基于微观换道的高速公路双车道出口辅助车道长度研究
2022-12-01潘兵宏马朝辉谢振江
潘兵宏,王 潮,王 俏,马朝辉,谢振江
(1.长安大学公路学院,陕西 西安 710064;2.湖南省交通规划勘察设计院有限公司,湖南 长沙 410200;3.保利长大工程有限公司,广东 广州 510000)
在高速公路互通式立交(以下简称高速互通)范围内,分流区极易发生交通事故。据美国相关研究表明,高速互通分流区交通事故占高速公路总事故的50%,我国高速公路事故统计资料显示,该比例超过40%[1]。为安全顺利实现分流区的车速变换,在驶出车辆较多的双车道出口匝道前设置辅助车道是一项有效的措施。Shea等[2]收集了大量相关数据,分别使用负二项回归模型和多项Logit回归模型估计匝道间距和辅助车道存在对期望碰撞频率和碰撞严重程度的影响,认为设置辅助车道能够降低碰撞频率。Chen[3]等根据匝道车道数和同主线连接形式的不同,将分流区分为4种类型,分析了每种类型分流区的安全水平,验证了主线与分流区车道数平衡的匝道类型安全水平更高。因辅助车道长度是影响驾驶人驾驶行为的重要因素之一,目前我国高速互通出口存在较多影响交通安全的问题,如驾驶人猛打方向突然变道、临近出口强行超车、连续变道抢行、误出车辆强行返回、违停看导航等,这些均与辅助车道长度过短有直接或间接联系。
美国《公路与城市道路几何设计》[4]和日本《高速公路设计要领》[5]指出,分流区要考虑驾驶人心理因素、对出口的确认以及适时变换车道等情况,因而需要设置较长的辅助车道。美国将辅助车道定义为用来平衡出口段交通荷载,使公路保持更均衡的服务水平,便于驾驶人在出口处准确定位,为提高双车道出口全部通行能力的附加车道,其规定出口匝道辅助车道长度为726~1 066.8 m。日本认为出口辅助车道长度应同确认标志、心理准备、车道横移、反应时间联系起来,将渐变段和减速段包含在辅助车道之内,其规定出口辅助车道在分流部分理想的标准值为1 000 m,最小值为600 m。两国对辅助车道范围的界定均为分流渐变段起点至分流鼻端的部分。
我国对辅助车道的界定同国外存在明显差异,《公路路线设计规范》(JTG D20—2017)[6](以下简称《路线规范》)规定辅助车道范围为分流渐变段终点至分流点,同时规定了不同主线设计速度下辅助车道长度的最小值和一般值,《路线规范》条文解释中指出:“最小值保留原规范(指2006版《路线规范》)的数值,一般值则是按流出部分的变速车道与辅助车道长度之和,不小于合流部分的两者之和的原则计算而得”,且条文解释说“《规范》(2006)中出口匝道的辅助车道长度偏短”。但《路线规范》中仍采用了2006版《路线规范》中的值作为最小值,因此存在着自相矛盾问题。且《路线规范》2017版和2006版中均没有说明规定辅助车道最小长度的基本原理,缺乏理论依据,因而在实际工程中也无法灵活运用。《公路立体交叉设计细则》(JTG/T D21—2014)[7](以下简称《立交细则》)中给出的双车道出口辅助车道长度为《路线规范》中的最小值,也未解释规定值的制定原理。因此有必要深入研究辅助车道长度制定的基本原理,并提出合理的长度,为灵活运用技术指标提供支撑。由于《立交细则》中规定双车道出口匝道宜采用直接式,且目前我国大部分双车道出口均采用直接式设计,因此本文仅针对双车道直接式辅助车道展开研究。
在车辆换道行为研究方面,Sun等[8]基于驾驶人驾驶状态将自由换道过程划分为目标车道选择阶段,可接受间隙选择阶段和换道执行三个阶段。Hill等[9]通过采集46名驾驶人换道行为,根据聚类分析探索了驾驶人类型、换道与间隙接受行为之间的关系。马小龙等[10]采用2台无人机拍摄高速公路基本路段交通流,得到了换道时间和距离的分布特性。
在辅助车道长度研究方面,Wang等[11]针对不同主线交通量和出口匝道交通量,提出了C级服务水平下辅助车道长度最小长度,但其只分析了单车道出口匝道,未考虑双车道匝道的情况。目前国内对于辅助车道长度的研究主要集中在城市道路、合流区与复合式立交方面,对一般分流区辅助车道长度研究较少。
综上,换道行为作为高速公路辅助车道路段的最本质的交通流微特征,此前相关研究并未从此角度开展。为此,本文将考虑高速互通分流区车辆的运行状态和驾驶人的换道驾驶行为,建立基于微观换道行为的分流区辅助车道长度计算模型,并确定合理辅助车道长度。
1 辅助车道范围车辆轨迹数据采集和处理
1.1 轨迹数据采集
为了获取大范围的车辆轨迹数据,采用大疆DJI Air2s无人机采集辅助车道路段大于200 m路段车辆运行的视频。选取3条基本车道数不同的代表性高速公路出口(表1),于2021年8月17—19日09:00—10:30采集原始交通流视频数据(图1),在拍摄过程中天气晴朗、风力较小,拍摄路段内标志标线设置完整。

图1 连霍高速视频中某帧画面Fig.1 A frame in the video of Lianhuo Expressway

表1 调查路段基本资料Tab.1 Basic information of surveyed section
为获取车辆轨迹精确坐标,在拍摄路段附近选取几处地标点,采用实时动态测量(RTK)获取地标点的世界坐标,以地标点为基准建立世界坐标系。以下以连霍高速为例说明数据处理的过程和方法。
1.2 轨迹数据预处理
基于YOLOv3目标检测算法[12],利用已训练完成的车辆检测模型对视频进行逐帧分析,提取车辆编号、世界x和y坐标、车型、速度等一系列车辆运行数据,将每辆车世界x和y坐标逐次相连得到了车辆初始轨迹图(图2)。

图2 初始轨迹图Fig.2 Initial trajectory
本文研究对象为高速公路出口辅助车道,首先需剔除对向合流区数据。经过初步筛选之后,发现初始轨迹图中的一些轨迹数据仍然存在明显异常,对其处理方式如下:
(1)部分轨迹的起终点距离不超过100 m,对比检测视频发现道路标线被纳入检测范围之内,该类数据应舍弃。
(2)删除停靠在硬路肩上的车辆轨迹数据。
(3)对车辆轨迹中的每一帧进行遍历,若某一帧的x坐标小于上帧,则剔除该帧的数据。
按照上述方式处理后,得到连霍高速公路调查路段符合要求的轨迹450条,以车长6 m为大小型车的分界,进而得到362条小型车轨迹,88条大型车轨迹。
1.3 卡尔曼滤波
在无人机高空视角下,车辆在画面中的像素占比较小,可能会出现漏帧,识别错误等情况。为了尽可能减小测量偏差影响,获得真实轨迹最优估计,采用卡尔曼滤波对轨迹数据进行处理与分析,如式(1)所示。
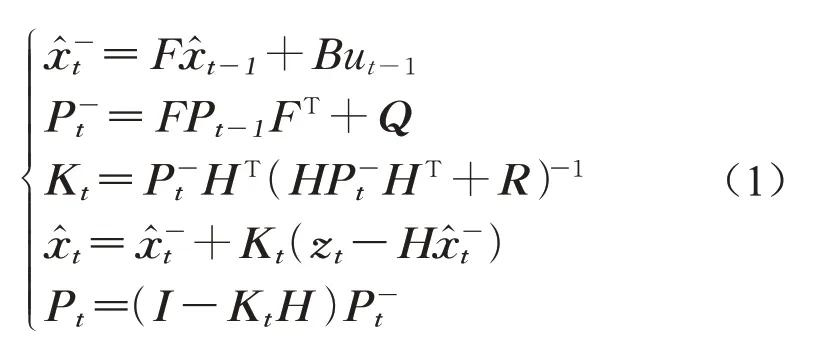
式中:为t时刻系统状态预测值;F和B为状态转移矩阵;为t时刻系统状态最优估计值;ut为t时刻加速度;P-t为t时刻协方差估计矩阵;Pt为t时刻协方差最优估计矩阵;Q为预测噪声协方差矩阵;Kt为卡尔曼系数;H为观测矩阵;R为观测噪声协方差矩阵;zt为t时刻位置测量值;I为单位阵。
采用三维向量来描述系统状态,则t时刻系统状态x(t)=(xt yt vt)T(图3),其中xt为世界x坐标、yt为世界y坐标,vt为速度,θt为速度偏角,状态转移方程如式(2)所示。

图3 状态转移示意图Fig.3 Diagram of state transfer
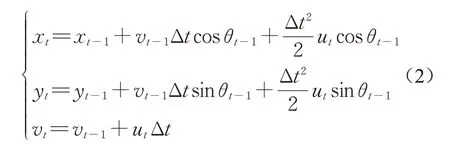
式中:Δt为t时刻与t-1时刻的绝对时间差,s。
由于无人机航拍视频帧率为30帧·s-1,故假定相邻两帧过程中加速度ut恒为零,由此得到状态转移方程矩阵表达形式如下:

采用最小二乘法对每辆车轨迹曲线进行三次多项式拟合得到y(x),将拟合曲线作为卡尔曼滤波预测曲线,则速度方向在每一时刻均相切于当前行驶轨迹,由此可求得速度偏角表达式:

1.4 坐标转换
对于曲线路段,Frenet坐标系[13]能够更加直观地体现车辆在道路上的位置,其s坐标表示沿道路的纵向距离,l坐标表示垂直于道路的横向距离(图4),选定辅助车道外侧边缘线为道路参考线,采用圆曲线拟合实测路段的平面线形,拟合半径为8 482.875 m,由此建立计算模型如式(5)所示。

图4 坐标转换Fig.4 Coordinate conversion

式中:(x0,y0)为道路参考线起点坐标,此处为渐变段起点处;(m,n)为圆心坐标;(xt,yt)为t时刻车辆坐标;(xr,yr)为车辆距离道路参考线的最近点坐标;k0为参考线起点与圆心连线的斜率;kt为t时刻车辆位置与圆心连线的斜率;α为车辆位置与参考线起点的夹角,(°);R为道路参考线的半径,m;s为车辆在Frenet坐标系下的纵向运动距离,m;l为车辆在Frenet坐标系下相对于道路参考线的横向偏移距离,m。
2 辅助车道路段车辆换道行为分析
2.1 换道位置
在分流区辅助车道路段,换道行为主要发生在与辅助车道的相邻车道至辅助车道之间,以右换道行为为主,筛选后共得到246条右换道轨迹。将车辆到达车道分界标线的位置定义为换道位置,其分布统计结果如图5所示,可见驾驶人偏好的换道位置在辅助车道起点与终点附近。由于拍摄路段渐变段长度均为65 m左右,因此当换道位置与渐变段起点距离在0~65 m范围内时,认为换道决策点在渐变段起点处;当该距离在65~150 m范围内时,认为换道决策点在辅助车道起点处。换道决策点在辅助车道起点之前的车辆约占换道车辆总数的65%,这说明大部分车辆在辅助车道之前已产生了明确的换道意图。
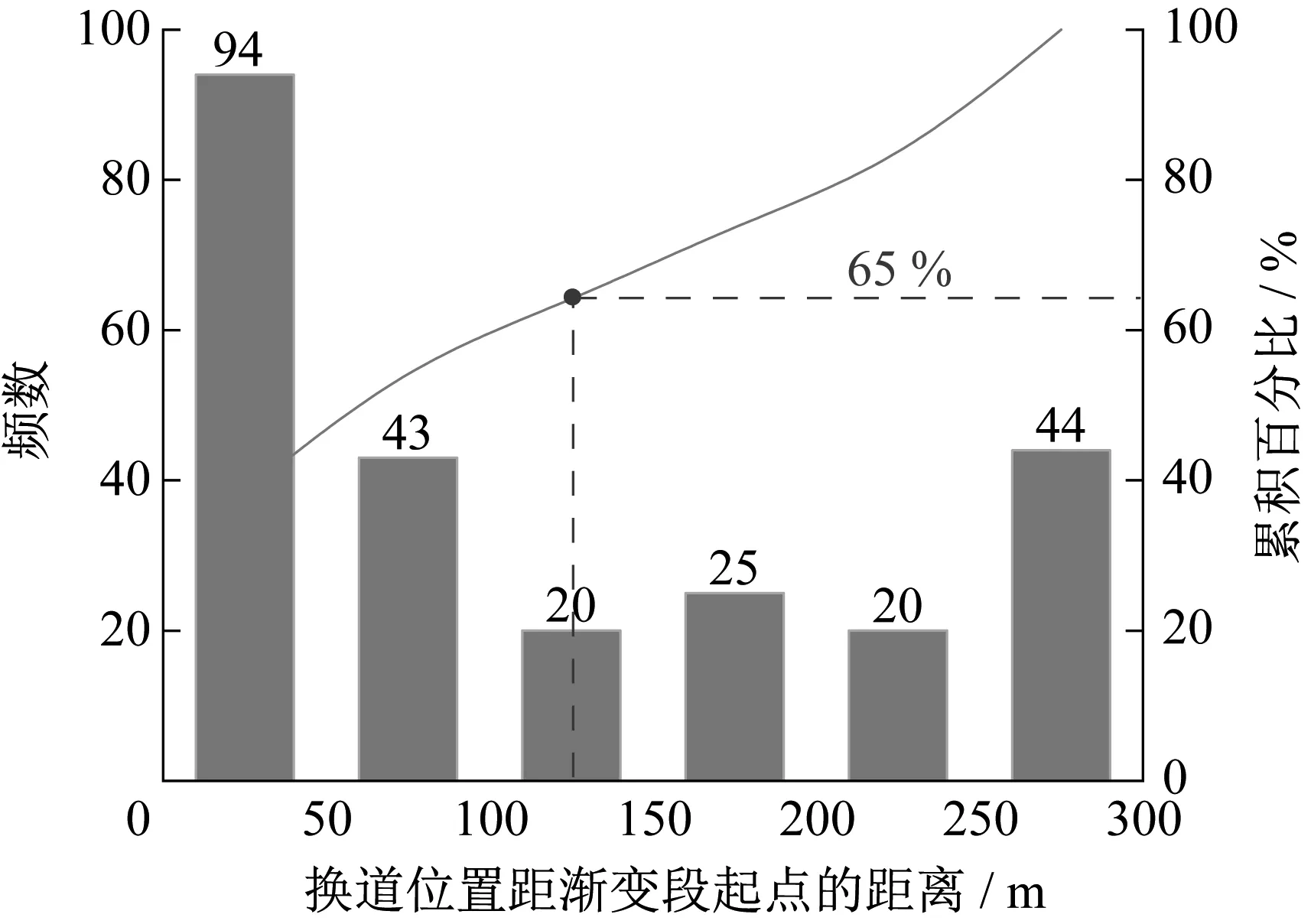
图5 换道位置分布图Fig.5 Distribution of change lane location
2.2 换道轨迹
对视频中车辆换道起终点采用人工识别的方法,将车头开始与车道线产生夹角的时刻定义为换道起始时刻,到达目标车道后车头再次与车道线平行的时刻为换道终止时刻,记录两个时刻的帧号。连霍高速辅助车道路段左、右换道时间和宽度的统计分布如图6和图7所示。其中92组右换道平均换道时间为5.58 s,平均换道宽度为3.31 m;68组左换道平均换道时间为5.48 s,平均换道宽度为3.04 m;且左、右换道时间和换道宽度均服从正态分布,说明数据具有统计学上的意义。
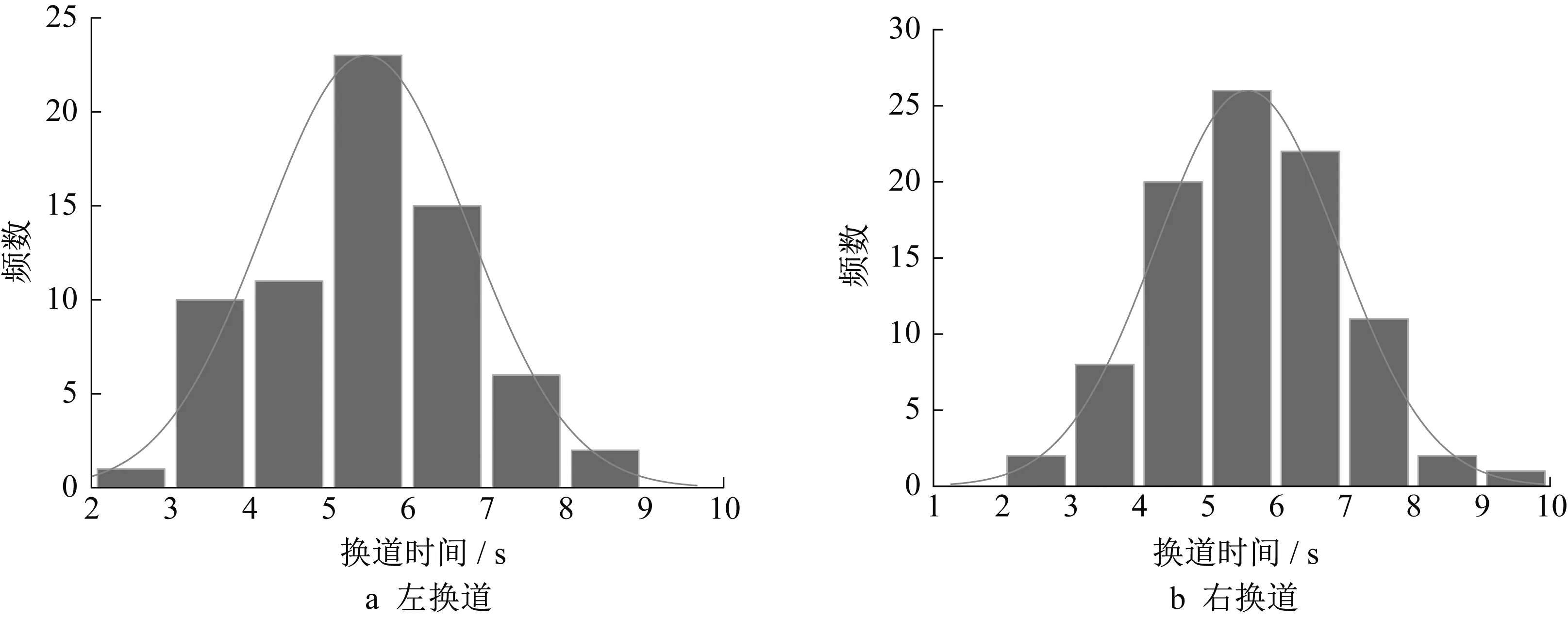
图6 换道时间分布Fig.6 Distribution of change lane time
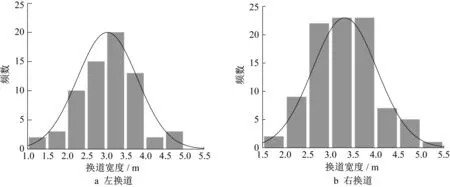
图7 换道宽度分布Fig.7 Distribution of change lane width
目前,较常用的换道模型[14]包括等速偏移模型、圆直模型、缓和曲线模型、余弦函数模型、样条插值模型。相较上述5种模型,双曲正切函数换道模型[15]能够体现换道车辆的横向位置随时间变化的情况,其曲率连续,且模型中包含换道紧急程度的参数,能够准确地描述出口不同车辆的换道特性。但该模型经拟合后的换道宽度与实际换道宽度存在差异,因此本文考虑宽度边界条件对模型进行修正,修正后数学模型如式(6)—(7)所示:
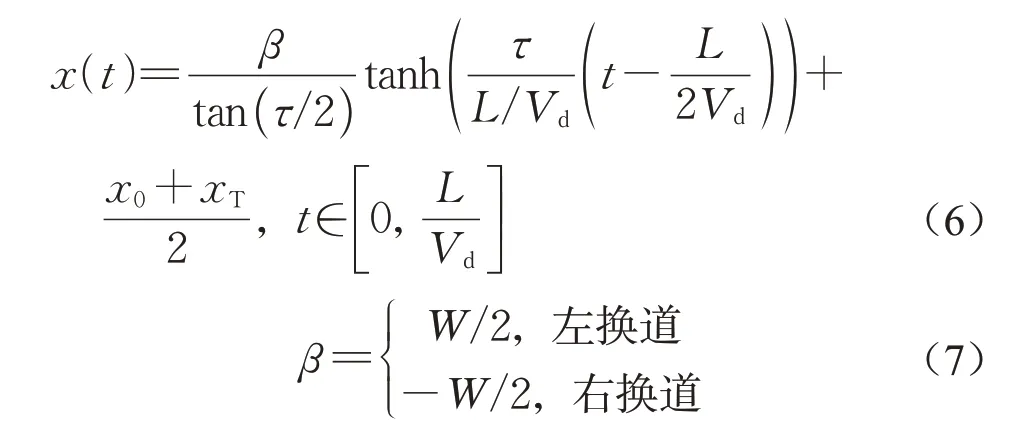
式中:x(t)为换道过程中的横向位置;β为换道横向距离,m,与左、右换道相关;W为换道宽度,m;L为换道长度,m;τ为表征换道紧急情况的系数;Vd为所在车道纵向平均速度,m·s-1;x0和xT分别为换道起终点相对于车道线的横向位置,m。
汇总所有换道轨迹的换道时间、换道宽度、换道紧急系数以及拟合优度均值列于表2。

表2 换道轨迹参数Tab.2 Parameters of lane change trajectory
在显著性水平0.01下,对同一换道类型下的不同调查路段分别两两进行多独立样本T检验,检验结果见表3。
由表3可知,西兴高速的右换道宽度显著偏小;西兴高速与连霍高速左换道时间具有显著差异;其余换道参数无显著差异。当辅助车道较长时,驾驶人在开始换道之前有充足距离调整车辆在车道中的行驶位置,使车辆接近车道右侧边缘线,随后开始换道,采用较短的换道宽度提高驾驶舒适性。换道时间与路段运行速度存在联系,因此当运行速度差异较大时,换道时间显著性检验p值较低。换道紧急系数τ对长度计算结果有显著影响,T检验结果表明不同辅助车道长度下紧急系数τ并无显著差异,因此调查路段辅助车道长度对最终计算结果无显著影响。

表3 换道参数T检验结果(p值)Tab.3 T-test results of lane change parameters(pvalue)
采用该模型对处理后的所有换道轨迹数据逐一拟合,然后进行坐标归一化处理(图8)。拟合结果显示,右换道R2均值为97.62 %,左换道R2均值为97.48%,且每条轨迹的R2值均大于90%,说明采用修正双曲正切函数换道模型来表征辅助车道范围内的换道轨迹具有较高的可信度。
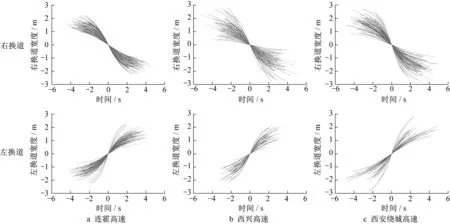
图8 换道轨迹拟合图Fig.8 Fitting of lane change trajectory
2.3 辅助车道范围内车型运行速度分布特征
选取分流点前0、40、80、120、160 m五处断面提取辅助车道运行速度,此时65%的车辆已完全换道至辅助车道。3条不同车道数高速公路的辅助车道范围内车辆运行速度分布统计如图9所示,其中下x轴表示不同断面,上x轴为不同车型的运行速度V85统计结果。

图9 辅助车道断面速度分布Fig.9 Distribution of cross-sectional speed of auxiliary lane
经对比,发现在辅助车道范围内客车和货车的运行速度随基本车道数增加而减小,当主线为单向4车道时,这种现象尤为明显,这是由于单向4车道高速公路交通量较大,分流车辆多,在仅有一条辅助车道的情况下,通行能力有所降低,导致运行速度降低。对于同一路段而言,当车辆进入辅助车道后,其速度基本保持稳定,故取4个断面运行速度均值作为辅助车道运行速度,如表4所示。

表4 辅助车道运行速度(取整)Tab.4 Operating speed of auxiliary lane(round up)
3 高速互通双车道出口辅助车道长度
3.1 基于微观换道行为的辅助车道长度计算模型
车辆换道进入辅助车道后,其行驶轨迹有如下两种:①继续向前行驶至减速车道,减速并驶出;②发现错路运行,向左换道重新汇入主线直行。
对于情况①,车辆继续行驶均能正常完成分流;对于情况②,从车辆行驶的安全性、保障分流区的交通流连续运行的角度考虑,应满足该情况下误行车辆也能顺利汇入主线,且这种情况要求的辅助车道长度更长,因此辅助车道长度的计算应基于情况②确定。由于辅助车道交通量远小于主线交通量,故车辆右换道不考虑等待距离。当车辆进入辅助车道后,需要给予驾驶人一定的标志判读距离,避免其在临近匝道出口时紧急变道。另外对于标志识读之后采取二次换道回归主线的车辆,则应给予一定长度的距离以满足其左换道需求。
基于以上分析,情况②下所需的辅助车道长度应满足右换道距离、反应距离、等待距离和左换道距离四过程(图10),因而辅助车道最小长度计算模型如下:
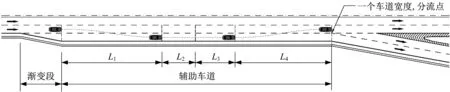
图10 高速公路双车道出口辅助车道长度组成Fig.10 Length composition of auxiliary lanes in expressway diversion area

式中:La为辅助车道最小长度,m;L1为右换道距离,m;L2为反应距离,m;L3为等待距离,m;L4为左换道距离,m。
3.1.1 换道距离L1、L4
基于修正双曲正切函数换道模型,考虑车辆横向行驶特性,式(6)对换道时间t求一阶导数(得到横向速度),二阶导数(得到横向加速度),三阶导数(得到横向加速度变化率)有:

车辆横移过程中需要满足乘客感觉舒适,不致有明显倾覆感,因此需要满足以下约束条件:


联立式(10)和式(11),可得到换道长度L满足的条件:

式中:amax为最大横向加速度,m·s-2;jmax为最大横向加速度变化率,m·s-3,取0.6 m·s-3[16];W取3.75 m;τmax为换道紧急程度系数最大值。
将所测路段的左右换道汇总后,得到τ的分布如图11所示。可见右换道τ值集中在2.5~3.0之间,左换道τ值集中在2.0~2.5之间,为保证大部分车辆平稳安全换道,综合取右换道τmax为3.5,左换道τmax为3.0。
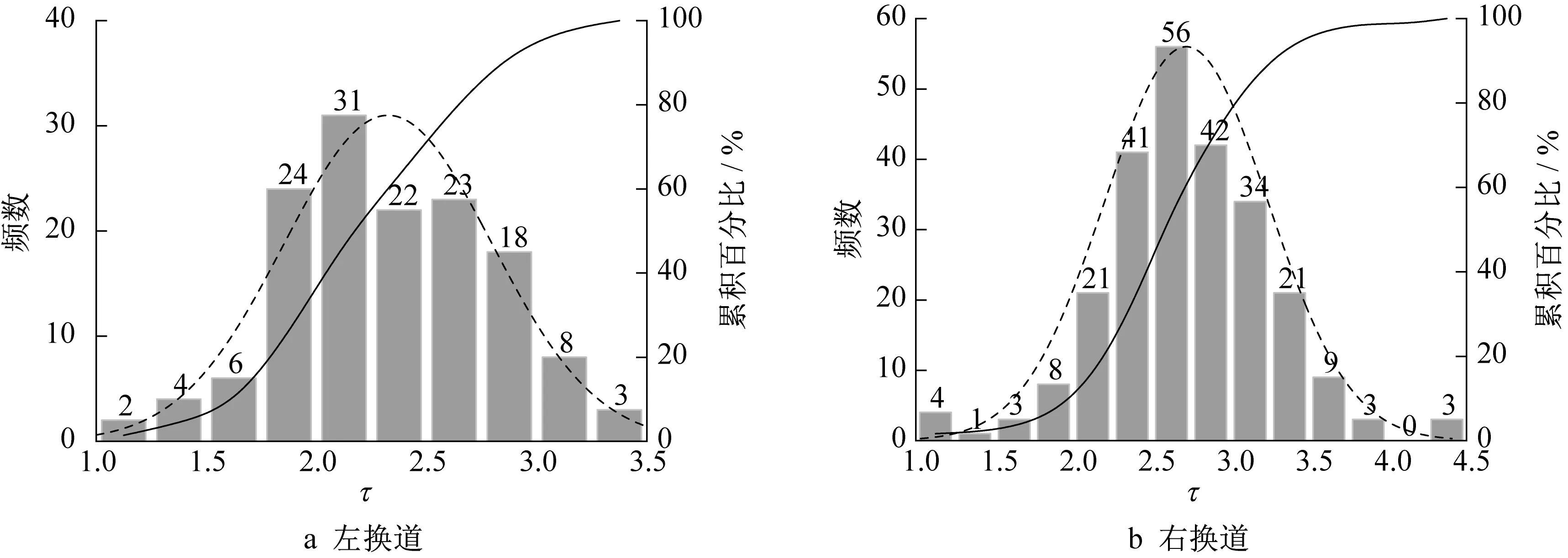
图11 换道紧急系数τ分布Fig.11 Distribution of channel change emergency factor τ
当车辆在反向超高路段行驶时,重力的水平分力会成为向心力的一部分,对舒适性不利。刘斌[17]根据不同设计速度下的横向力系数取值,在反向超高4%的条件下计算的横向加速度值如表5所示。

表5 最大横向加速度amax取值Tab.5 Value of maximum lateral acceleration amax
由于小客车运行速度较高,换道距离长,故采用小客车运行速度作为辅助车道的运行速度。结合本文实测数据及我国高速公路实际运营情况,对最外侧车道及辅助车道运行速度进行综合取值,并计算相应的换道距离列于表6。

表6 车道运行速度取值及换道距离(取整)Tab.6 Lane operating speed values and lane change distance(round up)
3.1.2 反应距离L2
驾驶人在完成右换道操作以后开始识别提示标志和标线,这期间车辆维持原速行驶的距离称为反应距离。对驾驶人在公路上反应时间的研究表明:一般情况下驾驶人在2.616 s内就能完成对指路标志上汉字的认读和理解[18]。考虑到选择反应数目所增加的时间0.3 s,综合出口反应时间取3.0 s,并采用式(13)对反应距离进行计算:

式中:Va为辅助车道上车辆运行速度,km·h-1,按表6取值;t0为反应时间,s,取3.0 s。
3.1.3 等待距离L3
等待距离为驾驶人对标志识读完毕后,拟采取左换道行为之前,寻找左侧直行车道出现可插入间隙过程中在辅助车道继续行驶的距离。根据相关研究[19],高速互通在分流区其主线车头时距近似服从移位三阶爱尔朗分布,如式(14)所示:

式中:h为车头时距,s;t为时间,s;λ为相邻车道单位时间车辆平均到达率;Qt为三级服务水平下单车道最大服务交通量[6],pcu·h-1·ln-1,按表7取值;σ为车头时距最小值,s;tr为反应时间,取1.0 s;ts为协调制动时间,取0.4 s;d为车长,m,以小型车为标准,取6 m。

表7 三级服务水平下最大服务交通量Tab.7 Maximum service traffic volume at three levels of service
由此得到车头时距分布的概率密度为

当相邻车道上的车头时距小于临界车头时距tc时,大部分驾驶人不会选择变换车道,对应的车头时距会被拒绝,由此得到平均等待时间tw为

在等待时间tw内,车辆行驶距离为

3.2 辅助车道长度建议值
在相同主线设计速度条件下,主线基本车道数不同,最外侧车道和辅助车道的小客车运行速度存在差异,从而导致左、右换道距离不同,取换道距离的最大值以适应各种不利情况。根据辅助车道长度计算模型式(8)—(17),计算辅助车道最小长度的过程参数和计算结果如表8所示。表中,括号内数值为《路线规范》中规定的最小值。
从表8中可以看出,主线设计速度越大,对应辅助车道车辆运行速度越大,所需辅助车道长度越长。在相同设计速度条件下,辅助车道长度与运行速度、相邻车道交通量成正比,与换道紧急程度成反比。由图12分析可知:本文得到的推荐值小于《路线规范》一般值,但与一般值较为接近,说明《路线规范》规定的一般值能够满足车辆的二次换道需求。然而目前国内大部分出口辅助车道长度多数采用规范最小值,留给驾驶人的反应时间可能不足,从而导致部分车辆强制重新汇入主线,容易在出口处引发交通事故。

表8 辅助车道长度计算表Tab.8 Calculation of length of auxiliary lane
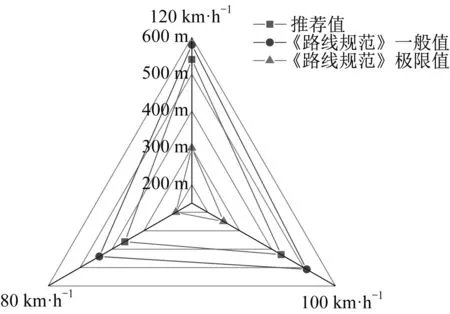
图12 辅助车道长度推荐值与规范值对比Fig.12 Comparison of recommended value and standard value for length of auxiliary lane
4 结论
为探究辅助车道长度的合理取值,选取基本车道数不同的三处双车道出口辅助车道路段,通过无人机航拍的方式,结合YOLOv3目标检测算法,卡尔曼滤波及Frenet坐标转换方法,得到车辆微观换道轨迹数据,进而将其应用于辅助车道长度研究中。主要结论如下:
(1)提出了一种新的车辆轨迹获取方法,该方法能够准确地描述曲线路段车辆的运行状态,经滤波后的车辆轨迹更为符合实际情况。
(2)采用修正双曲正切函数换道模型拟合换道轨迹,左、右换道的拟合优度分别达到了97.48%、97.62 %,表明所使用换道模型能够准确描述车辆在辅助车道路段的行驶特征。
(3)建立了基于微观换道行为的直接式双车道出口辅助车道最小长度计算模型,将车辆在辅助车道上的行驶过程分为右换道段、反应段、等待段和左换道段,从原理上解释了辅助车道长度确定的依据。
(4)《路线规范》中对于双车道出口辅助车道长度最小值的规定偏小,在设置较长辅助车道困难的情况下,应加强车道管理和出口预告,减少直行车辆误行至辅助车道。
限于篇幅原因,本文仅调查了设计速度120 km·h-1条件下辅助车道的换道行为特性,且调查区域和样本数量有限。随着交通量的日益增加,双车道匝道或成为建设的主流,今后的研究应增加对辅助车道交通特征的调查数据样本,进一步验证辅助车道范围内驾驶人的驾驶行为特征。
作者贡献声明:
潘兵宏:设计研究方案,统筹规划,指导论文写作。
王潮:数据采集与分析,初稿写作与修改。
王俏:参与论文思路设计,理论建模。
马朝辉:参与方案讨论及数据分析。
谢振江:参与数据采集,文稿修改。
