船艏新型附体减阻减纵摇的数值计算及模型试验研究
2022-12-01赵港全刘志华刘文涛
赵港全,刘志华,刘文涛
(海军工程大学舰船与海洋学院,武汉 430033)
0 引 言
努力提高船舶的快速性和适航性,一直是船舶设计师和船舶性能研究领域学者密切关注的课题。提高船舶的快速性,主要的技术途径为减小船舶在水面航行时的运动阻力。水面船舶的阻力成分主要包括摩擦阻力、粘压阻力和兴波阻力。减小摩擦阻力可以通过减小船体湿表面积、改变与船体湿表面相接触的流体属性等手段(如微气泡减阻[1]等)进行;减小粘压阻力主要通过改进船体外形[2]进行。兴波阻力随航速的增加急剧增大,对于排水型高速船,兴波阻力占总阻力的比重达50%以上,所以降低总阻力的重点在于减小兴波阻力。减小兴波阻力主要有船型优化技术[3]、球鼻艏技术[4]和消波水翼技术[5]等。其中,球鼻艏技术应用在船长弗劳德数小于0.35的低速船或中低速船上能产生较好的减小兴波阻力效果,但对高速船较难取得减阻效果;消波水翼减小兴波阻力的效果只有在船长弗劳德数大于0.6的极高速航行工况下才能体现。目前排水型高速船的长度弗劳德数基本处于0.4至0.5之间,在船型优化后,进一步采用上述减阻技术难以取得令人满意的减阻效果,因此迫切需要突破高航速减阻的关键技术。
船舶在有风浪的海况中航行时,船体不可避免地会产生左右横向摇摆、艏艉纵向摇摆、垂向震荡以及过大的加速度等,这些船体运动相互耦合,再叠加风浪的作用,船舶会出现艏部上浪、甲板淹湿、艏部砰击和人员晕船等现象,对船舶的航行安全性、人员的舒适性和船上设备装备的工作效能发挥都产生不利影响。为改善船舶的适航性,人们提出了安装舭龙骨[6]、减摇鳍[7]和减摇水舱[8]等减摇措施。发展至今,船舶减横摇研究方向已有成熟的技术和产品大量应用于实船,相比之下减纵摇的研究进展较为缓慢。挪威科技大学的Eirik Bockmann 等[9]开展了在油船船艏水线面以下设置固定鳍来减小船体在波浪中的垂荡和纵摇响应的研究;哈尔滨工程大学的李积德、孙树政研究团队[10-12]开展了减小船体纵摇响应的半潜体加首鳍的减摇组合附体技术研究。
综合而言,在减阻方面,目前针对船长弗劳德数在0.4 至0.5 之间的船舶减阻难以取得较大突破;在减纵摇方面,现有的船舶减纵摇技术尚需进行深入研究。且现有的减阻技术几乎不会产生减摇的效果,减摇技术也几乎不会产生减阻的效果,即船体减阻技术和减摇技术是相互独立的。
本文在前期提出的具有减阻效果的船艏平板附体技术[13]基础上进行深入研究。针对其艏部抨击和喷溅现象进行改进,进一步提出集减阻减摇于一体的新型三维船艏附体技术。以某高速船为研究对象,根据船模在0.41、0.45、0.494三种弗劳德数下的船艏兴波现象模拟计算结果,进行新型三维船艏附体方案的设计。数值模拟及模型试验结果表明该三维附体具有良好的高航速减阻、减摇效果。本文的研究可为进一步改善高速船舶的快速性和耐波性提供新的技术手段。
1 研究对象及新型船艏附体设计
1.1 研究对象
本文以某高速船模为研究对象,为方便数值模拟计算与船模试验,本文取用缩尺比为1:24.824的船模来开展研究,船模如图1所示,模型参数如表1所示。

表1 某高速船模的主要参数Tab.1 Main particulars of a high-speed ship model
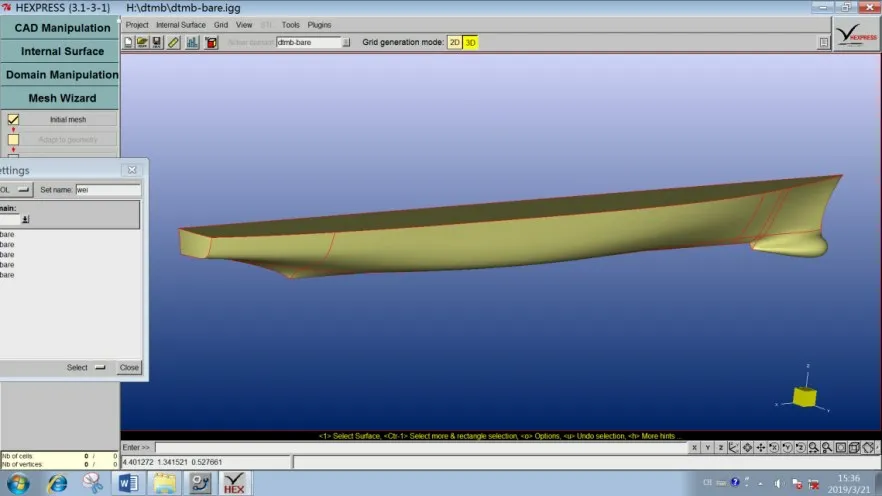
图1 研究对象Fig.1 Research object
1.2 船模兴波的CFD计算
1.2.1 计算域网格划分
为了对某高速船模兴波波形进行分析,采用STAR-CCM+软件对其开展数值计算。本文计算中,采用求解RANS 方程,并引入RNGk-ε湍流模型来处理湍流问题。为了考核数值计算方法的准确性,网格参照第22 届ITTC 推荐规程中的加细比进行加密,即网格的基础尺寸按 2 加密,其它参数保持不变,划分了三套单元总数分别为132万、252万及536万的网格,计算了船模在三套网格下三种不同速度的总阻力、船体升沉与纵倾。图2 为三套网格下船模表面的网格划分情况,图3显示了在方案2 下针对水线长5.72 m 的船模非结构网格划分情况,计算网格在船体艏部区域和自由面附近区域进行了加密处理。表2为不同的网格方案。
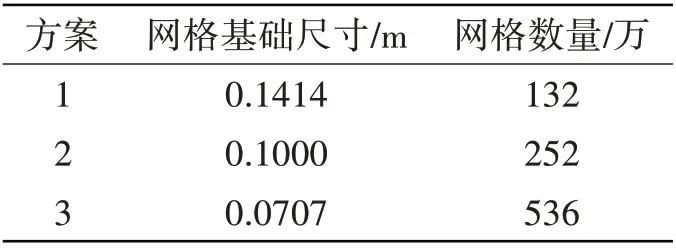
表2 网格方案Tab.2 Mesh schemes
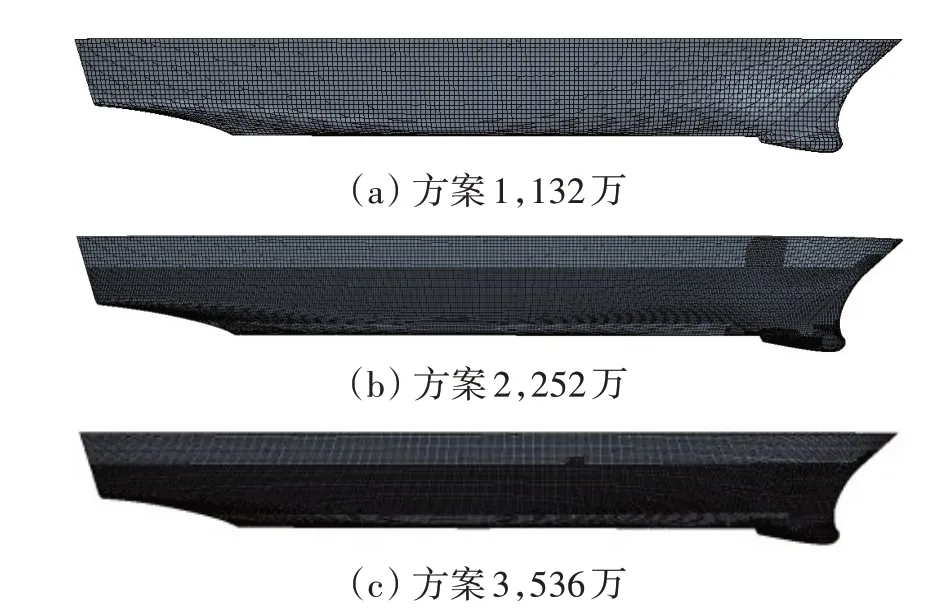
图2 船模表面网格划分情况Fig.2 Surface grid of ship model
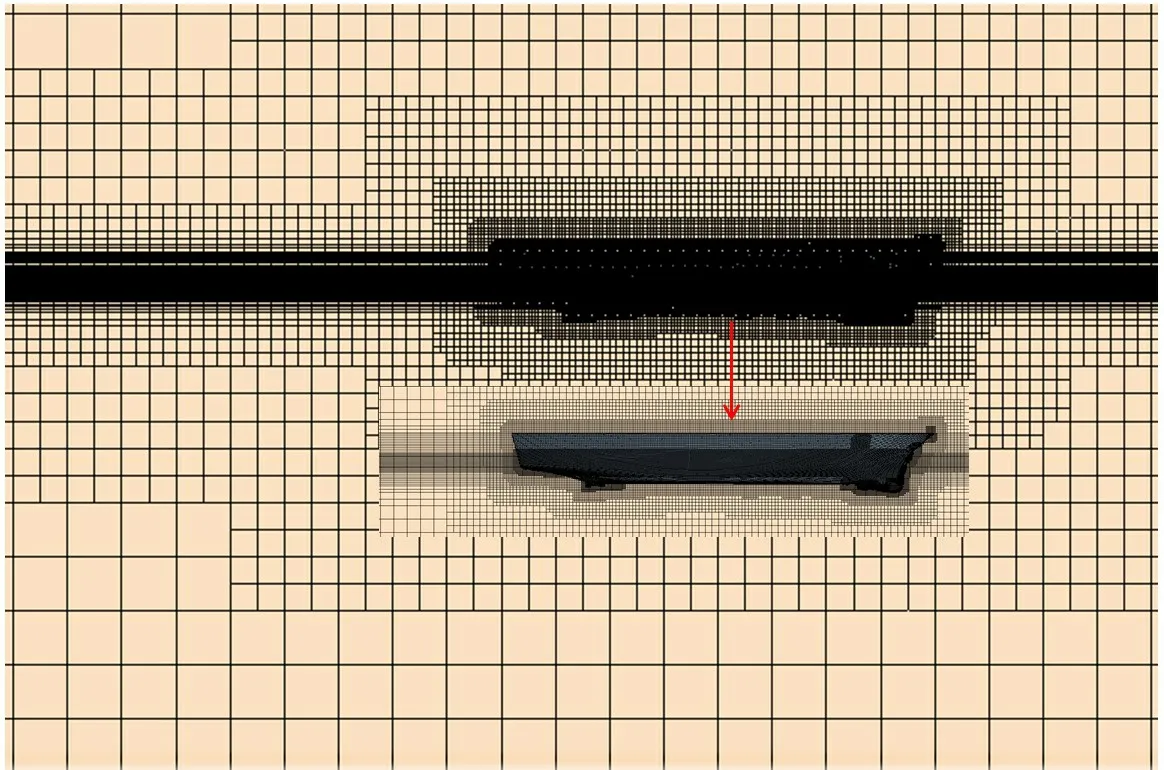
图3 计算域网格Fig.3 Meshes of calculation region
1.2.2 网格收敛性分析
船模在三套网格下的数值计算结果对比如表3所示,其中航速为3.371 m/s(长度弗劳德数为0.45)时,三种网格方案下船模总阻力时历曲线如图4所示。

表3 三套网格方案下的数值计算结果对比Tab.3 Comparison of numerical results under three mesh schemes
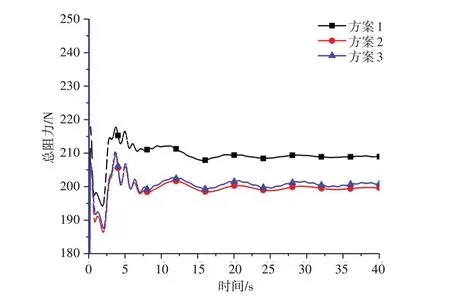
图4 航速为3.371 m/s时船模总阻力时历曲线Fig.4 Time history of the total resistance of the ship model when the speed is 3.371 m/s
从图4 可看出,方案1 与方案2、3 的总阻力计算结果有较大偏差,方案2 与方案3 的计算结果相近。相邻两套网格对应的每个航速下计算得到的总阻力R之差用εRG表示,即

收敛率RG的计算公式为

类似地,升沉和纵倾采用相同的方法进行计算,计算结果如表4所示。
从表4 可看出,0<RG<1,三套网格为单调收敛的。结合图4中的总阻力时历曲线,在后续数值模拟中均采用方案2的252万网格进行计算。
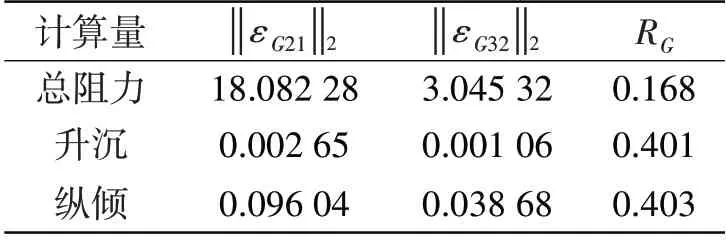
表4 收敛率计算结果Tab.4 Results of convergence rate
1.3 新型船艏附体设计思想
文献[13]中安装二维平板式附体的船模在静水中拖曳速度较低时浸入水中,拖曳速度较高时,附体随船艏抬升至水面,前方水流高速冲击附体,形成向两侧和向后的喷溅水花,并且喷溅水花容易向上翻卷,同时这种二维平板式艏部附体随船体在波浪中顶浪航行时,船体的纵摇运动引起艏部附体垂向周期性穿入或者穿出水面,当附体从水上穿入水面到水下时,附体平面对水面直接地拍击,而附体从水下穿出水面到水上时,又会向上“舀水”,这些现象都是非常复杂的非线性水动力现象,如图5所示。

图5 二维平板附体产生的复杂水流现象Fig.5 Complicated water flow phenomenon caused by two-dimensional flat plate appendage
本文采用新型三维船艏附体来引导经过附体表面的水流,抑制附体侧向扩展的喷溅,降低附体垂向运动对水面向下的拍击效应和向上“舀水”的现象。具体的构型方式是:附体的前端点继续向前延伸,在船舶向前航行时能先期划破水面,避免附体与船体同步触水引起激烈的非线性现象;将附体的上表面按照引导水流流动的方式,改型成前部尖瘦、中部钝圆、尾部平滑过渡的三维曲面形状,并与船体艏部外形相配合,靠近船体外表面的边较高,从船体向外曲面的高度逐渐减小,从而避免附体从水下向上运动的“舀水”现象;将附体的下表面按照抑制喷溅和降低砰击的方式,改型成既具有纵向曲率又具有横向曲率的曲面形状,精细调节附体下表面的曲率分布,使其具有优良的水动力外形。为了减小兴波阻力,通过观察裸船体在不同航速下的兴波图像(图6),本文设计了长度约为船长的十分之一、宽度约为船宽的三分之一、安装在近水面附近的新型三维船艏附体,具体安装位置如图7所示。

图6 裸船体在不同航速下的兴波图像Fig.6 Wavemaking images of a bare hull at different speeds

图7 新型三维船艏附体安装位置Fig.7 Installation position of the new three-dimensional bow appendage
2 船艏附体减阻减纵摇的CFD计算
2.1 减阻效果的数值计算
根据1.3节中理论研究的设计思路,基于5.72 m长的某高速船模在弗劳德数0.45时的艏部兴波现象,设计了新型三维船艏附体。附体长度方向的起点和终点分别为弗劳德数0.45 时船艏兴波隆起点和波峰顶点,长度为0.653 m;附体宽度方向的起点和终点分别为船体外表面和船艏兴波最大宽度处,以保证附体能完全覆盖船艏兴波。为比较不同附体宽度对船模减阻效果的影响,构思了两种最大宽度分别为0.4 m、0.286 m 的附体,命名为A1、A2(参见图8),两种附体在船艏的安装位置相同,保证船模静浮时附体的下表面与水面重合。对设计的新型三维船艏附体开展了减阻效果的数值模拟计算。
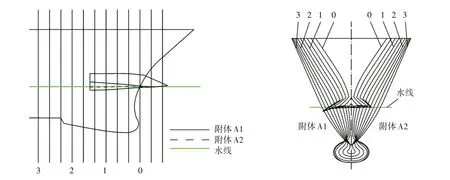
图8 新型三维船艏附体Fig.8 New three-dimensional bow appendage
图9给出了在速度为3.371 m/s(弗劳德数为0.45)的工况下,安装新型三维船艏附体前后艏部兴波的对比。

图9 安装船艏附体前后艏部兴波对比Fig.9 Comparison of fore waves before and after the installation of bow appendage
由图9可知,新型三维船艏附体具有抑制艏部兴波波高和减小总阻力的效果。表5给出了在长度弗劳德数分别为0.41、0.45、0.494 工况下,加装艏部抑波减阻附体对总阻力、升沉和纵倾的影响。其中,升沉选取船体下沉为负,纵倾选取船体艉倾为负。

表5 模拟计算结果Tab.5 Simulation results
从表5 可以看出,同裸船体相比,加装艏部抑波附体使总阻力最多减少5.03%,升沉减小,艉倾增加0.219°。数值计算结果表明,加装附体能够有效抑制兴波,减小船体总阻力。
2.2 减摇效果的数值计算
2.2.1 计算方法为进行船舶波浪运动响应分析,采用数值计算方法模拟船体在波浪中的运动,将波浪流动作为两相(水和空气)流处理,自由液面为水与空气的交界面,且将水和空气都作为不可压缩流体处理。利用VOF 波模型进行空气—水交界面上表面重力波的模拟,运用边界造波法,通过给定造波边界处流体的五阶速度和波面瞬时升高,实现在数值计算域中使用流体体积VOF 法对Stokes 五阶波浪的精确模拟,同时借助6 自由度运动模型系统计算安装不同外形艏部附体的船体在不同波长环境下的运动响应。
方程的求解采用离散型迭代式数值计算方法,所建立的计算模型和计算域网格如图10~11所示。
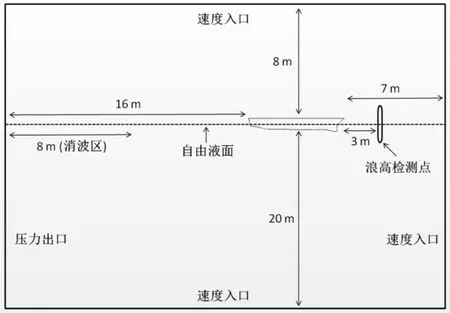
图10 计算域与边界条件Fig.10 Calculation region and boundary condition
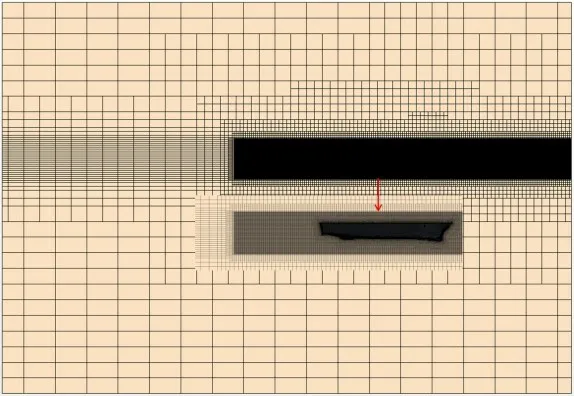
图11 计算域网格Fig.11 Meshes of calculation region
进行计算域网格划分时,在保证不同尺寸的网格平缓过渡的前提下,沿波浪传播方向要保证划分足够数量的网格,以避免数值阻尼引起波浪幅值的衰减,但在出口处的消波区可以加大网格尺寸,减少总体网格量;沿垂向自由面附近要保证划分足够数量的网格,以此精确地捕捉自由液面高度变化。
在数值模拟中,采用在入口边界给定波动速度的造波方法,并基于Stokes理论的五阶近似对五阶波建模。在计算域的出口处设置阻尼消波区,通过对垂直运动施加阻力来产生波阻尼,消波区的长度设置为波长的1~2倍。按下式对该区域内的流体质点垂向速度做强迫衰减:

式中,μ(x,z)为衰减函数,可表示为

式中,xs≤x≤xe,zb≤z≤zfs,α为阻尼控制参数,脚标s 和e 分别代表阻尼区沿x方向的起点和终点,b 和fs 分别代表沿z方向的底部和自由面。
2.2.2 减摇效果的数值计算
数值模拟得到的波浪环境如图12所示。
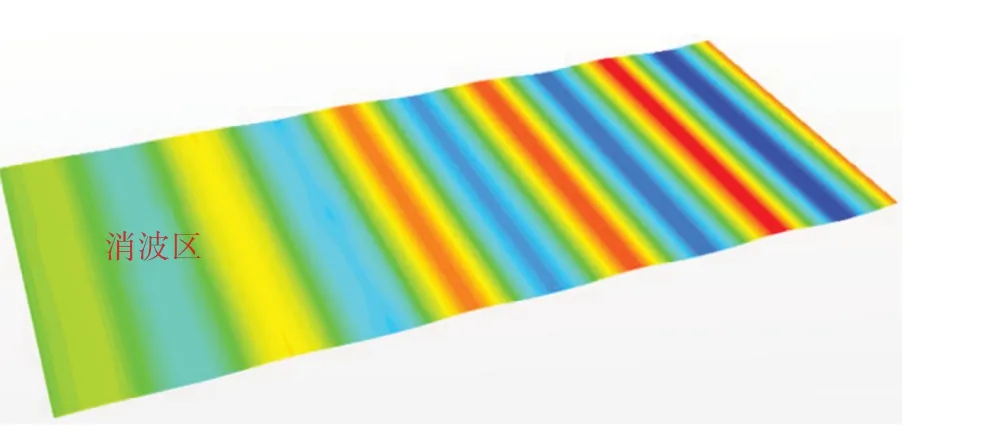
图12 波形模拟Fig.12 Waveform simulation
船模在波浪中的航速不宜过大,在计算中取航速为3.071 m/s,以波高为0.161 3 m 而波长不同的规则波为模拟对象,数值计算中输入波长分别为3.432 m、5.72 m、6.864 m、8.008 m、9.152 m、11.44 m,波长的选择对应了船体在波浪中运动响应较为剧烈的共振区。计算工况和波浪参数设置如表6所示。
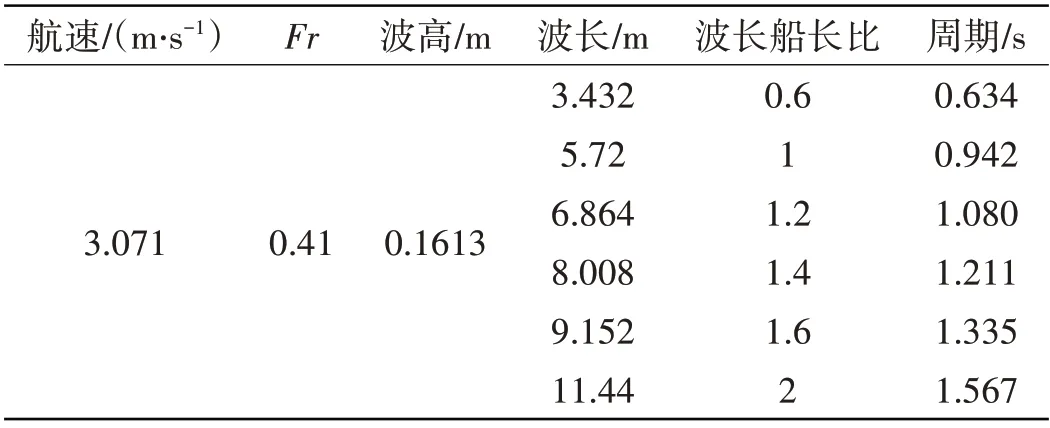
表6 计算工况与波浪参数Tab.6 Calculation conditions and wave parameters
根据上述计算方法,分别在6种波长下对船模的波浪运动进行数值模拟计算,船模在波浪中的运动云图如图13所示。

图13 船模在波浪中的运动云图Fig.13 Motion nephogram of ship model in waves
根据数值模拟计算得到船模在不同波长的规则波中的纵倾和升沉时历曲线如图14~15所示。

图14 纵倾时历曲线Fig.14 Time history curve of pitching
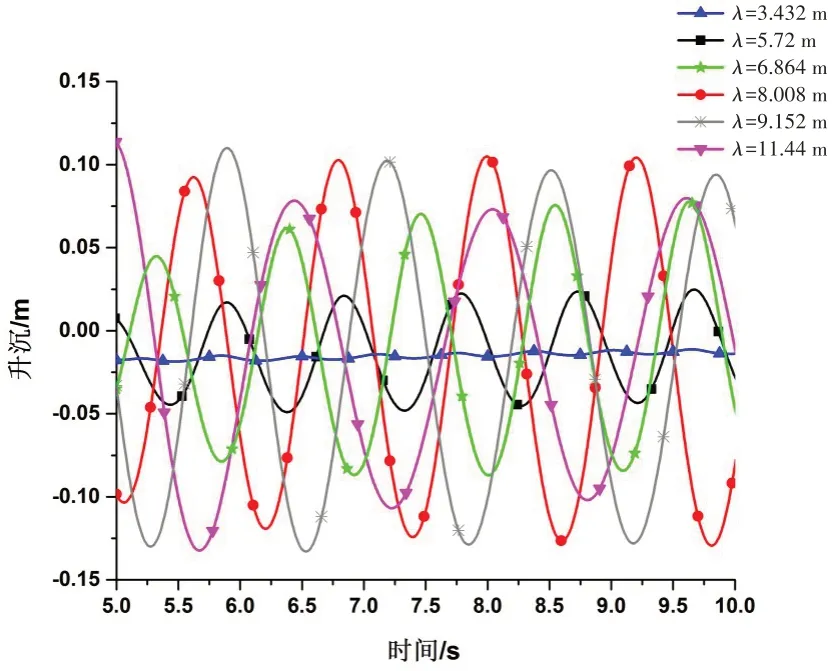
图15 垂荡时历曲线Fig.15 Time history curve of heave
由图14~15可知,当船长波长比为0.6(波长为3.432 m)时,船模运动响应幅值较小,随着波长的增大,船模在波浪中的运动响应幅值逐渐增大,当船长波长比增大到1.6(波长为9.152 m)时,波长对船模运动响应幅值的影响开始减小。因此本文选取5.72 m、6.864 m、8.008 m和9.152 m 四个特征波长进行数值计算。
为了通过数值计算方法模拟不同外形的新型船艏抑波附体减摇效果,系统计算了加装新型三维船艏附体的船体在不同波长环境下顶浪航行时的纵摇和垂荡响应幅值(如表7所示)。
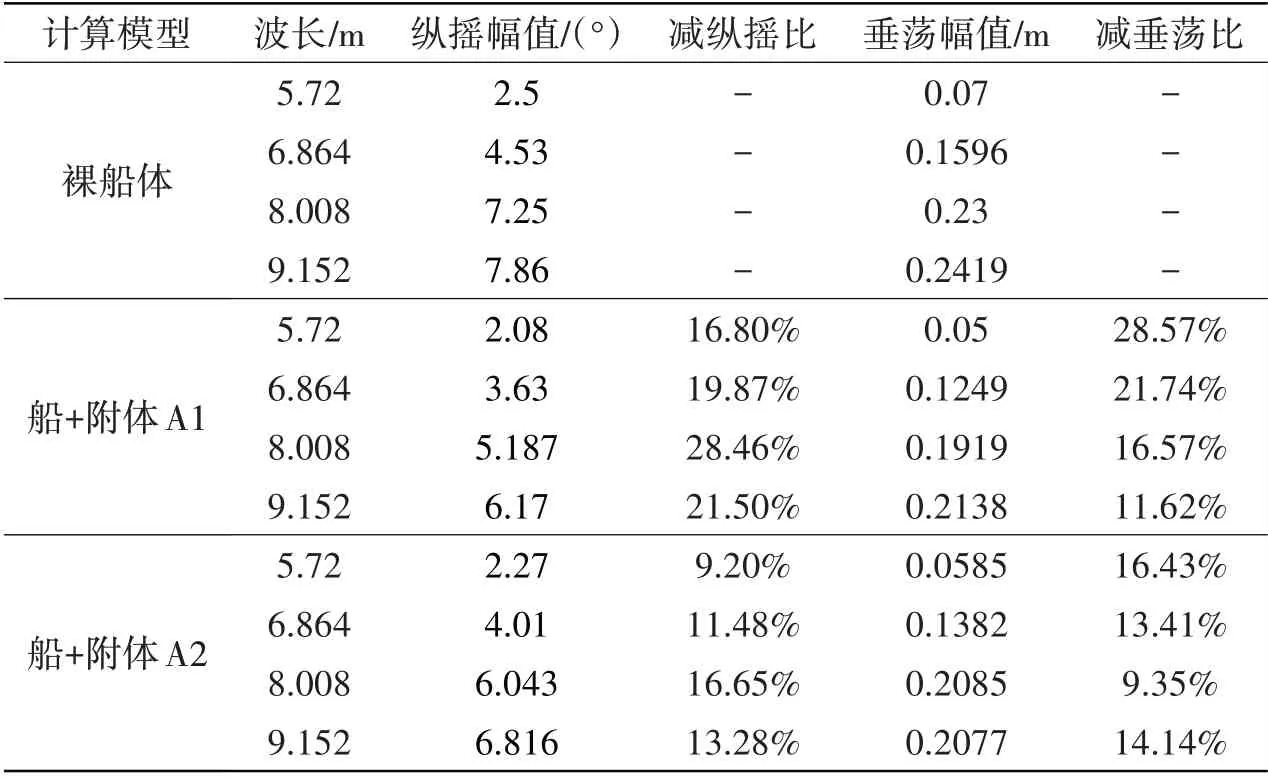
表7 不同附体下船体运动响应幅值Tab.7 Response amplitude of hull with different appendages
表7 中计算结果显示不同附体均具有一定的减摇效果,在两组附体计算结果对比中附体A1 效果较为显著。图16~19 为相同计算时间段内有无加装附体A1 的船模在不同波长环境中的纵摇和垂荡时历曲线对比。

图16 加装附体A1的船模在波长为5.72 m时的运动响应Fig.16 Motion responses of ship model with Appendage A1 at a wavelength of 5.72 m
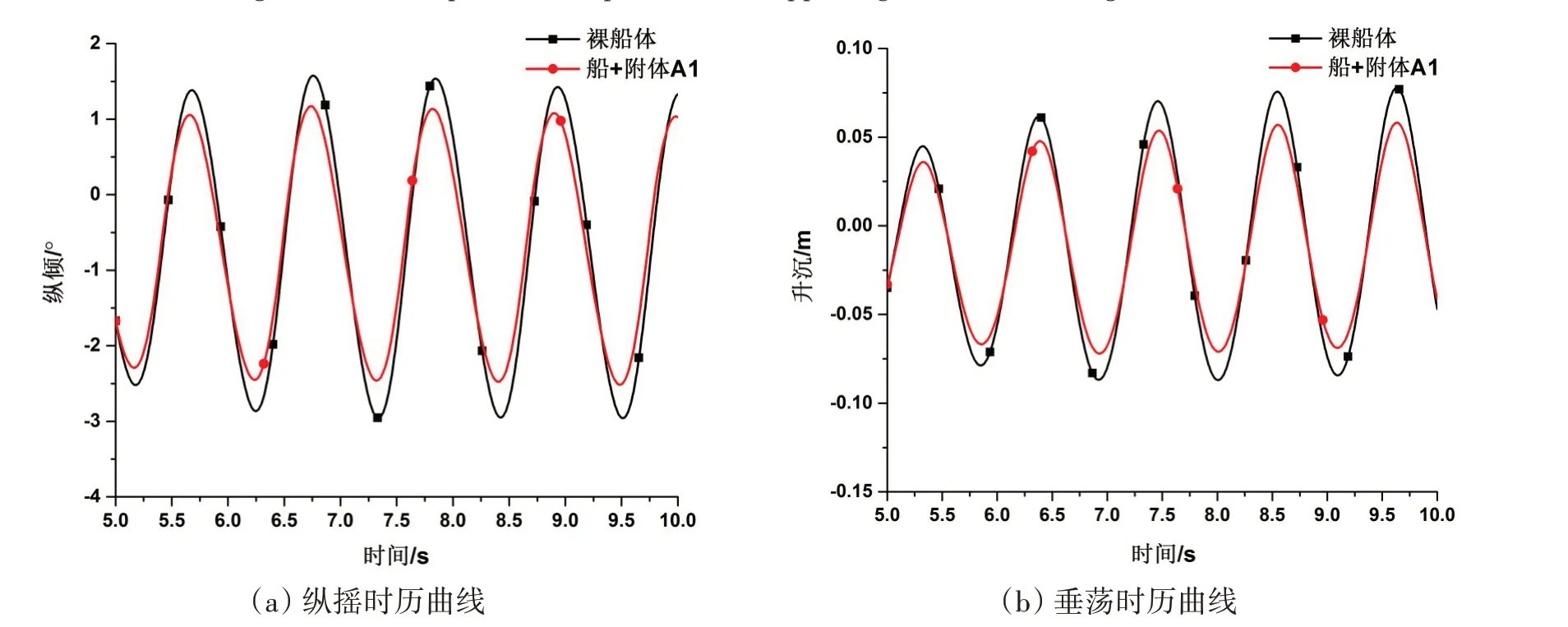
图17 加装附体A1的船模在波长为6.864 m时的运动响应Fig.17 Motion responses of ship model with Appendage A1 at a wavelength of 6.864 m

图18 加装附体A1的船模在波长为8.008 m时的运动响应Fig.18 Motion responses of ship model with Appendage A1 at a wavelength of 8.008 m
图19 加装附体A1的船模在波长为9.152 m时的运动响应Fig.19 Motion responses of ship model with Appendage A1 at a wavelength of 9.152 m
从表7 和图16~19 可看出,新型三维船艏附体在船长波长比为1~1.6 的范围内均有较好的减摇效果。数值计算结果表明,新型三维船艏附体能够减小船体在波浪中的纵摇和垂荡运动响应幅值,即新型船艏附体具有既减阻又减摇的效果。
3 船艏附体减阻减摇效果的模型试验验证
通过数值模拟,计算得到了新型三维船艏附体具有减阻减纵摇的效果。为了进一步验证数值计算结果的正确性和新型三维船艏附体的减阻减摇效果,本文对安装有相同尺寸的附体船模进行了静水阻力拖曳试验及波浪中顶浪航行的运动响应测量试验。
3.1 试验模型
为了对数值计算结果进行对比分析,试验模型与数值计算模型相同。试验模型的制作材料为松木,其模型如图20所示。试验模型的排水量为549 kg,水线长为5.72 m,为减小层流的影响,模型艏部装有激流丝。减阻试验的试验速度分别为3.071 m/s、3.371 m/s、3.7 m/s(长度弗劳德数分别为0.41、0.45、0.494),减摇试验的试验速度为3.071 m/s(长度弗劳德数为0.41),试验水池造波波长为5.72 m(波长船长比为1)。

图20 试验模型Fig.20 Experiment model
模型试验所用的船艏附体尺寸与数值计算中的保持一致,材料为铝合金。船模艏部标记了附体的安装高度标线,以保证安装位置精确无误。船艏附体的安装如图21所示。

图21 安装在船艏的新型附体Fig.21 New appendage installed on the bow
模型试验在高速拖曳水池进行[14]。试验水池长510 m、宽6.5 m、水深5 m。倾角传感器固定在模型艏部。垂向位移采用拉线式位移传感器,测量点在重心处。阻力采用BLR-1拉力传感器,拖曳点在重心处,拖曳角为0°。阻力的测量精度为0.2%,倾角的测量精度为0.01°,垂向位移的测量误差小于1%。
3.2 减阻效果的模型试验结果
表8给出了加装新型船艏附体前后总阻力在不同弗劳德数下的变化情况。本附体是针对高速船(弗劳德数0.45)而设计的,同裸船体相比,加装附体的船模在弗劳德数分别为0.41、0.45的高航速下分别取得了6.21%、10.6%的减阻效果。

表8 加装新型船艏附体前后总阻力变化Tab.8 Changes in total resistance before and after the installation of new bow appendage
2.1 节中数值计算得到弗劳德数为0.45 时的减阻效果为5.03%,产生这种差距的原因一方面是数值计算难以对附体附近的非线性水动力现象进行精确模拟;另一方面是附体周围存在水-气混合流动,尚需进一步改善复杂两相混合流动的计算精度。从数值计算和模型试验的结果来看,新型三维船艏附体具有较好的减阻效果。
图22~23分别给出了试验速度分别为3.071m/s和3.371m/s时,船模在加装附体A1、A2前后的艏部兴波图像对比。对比试验图像可知,艏部兴波明显被船艏附体抑制。兴波被抑制后,一方面,兴起波浪需要提供的能量耗散减少了;另一方面,兴波引起的船体压力分布被改变了,从而兴波阻力得以下降。
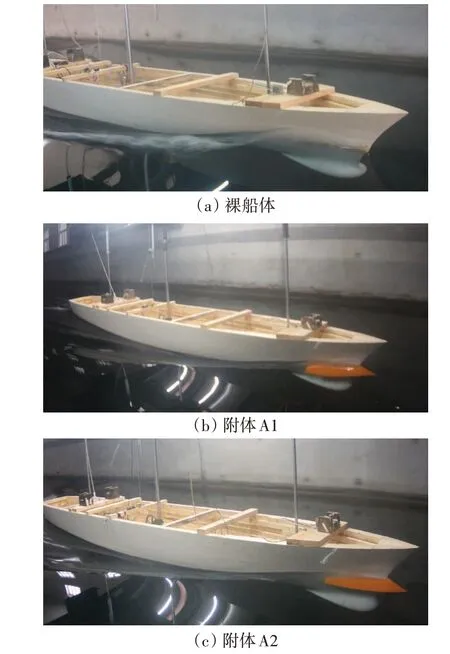
图22 船模速度为3.071 m/s时艏部兴波对比Fig.22 Comparison of fore waves when the ship model speed is 3.071 m/s
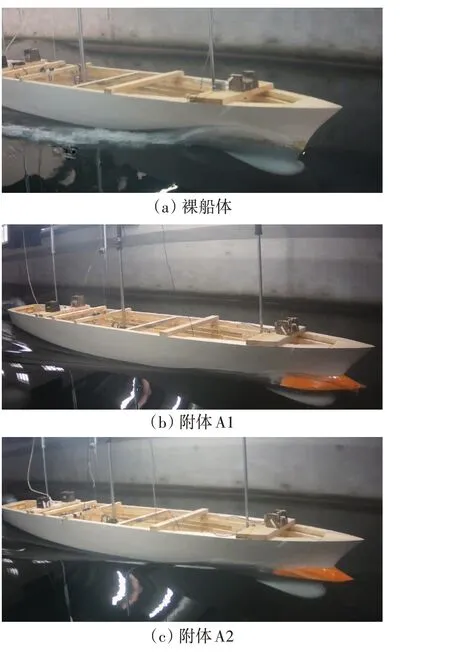
图23 船模速度为3.371 m/s时艏部兴波对比Fig.23 Comparison of fore waves when the ship model speed is 3.371 m/s
3.3减摇效果的模型试验结果
分别对加装附体A1、A2 的船模开展了规则波中顶浪航行的运动响应试验,表9 给出了加装新型艏部附体前后纵摇、垂荡和艏部垂向加速度在不同试验速度下的变化情况。从表中可以看出,加装船艏附体的船模在弗劳德数为0.41 的高速度下取得了48.14%的减纵摇及38.07%的降低垂荡幅值的效果。2.2.2节中数值计算得到弗劳德数为0.41、船长波长比为1时,船艏附体A1、A2的减纵摇率分别为16.8%和9.20%,这种差距产生的原因是船模在波浪中的纵摇和垂荡导致附体周期性出入水面,并伴随有附体抨击水面的现象,产生突加垂向运动阻尼,降低船体的纵摇和垂荡响应幅值。这种附体抨击水面产生的显著垂向运动阻尼在数值计算中难以精确模拟。

表9 加装新型艏部附体降低船体运动响应的效果(波长船长比为1)Tab.9 Effects of installing new bow appendages on reducing ship motion responses
4 结 语
本文针对高速船舶新型减阻减摇技术开展了深入研究,针对二维平板附体艏部抨击和喷溅现象进行了改进,进一步提出了集减阻减摇于一体的新型三维船艏附体技术。以某高速船为研究对象,根据船模在0.41、0.45、0.494 三种弗劳德数下的船艏兴波现象模拟计算结果,得到了两种新型船艏附体方案。采用数值模拟方法对加装新型三维船艏附体的船模进行了各状态下静水阻力计算及在规则波中纵摇响应的计算。计算结果表明该附体具有减小高速船总阻力和降低船舶在波浪中运动响应的效果。通过船模试验对该附体减阻减摇的效果进行了验证,试验结果表明,在弗劳德数为0.41~0.494的高航速范围内,该附体减阻效果最多可达10.6%;在弗劳德数为0.41、船长波长比为1时,纵摇幅值、垂荡幅值最多可分别减少48.14%、38.07%。
本文的研究为进一步改善船舶阻力性能和耐波性提供了新的技术途径。但是该附体在船体艏部突出的结构较大,对船舶运动中的艏部结构强度和结构响应还需开展深入细致的理论和试验研究工作。