基于多因素安全距离模型的汽车防撞保护系统设计
2022-12-05鲍婷婷雷绍东
牛 磊,鲍婷婷,雷绍东
(浙江交通职业技术学院,杭州 311112)
汽车交通事故频发,造成了重大的生命、财产损失,人们越来越重视汽车的行驶安全问题。汽车防撞保护系统能有效降低交通事故的发生。但是,目前的汽车防撞保护系统存在以下问题[1-7]:
(1)目前汽车主动防撞保护系统的关键是安全距离的设定,汽车防撞保护系统通过计算安全距离来判断是否给驾驶员进行提醒,安全距离的计算未考虑驾驶员的疲劳状态、雨雪和能见度等因素,预警模式单一,存在安全距离设定不适当,预警不准确的缺陷。
(2)当汽车防撞保护系统失效时,一旦碰撞发生,无法保护车辆安全。
为解决上述问题,本文从汽车制动过程的运动学分析入手,研究出多因素安全距离模型,同时设计出基于多因素安全距离模型的汽车防撞保护系统。
1 多因素安全距离模型的研究
1.1 汽车制动过程的运动学分析
汽车制动过程如图1所示。
图1中:反应时间(t1)为驾驶员发现、识别障碍并决定刹车,但没有刹车。移脚时间(t2)为脚从加速踏板换到制动踏板上的时间。制动延迟时间(t3)为驾驶员从踩制动踏板直至实际减速的时间。制动力增长时间(t4)为制动踏板力从零增长至最大需要的时间。制动持续时间(t5)为汽车以最大减速度减速,制动滑行到完全停止。

图1 汽车制动的减速度与时间曲线图
假定汽车的初速度为v1(m/s);最大减速度为a1(m/s2)。汽车的制动距离可描述为以下3个部分。
(1)驾驶员发现、识别障碍并决定刹车直至制动器开始起作用,汽车按照初速度v1匀速运动,汽车驶过的距离为

(2)汽车制动减速度增加时间段驶过的距离为s2,速度为

因此,

(3)制动滑行阶段,即汽车以最大减速度减速,制动滑行到完全停止。假定此时间段的初始速度为v2,此速度也是前一段的末始速度,那么根据式(2)有

根据式(4)有

因此制动滑行距离

根据式(1)、式(3)和式(6)可得汽车紧急制动距离公式为

从式(7)可以看出,汽车紧急制动距离取决于反应时间t1、移脚时间t2、制动延迟时间t3、制动力增长时间t4、汽车的初速度v1和最大减速度a1。把t1和t2合并在一起称为驾驶员延迟时间Td,把t3和t4合并在一起称为系统延迟时间Ts,因此式(7)可改为

1.2 多因素分析
考虑驾驶员的疲劳状态、天气情况和能见度等因素。驾驶员在疲劳状态时注意力不集中,反应迟钝,此时反应时间t1、移脚时间t2都会增加,因此本文引入疲劳状态修正系数α,对驾驶员延迟时间Td修正。当天气情况较差时,比如雨雪天、阴天等,此时能见度下降,驾驶员发现、识别障碍的时间延长,因此本文引入天气状况修正系数β,对驾驶员延迟时间Td修正。因此,考虑到驾驶人的疲劳状态和天气状况等因素,修正后的驾驶员延迟时间为

由式(8)、式(9)可得修正后的汽车紧急制动距离S修为
1.3 多因素安全距离模型
根据需要紧急制动的情况,把多因素加入到安全距离模型中。本文设定前方汽车有3种运动情况,前方汽车停止运动,前方汽车匀速运动,前方汽车减速运动。
1.3.1 前方汽车停止运动
驾驶员发现前方汽车停止运动,然后采取紧急制动直至汽车完全停止。由式(10)可得,此过程后车紧急制动距离为

因为这个过程前车处于静止状态,所以两车的安全距离由后车紧急制动距离决定,由式(11)可得,安全距离D为

式中:D0为两车相对静止时的距离。
1.3.2 前方汽车匀速运动
前方汽车匀速运动,同时后方汽车也匀速运动。当前车速度小于后车时,两车距离不断减小,如果不采取任何措施,当两车相对距离为0时就会发生碰撞。因此,本文研究的是前车速度小于后车的情况。后车的制动过程经历3个时间阶段:驾驶员延迟时间Td修、系统延迟时间Ts和以最大减速度为a1滑行减速直至达到与前车同速的时间Ta,分别对应的行驶路程为

式中:v前为前车的速度
在上述3个时间段中,前车行驶的路程为

为确保两车不碰撞,设定安全距离为D,那么有

1.3.3 前方汽车减速运动
当前方汽车减速运动时,前方汽车的速度小于后车汽车速度,如果不采取任何措施就会发生碰撞。两车避免碰撞的前提是两车的间距为D0时,后车的速度小于等于前车的速度。
后车的制动过程经历3个时间阶段:驾驶员延迟时间Td修、系统延迟时间Ts和以最大减速度a1滑行减速直至小于等于前车速度(此时两车速度均为v),分别对应的行驶路程为

在上述3个时间段中前车行驶的路程为

式中:v前为前车的初始速度。
为确保两车不碰撞,设定安全距离为D,那么有

2 多因素安全距离模型下防撞保护系统的搭建
由本文构造的多因素安全距离模型可知,多因素安全距离模型要融入到防撞保护系统中,关键是确定驾驶员延迟时间Td修。而Td修取决于疲劳状态修正系数α和天气状况修正系数β。疲劳状态修正系数α可通过采集驾驶员的疲劳信息获得。天气状况修正系数β可通过采集天气信息获得。如图2所示。
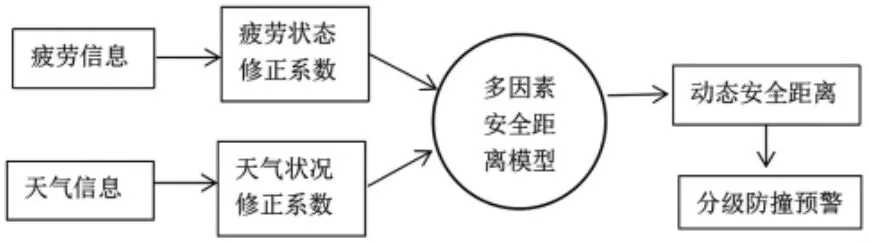
图2 多因素安全距离模型下防撞保护系统的框架
3 多因素安全距离模型下的方案设计
3.1 总体方案设计
本文设计的汽车防撞保护系统依据多因素安全距离模型计算安全距离,并能动态调整安全距离,包括汽车防撞分级预警系统、防撞快速响应系统和缓冲系统。汽车防撞分级预警系统包括疲劳分级模块和防撞检测模块、安全距离模块、安全距离修正模块和分级预警模块。汽车防撞分级预警系统综合分析驾驶员的疲劳状态、雨雪和能见度等因素,实时调整安全距离,根据不同的安全距离和驾驶员疲劳状态采取4种不同的预警策略,能对驾驶员进行分级预警。防撞快速响应系统包括碰撞感应模块和应急制动模块。当汽车防撞分级预警系统失效时,一旦发生碰撞,防撞快速响应系统开始工作,碰撞感应模块和应急制动模块将发挥作用,对车辆采取应急制动。同时,缓冲系统缓解碰撞时的冲击,一方面有利于碰撞感应模块精准地感应到冲击力,另一方面可以降低汽车碰撞时的损伤。
3.2 具体方案设计
如图3所示,汽车防撞分级预警系统包括疲劳分级模块、防撞检测模块、安全距离模块、安全距离修正模块和分级预警模块。
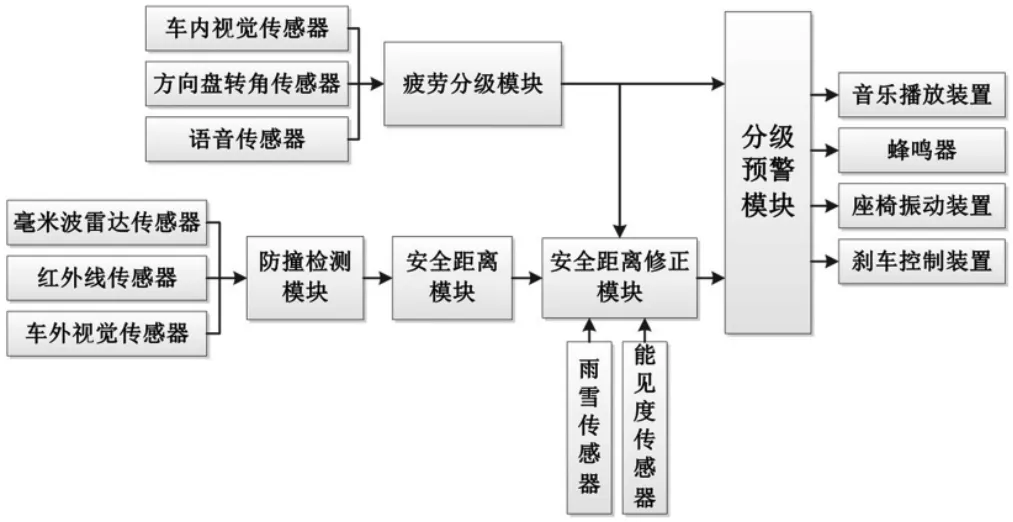
图3 汽车防撞分级预警系统工作示意图
疲劳分级模块融合车内视觉传感器、方向盘转角传感器和语音传感器的信息。车内视觉传感器接收驾驶员面部特征信息,方向盘转角传感器接收方向盘转角信息,语音传感器接收驾驶员语音信息。上述传感器信息汇总给疲劳分级模块,从而使疲劳分级模块获得驾驶员的疲劳状态。
防撞检测模块融合毫米波雷达传感器、红外线传感器和车外视觉传感器的信息,从而获得前方行人、车辆,障碍物的位置、距离和速度等信息,并将这些信息传递给安全距离模块。
安全距离修正模块接收安全距离模块、疲劳分级模块、雨雪传感器和能见度传感器的信息,在综合分析驾驶员的疲劳状态、雨雪和能见度等因素的情况下计算出动态安全距离。
分级预警模块接收疲劳分级模块和安全距离修正模块的信息,综合分析雨雪、能见度和疲劳状态等因素,实时调整安全距离,根据不同的安全距离和驾驶员疲劳状态采取4种不同的预警策略,这4种预警由弱到强分别是:播放音乐、蜂鸣器报警、座椅振动、刹车控制,从而对驾驶员进行分级预警,有效地提高了行车安全。
当汽车防撞分级预警系统失效时,一旦发生碰撞,防撞快速响应系统开始工作。
如图4所示,防撞快速响应系统包括碰撞感应模块和应急制动模块。当碰撞发生时,碰撞感应模块受到碰撞的冲击力,当冲击力达到一定值时,碰撞感应模块产生感应信号,此信号传递给应急制动模块,应急制动模块接到信息后立刻对车辆采取应急制动。

图4 防撞快速响应系统工作示意图
如图5所示,缓冲系统的作用是缓解碰撞时的冲击力,一方面有利于碰撞感应模块精准地感应到冲击力,因为当冲击力变化缓慢时,碰撞感应模块更容易捕捉到冲击力,另一方面可以降低汽车碰撞时的损伤。缓冲系统的核心部件为橡胶件和液压减震器,橡胶件和液压减震器并联连接。两者安装在汽车前防撞梁和车身之间,从而使前防撞梁和车身之间弹性连接。一旦发生碰撞,前防撞梁受到冲击力,此力通过橡胶件传递给车身,由于橡胶件的本质是一个弹性元件,受到冲击后发生变形,吸收冲击带来的能量,从而减少碰撞给车身带来的冲击。但是,碰撞一旦终止,橡胶件吸收的能量就要释放,即发生反弹,反弹作用在车辆上,这样相当于发生了二次碰撞。此时液压减震器阻止橡胶件反弹,液压减震器本质为阻尼器,当橡胶件压缩时,其几乎不起任何作用,当橡胶件反弹时,其内部产生阻尼力,阻碍橡胶件反弹,吸收橡胶件释放的能量,以热量的形式散出。

图5 缓冲系统工作示意图
4 结束语
本文在综合考虑驾驶员的疲劳状态、雨雪和能见度等因素的情况下,构建基于多因素的安全距离模型,根据此模型设计一种基于多因素的安全距离模型的汽车防撞保护系统,采取4种不同的预警策略,克服了常规预警模式单一,安全距离设定不适当的缺点,预警准确,有效地提高了行车安全。当汽车防撞分级预警系统失效时,一旦发生碰撞,防撞快速响应系统和缓冲系统将发挥作用,保护车辆安全。
