡管线,避免机器人在运动过程中发生管线缠绕现象以及在长时间高频率摩擦中出现的管线破损现象。针对开挖仓压力调节系统,基于压力平衡试验台,采用安全阀,高精度压力表,自力式减压表,截止阀等设备对现有压力平衡系统进行优化设计,最终达到开挖仓内的压力波动范围在bar。在换刀机器人碰撞检测方面,利用虚拟显示技术,将机器人位姿实时的显示在上位机中,实现在能见度低的盾构机内部的换刀可视化,结合机器人中搭载的传感器达到实时检测机器人位姿的目的,从而避免机器人与盾构机的内部结构发生碰撞。
5 结语
基于模糊层次分析法-熵权法-博弈论对换刀机器人换刀过程中安全性评估问题进行了探讨,得到了如下结论:
(1)从换刀机器人换刀流程分析,提出换刀机器人在不同换刀阶段的换刀安全性指标,按照层属关系建立换刀机器人换刀安全性评价体系,全面反应换刀机器人在各阶段可能会发生的安全性问题。
(2)基于模糊层次分析法、熵权法、博弈论方法建立换刀机器人安全性评估模型。通过建立的换刀机器人换刀安全性评价体系,利用模糊层次分析法和熵权法分别计算层次结构中各指标的权重。通过博弈论方法综合两者的权重计算结果,避免单一评价方法的片面性进而得到评价体系中各指标的最优权重。
(3)通过模糊综合评价以及风险定级模型对换刀机器人换刀流程安全性进行评估,得到各指标的安全值,依据评价结果,换刀机器人换刀过程的安全性位于中等等级。针对安全性低的指标:开挖仓压力调节、地质突发风险预警、机器人接口配置和机器人碰撞检测,提出相应优化措施,进一步提高换刀安全性。
