基于网络摄像与互联网技术的智能测量系统设计
2022-12-02胡克用朱佳伟曹世华
胡克用,朱佳伟,谢 奥,曹世华,安 群
(1.杭州师范大学 钱江学院,浙江 杭州 310018;2.杭州师范大学 工学院,浙江 杭州 310018)
0 引 言
随着网络摄像技术、机器视觉技术的高速发展和处理器性能的提升,测量系统的智能化程度越来越高[1]。越来越多的智能测量系统逐渐涌现,它们多采用机器视觉技术通过摄像机将静态的观察目标转换为数字图像信号,再由图像处理系统处理图像数据并提取其中的信息[2]。这种方式局限性较大,对于运动中观察目标的测量结果偏差较大甚至无法测量。针对此类问题,提出一种基于网络摄像与互联网技术的智能测量系统。针对单摆运动中的被测物,使用机器视觉的处理方法通过网络摄像机拍摄其单摆运动状态,借助树莓派、以太网交换机、实时流协议(Real Time Streaming Protocol,RTSP)来获取网络摄像机视频流。
1 系统总体设计
基于网络摄像与互联网技术的智能测量系统结构如图1所示。
系统使用2个正交拍摄被测物的网络摄像机模块、1个以太网交换机模块、3个树莓派模块(节点树莓派A、节点树莓派B、终端树莓派C)、2个液晶显示器(Lipuid Crystal Display,LCD)(分别连接节点树莓派A和节点树莓派B)以及1个终端显示器(使用数据线与终端树莓派C连接)。采用外部供电方法,供电给网络摄像机,树莓派、以太网交换机以及终端显示器。2台网络摄像机将拍摄到的视频传输至以太网交换机,树莓派通过以太网交换机来获取网络摄像机视频流。节点树莓派驱动LCD显示屏,可以实时显示当前树莓派拍摄的视频,终端树莓派C运行OpenCV程序,对摆动的物体进行实时追踪,记录运动轨迹,用方框实时框住被测物体轮廓,并在显示器中呈现出所测量的长度与角度等参量。
2 系统主要硬件设计
2.1 处理器
本设计使用的核心处理器为树莓派,采用Linux作为操作系统。树莓派可以通过USB端口连接显示器、键盘、鼠标,通过RJ45以太网端口连接交换机,这样就具备了普通电脑的基本功能,能执行传输数据、数据处理、播放网络摄像机拍摄的高清视频等功能。
2.2 网络摄像机
由于网络摄像机(IP Camera,IPC)具有比普通摄像机画质清晰、压缩比高、可直接连交换机且性能稳定等优势,因此本设计中使用海康威视的网络摄像机。
2.3 以太网交换机
以太网交换机是用来构建局域网传输数据的重要硬件设备,本设计使用5口百兆以太网交换机,网络摄像机利用网线连接至以太网交换机的RJ45端口。树莓派也是利用网线连接至以太网交换机的RJ45端口,这样以太网交换机上电启动后,局域网也就构建完成。
3 系统软件设计
3.1 节点树莓派程序设计
节点树莓派A、B分别对网络摄像机A、B拍摄得到的视频流进行HSV转化,即从RGB空间转化至HSV空间[3]。HSV空间中:H代表色相角,范围是0°~360°;S代表饱和度,范围是0~1;V代表亮度,范围是0~1。RGB空间中:R代表红坐标值,范围为0~255的实数;G代表绿坐标值,范围为0~255的实数;B代表蓝坐标值,范围为0~255的实数。(R,G,B)构成RGB坐标,在RGB空间中表示所有颜色。RGB空间转化至HSV空间时,转化公式为
色相角H计算公式为
饱和度S计算公式为
亮度V计算公式为
式中:(R',G',B')分别是(R,G,B)二值化后的数值;Cmax表示(R',G',B')中的最大值;Cmin表示(R',G',B')中的最小值;Δ表示Cmax与Cmin之间的差值。
通过HSV转化后进行HSV二值化,然后需要进行图像滤波。滤波方法采用卡尔曼滤波,使用递归的思想来解决线性的滤波问题,只要获得系统当前的测量值与前一个采样周期的估计值,就可以开展状态估计工作[4]。滤波结束后,测量系统开始寻找被测物,分别对2个网络摄像机所拍摄的视频流采用色域检测法来寻找被测物的位置。程序中设定被测物的色域范围,将被测物用矩形框框选出来,确定被测物的中心坐标,逐帧处理并记录坐标的移动轨迹,进而绘制摆幅的范围[5]。
3.2 终端树莓派程序设计
在同一个网络摄像机拍摄的视频中,逐帧对比前后中心坐标的高度,直到发现被测物摆动到右侧的最高位置,记录坐标及当前时间t1,使用同样的方法寻找被测物摆动到左侧的最高位置,记录坐标位置及当前时间t2。同理,对另一个网络摄像机拍摄的视频进行相同操作,记录右侧最高点坐标及时间t3,记录左侧最高点坐标及时间t4,结束后开始向终端树莓派传输预处理后的数据信息。终端树莓派C需要完成接收节点树莓派发送的信息,并计算位于单摆运动中的绳长L与摆动角度θ等。
根据上一流程获得物体在单摆运动中的摆动周期T=2(t2-t1)或T=2(t4-t3),根据单摆周期公式求出细绳长度。
根据节点树莓派发送的数据,整理出网络摄像机在A方向拍摄的左侧最高点坐标(Ax,Ay),通过θ=[arctan(Ax/Bx)×180]/π得到A方向上的角度。
4 硬件环境搭建
本设计的硬件实验环境如图2所示。以太网交换机、网络摄像机与树莓派之间组成一个局域网,网络摄像机上的信息可通过以太网交换机传输到互联网中,树莓派可通过RTSP等协议接收网络摄像机所拍摄到的视频,便捷地在各类可以联网的设备上获取信息并进行分析。
5 系统测试
5.1 终端显示
系统终端实际运行结果如图3所示,可以实时显示被测物运动状态,并用方框框选出被测物。
图3中的数字“1 036.0,574.5”表示当前方框的中心坐标位置,数字“45”表示摆动角度,数字“85”表示悬挂被测物的细绳长度。该系统运行稳定,符合设计要求。
5.2 长度测量
通过对绳长的测量,本系统测量的准确度较高。当角度分别控制在30°和90°时,长度测试误差均在0.5~2.9 cm。实验结果如表1、表2所示。
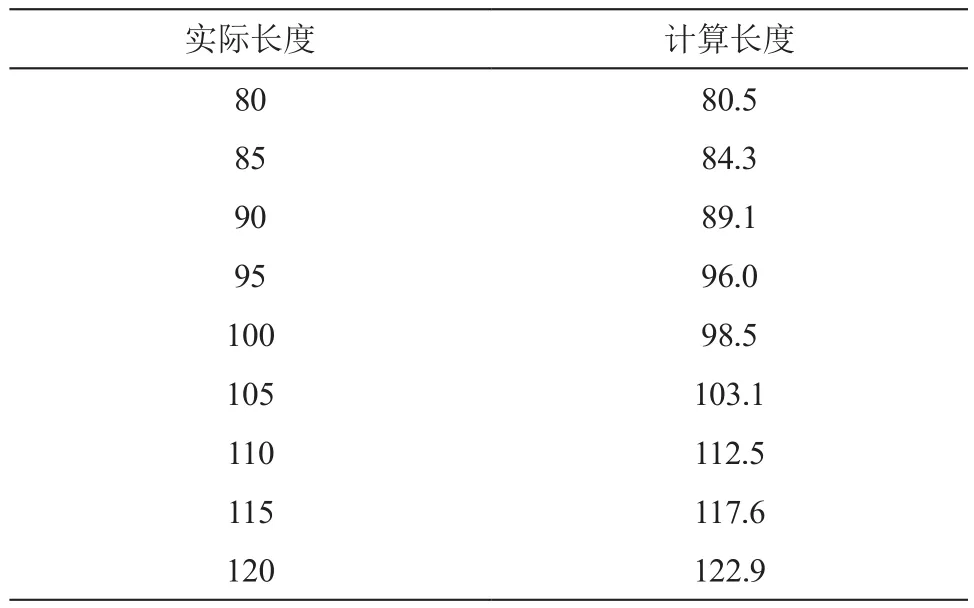
表1 被测物摆动角度为30°时的细绳长度测量结果 单位:cm
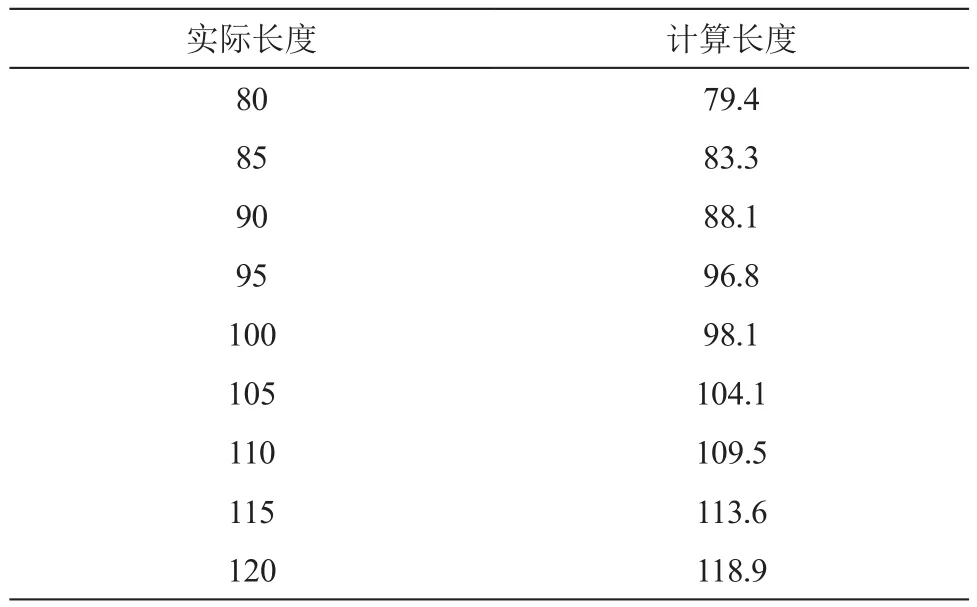
表2 被测物摆动角度为90°时的细绳长度测量结果 单位:cm
5.3 角度测量
当细绳长度控制在90 cm时,实验结果如表3所示,被测物摆动角度测试误差在0.6°~3.2°。
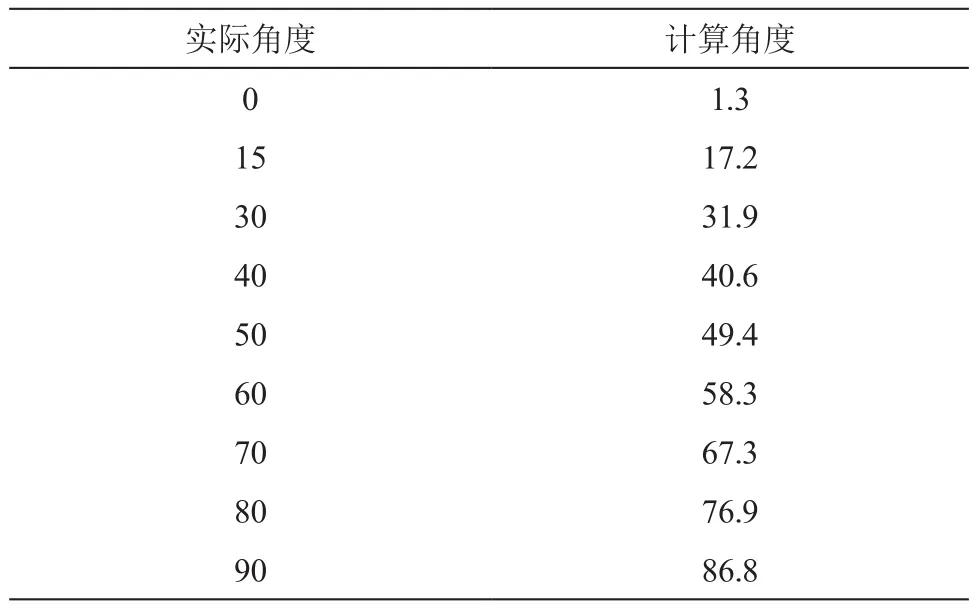
表3 被测物摆动角度测量结果 单位:(°)
通过对摆动角度的测量,本系统测量的准确度较高。
6 结 论
基于网络摄像与互联网技术的智能测量系统利用机器视觉的方法对处于单摆运动中的被测物实时追踪,显示并计算绳长与摆动角度,处理器采用树莓派,性能稳定且成本低。经过实验分析,这种对动态目标检测的系统能够满足未来智能测量的需求,具有广阔的发展前景。
