基于图像识别技术的隧道工程监控管理系统设计
2022-12-01何方圆
何方圆
(北京市政建设集团有限责任公司,北京 100045)
0 引言
在大型隧道工程运维过程中,由于隧道内部与地面存在空间隔离,隧道因其具有改善路网,节约土地等优点,逐渐成为公路建设的重要组成部分。但由于隧道具有空间狭窄、结构封闭、视线差等缺陷,行车在隧道中容易出现交通事故,也容易因为隧道的盲区导致灾难性事故,由于隧道入口的行车无法获知隧道内的车辆信息,使交通事故进一步扩大。一旦发生事故,救援工作复杂困难,而且容易造成严重的交通阻塞,并有可能引发火灾,从而引发灾难性的后果,因此,保证隧道行车安全至关重要。同时,对于一些进入隧道内的常规车辆,比如追查肇事司机、查询过往车辆,常规的装置就很难实现。大量工程建设的进展情况,但仍旧存在一些问题。
文献[1]在隧道工程建设中采用光纤传感技术实现隧道工程测量,光纤传感技术由于其自身具有的技术特性,能够实现数据信息的无线传输,自动化程度高,检测精度高,而且能够实现数据信息的实时采集,能够大大提高隧道工程的诊断能力,精度高。虽然预警能力提高,但该方法成本较高,难以普及。文献[2] 通过应用分布式光学温度传感器实现隧道内电缆技术的检测,通过隧道巡检机器人实现异常数据信息获取,这种方法能够检测隧道内电缆故障,并采用了拉曼分布式光纤温度传感器,虽然精度提高,但数据分析能力欠佳。
为了提高隧道工程故障诊断能力,采用图像识别技术实现隧道工程故障诊断,成本低,故障诊断分析能力高。
1 隧道工程可视化监管方案设计
为了提高本研究的技术创新点,本研究设计了一套图像识别技术实现隧道工程内数据信息获取和分析,构建多传感器数据信息融合模型来对巡检机器人采集的多种数据进行汇总分析,输出整个隧道工程的运维进度以及运维的相关细节信息。设计一种可视化管理系统,该系统通过多传感器数据信息融合模型输出的数据是使模型中的各个单元进行交互,使模型能够反映隧道工程的运维情况,同时在系统终端通过对模型状态进行修改[3-4],该可视化管理系统可以自动化的向运维具体负责人传输控制信息,高效的完成对隧道工程与模型的交互。隧道工程进行可视化方案的运维建构如图1所示。
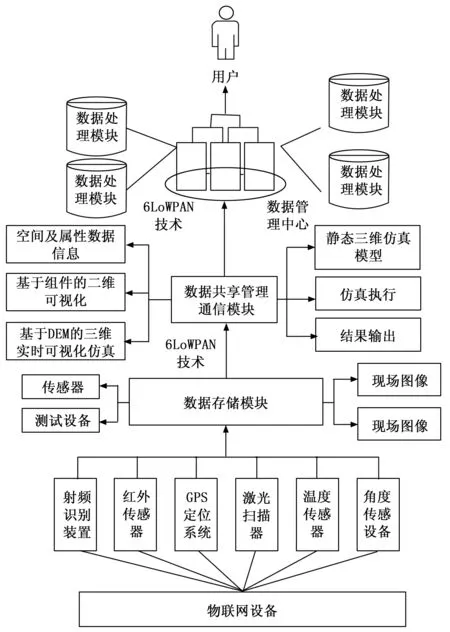
图1 隧道工程可视化管理体系架构
如图1所示,本研究设计的运维可视化管理体系通过利用巡检机器人携带多种信息采集装置,通过多种数据采集装置采集运维进度信息,并将采集到的设备信息存储到数据库中,利用多传感器数据信息融合模型对数据进行处理[5-6],并通过数据共享管理通信模块对数据进行处理,通过三维可视化模型对数据进行可视化展示,同时用户也可以通过三维可视化模型对运维进度进行修正,以此完成对运维进度的双向监督,双向管理[7-8]。
1.1 图像识别技术
该研究采用图像识别技术实现隧道内的烟、雾、火、温度的感测,通过报警系统及时提醒行人隧道内的情况以及车辆信息。能够对雾天、雨天、不同光线下的图片进行处理、识别,正确地识别图像中的车辆、车牌、行人,并对行车信息进行保存,方便后续的查询、跟踪。行人通过无线蓝牙通讯,当行车接近该研究时,可通过手机、PDA与该研究进行无线通讯,用户通过手机或PDA获知该研究的信息[9],更进一步地了解该研究的存储信息。
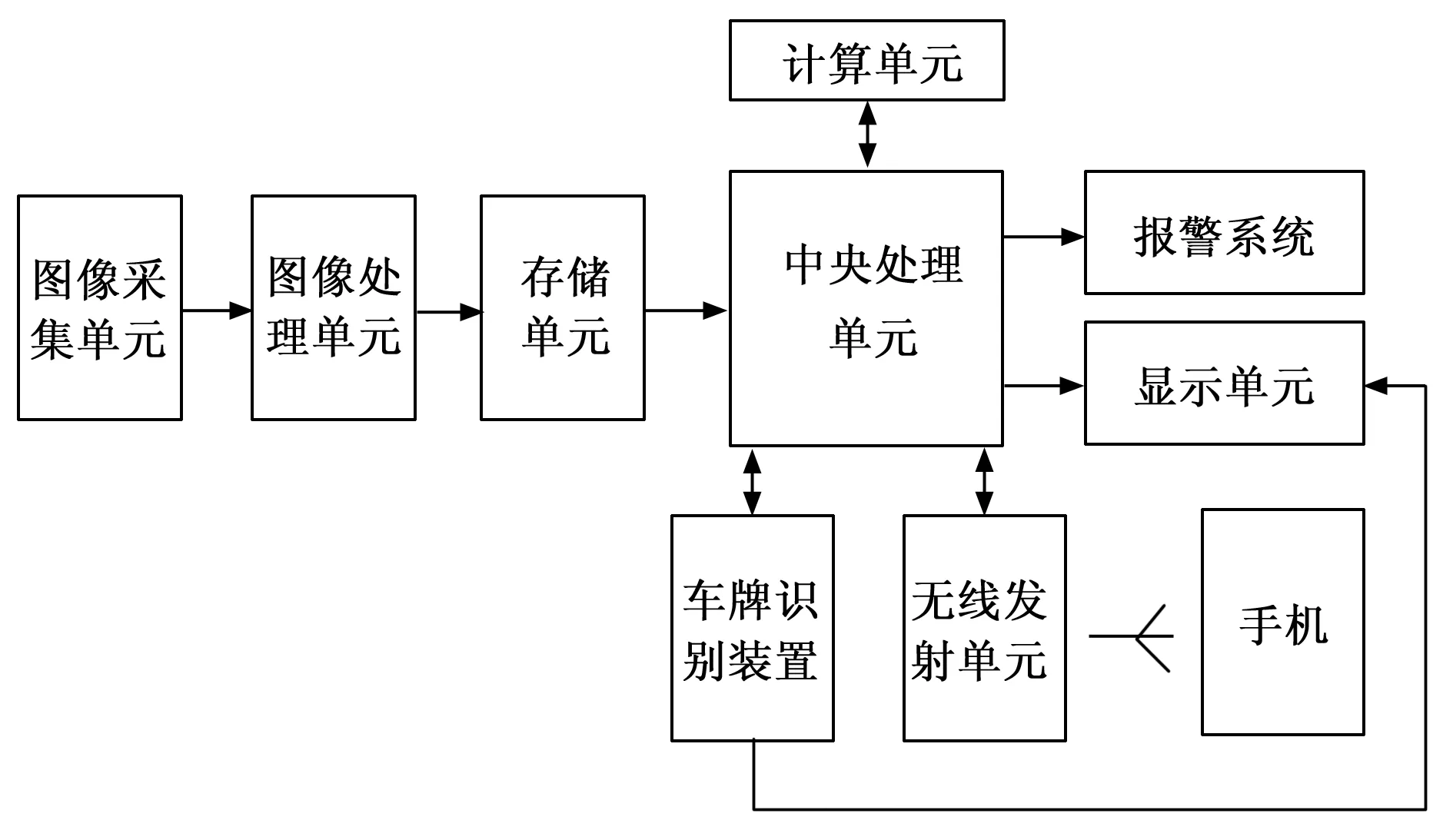
图2 隧道工程图像数识别原理架构图
图像采集过程是在光源提供照明的条件下,数字摄像机拍摄目标物体,并将其转化为数字图像信号,最后通过图像采集卡传输给图像处理单元。在进行车辆车牌识别时,车辆驶入时,图像采集单元首先对车牌图像采集,然后对车牌图像预处理,进行去噪,图片更加清楚,在对车牌图像进行分割,然后对车牌图形中字符识别,将是识别后车牌图形中字符存储,通过显示单元将车牌图形中字符显示。
在图像采集环节,一般通过CCD摄像头与视频卡直接连接完成的,在图像采集过程中,外界环境可能受恶劣天气、光照不均、亮度低、对比度太小、倾斜等影响,这些都会影响车牌字符的分割而降低了车牌识别率。对车牌进行预处理就是提高图片的识别率。
目标图像识别单元为基于SPCA563B芯片的图像识别单元,能够对目标图像提取单元提取的图像进行识别,对图像进行处理、分析,该单元具有图片识别与处理能力,其提供320*240的8位CMOS图像传感器接口,具有自动白平衡和获得参数控制功能,具有图像颜色校正和图像Gamma校正功能,同时也具有良好的减少噪声的滤波器[10-11]。
报警系统包括报警按钮、与所述报警按钮通过总线串联连接的感烟探测器、感温探测器、火焰探测器。所述中央处理单元设置有主板,所述主板上设置有主频为1.86 GHz的Intel Atom D2550处理器。
在该研究中,特征匹配目标计算单元是采用利用目标的局部模板在当前帧进行匹配获取目标候选区域,利用改进的距离加权彩色直方图计算候选区域与局部模板的相似度,结合直方图的相似度和卡尔曼预测确定目标的位置。在具体实施例中,在进行特征匹配时,首选要判断目标的运动状态,比如,新的行车目标的出现、旧的行车目标的消失、目标匹配、目标分裂以及目标之间的相互遮挡,在该实施例中,利用目标的运动特征建立数据关联矩阵判断目标的运动状态,然后对各状态分别进行针对性的处理[12]。
在进行目标跟踪前,需要检测出场景出现的目标,在具体应用中,通过目标检测模型进行目标检测计算,为了能够实时对目标进行跟踪,在具体应用中采用背景建模来提取摄像机场景中的目标轮廓,实用混合高斯计算模块对视频场景进行建模,利用背景减除单元提取前景目标,然后利用形态学滤波器关联断裂的目标并去噪声,最后根据场景中目标的尺度阈值过滤掉尺度较小的目标,最终获得当前帧出现的运动目标的轮廓外接矩形。根据外形特征,再调用模板进行匹配,在匹配过程中,由于各模板中的前景和背景的像素比不同以及各模板尺度差异等因素,使得仅根据匹配度确定最终匹配区域是不合理的,模板匹配的最有匹配区域仅仅只能作为候选区域,因此为确定目标的位置,还需要结合目标的其他特征进行精确匹配。与其他特征(比如,纹理、梯度直方图等)相比,目标的颜色特征对图像的尺度、方向、视角的依赖性较小,在该研究一个具体实施中,采用颜色特征对模板匹配的结果进行进一步的精确匹配[13]。
图像处理单元可以不仅可以处理图像,还具有视频图像处理的功能,图像处理单元利用计算机视觉技术与数字图像处理技术能够处理道路上交通监控的实时视频图像信息,达到运动车辆自动检测、运动状态预测、车辆自动跟踪等目的,从而自动快速检测车道变换、超速、慢速、停止、交通阻塞等事件及进行车型、平均车速等交通参数的统计,并自动记录相关数据。
1.2 多传感器数据信息融合模型
由于巡检机器人采用多种形式的传感器,需要对采集到的数据信息进行融合,以提高数据采集和处理能力。多传感器数据信息融合模型,如图3所示。
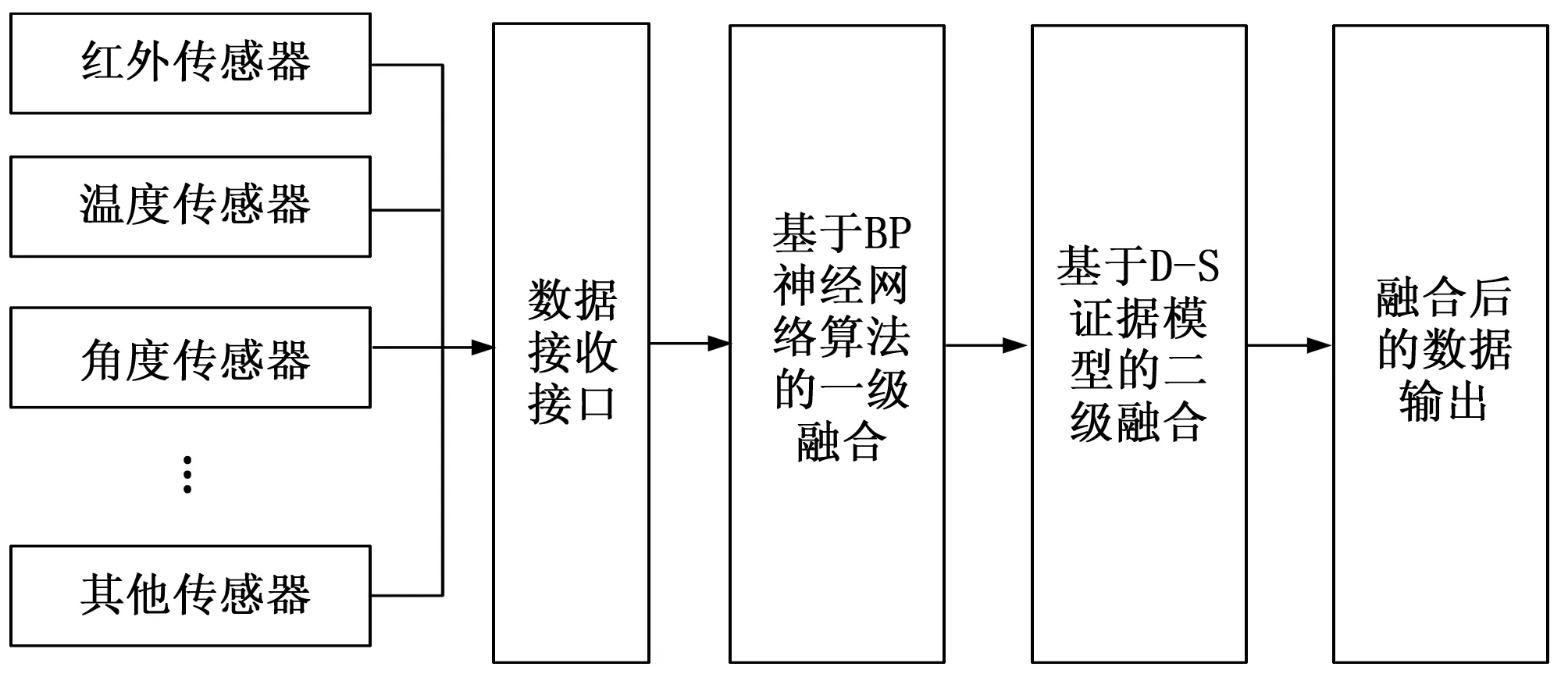
图3 多传感器数据信息融合模型
设多种传感器输入的数据信息集合记作为W={xi},融合后的输出传感器指标数据结合为H={1,2,…,N},多种不同的数据传感器数据点xi和xj信息之差距离为Dij,为了提高不同传感器数据处理能力,将不同数据传感器数据之间定义为距离Dc,通过这种方式进而输出隧道运维数据信息集中,然后选择隧道运维采集到的不同数据中心点的局部密度特征量ρ[14],通过以下函数表示:
(1)

(2)
式(2)表示(Mi,Kj)神经网络算法模型中的网络权值,χ为神经网络算法模型中的阈值,αi为神经网络算法模型中的数据输入节点,βi表示为神经网络算法模型中的隐含节点,εi表示为神经网络算法模型中的输出节点,τ为神经网络算法模型中的加权因子,υ表示为神经网络算法模型中的步长[16]。
所有传感器融合后的数据信息的误差公式可以为:
(3)
由于输入层中特征参数不同,维度也不同,用ω表示。其中用I={I1,I2,…,In}表示为神经网络算法模型的输入层神经元,则经过一次数据融合后的数据信息表示为:
(4)
然后再进行二次数据融合,采用D-S证据模型能够将多种建筑运维数据信息实现全局融合,提高数据信息的融合度,假设存在m:2S→[0,1],基本概率分配函数用识别框架S表示,在函数方程中,存在基本可信数m(B)∈[0,1],在该函数方程中,数据的概率分布存在这样的数据属性:∀B⊆S。由于隧道运维中各种证据数据信息来源不同,则会输出n个不同的隧道运维可视化基本概率分配函数[17],在多种数据传感器输出后的信息中,m1,m2,…,mn分别表示相同识别框架S上不同隧道运维信息,则输出的多信息融合模型可以通过以下公式表示:

(5)
其中的Q为D-S证据模型中的冲突权值。当Q≠1,表示D-S证据模型中输出的证据不同,当Q=1,表示D-S证据模型中的证据存在冲突行为。
通过上述二次数据融合,实现了多种传感器数据信息的融合。
1.3 基于GIS技术的可视化仿真
本研究利用GIS技术设计动态可视化仿真模型,其中针对于模型进行变形处理,通过对组成元素进行坐标变换,使三维模型在屏幕上以二维图形进行显示,通过实验控制器进行设计合适的用户界面,分析用户输入的内容提供合适的响应方式。
在对隧道数据进行分析的过程中,本研究采用层次模型的细节生成方案,方案通过设计一种均匀的高度场来对隧道进行处理[18],分析建立隧道矩阵,在水平二维空间中建立空间坐标系,其中高度通过空间坐标函数z(x,y)来表示。
在模型建立的过程中需要分析真实空间中的坐标到模拟建立的模型中的坐标过程中发生的偏差。其中在获取真实坐标时需要对其进行测量,这将可能发生一定的偏差;在模型投射到屏幕上的图像同样会发生误差。
在真实空间坐标测量误差中,由于不同高度场中的物体通过测量获取其与原点之间的偏差,可以计算出不同空间位置的坐标变换[19]。通过分析各个点之间的偏差,其中递增的误差如式(6)所示。
(6)

(7)
如式(7)所示,其中Di,j表示为通过对三角形进行递归对分法所产生的子节点构成的数据集合,就可以得出采用该方案进行误差处理,可以使其在构成的菱形图案中需要所产生的误差缩减为i与其子集之间的最大误差之间[20]。
在针对于计算屏幕空间的误差问题,本研究选择通过分析视觉方向和坐标与视觉点的距离进行屏幕误差分析,该方案可以通过更小的计算量实现误差的计算。其中投影误差分析图像如图4所示。

图4 屏幕投影示意图
如图4所示,该图像表示为一个立体物体在屏幕上进行投影,其中屏幕的长度为L,其人物视角的张角为α,需要被投影的线段长度为ε,人物视点与进行投影的物品之间的距离为d,其中几何变换形式公式如式(8)所示。
(8)
如式(8)所示,通过透视投影对模型数据进行投影,可以得出随着视点与投影物品之间的距离逐渐变大,其投影误差将会变小[21]。假设线段在屏幕中的投影长度为ρ,那么其的长度如式(9)所示。
(9)
如式(9)所示,其中表示为屏幕中线段在屏幕中所占的像素数。因为式(3)所设计的函数进行投影是进行投影到一个圆上,需要一个参数对其进行调节,使其变换成为一个平面投影[22-24]。本研究设计的GIS的可视化仿真是通过数据采集模块进行采集相关地理和事物信息,通过采集的信息设计合理的分析模型,其基于GIS技术的动态可视化模拟仿真系统如图5所示。
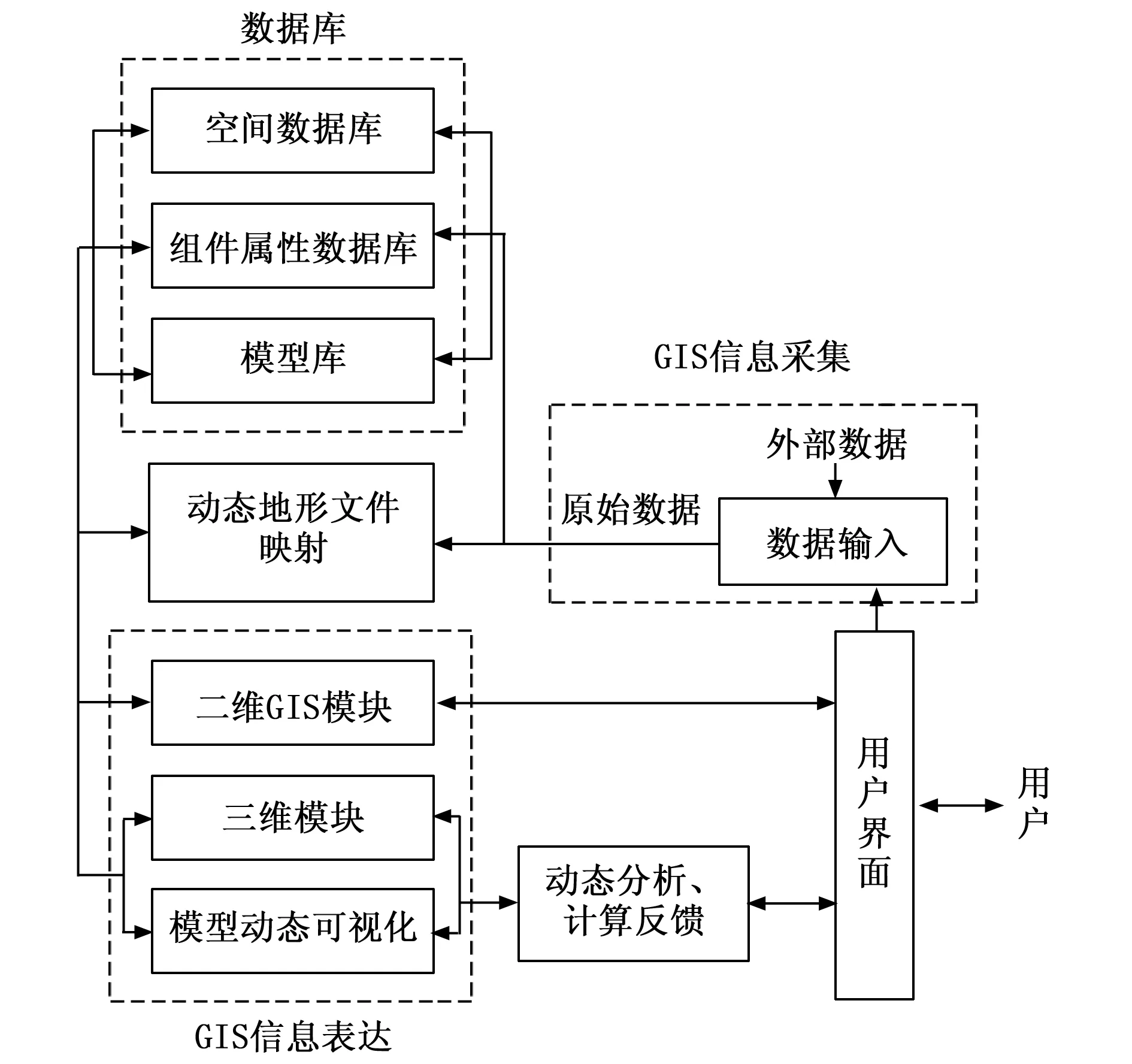
图5 基于GIS技术的动态可视化模拟仿真系统
如图5所示,本研究设计的动态可视化模拟仿真系统利用图像采集系统采集原始的外部图像数据,通过数据输入接口输入数据库中,通过对采集的图像信息进行处理,分析图像中所包含的各个组成元件以及其的相关属性[25],并建立其空间中各个组成元素的空间坐标建立空间数据库,并根据实际采集的图像数据进行分析进行各个组成单元的虚拟模型,通过在动态的隧道文件夹中进行空间坐标的内存映射,利用二维的GIS技术进行模拟仿真分析,并且利用数据库中的相关数据建立三维模块,分析建立的三维模块实现三维的可视化数据处理模型[26]。
当利用GIS技术建立数字模型需要分析空间中各个组成单元之间在时间的交互关系,以此建立一个多组成单元相关交织形成的三维模型,该三维模型通过建立一个能够真实反映工程进度的静态和动态的时空信息的三维数字模型[27],以此实现隧道工程的可视化仿真。
在对地理信息建立数字化建模时常采用不规则的三角网模型和规则的网格模型进行分析。其中不规则的三角网模型通过在隧道中设计选取不同的坐标点,利用坐标点之间进行连接,对隧道的全面覆盖,其中各个三角网之间完全不覆盖,通过三角网的变化体现出隧道的高低变化[28]。规则网格模型通过利用大小相同的栅形网格完全的覆盖地面,以此表示较为平坦的地面。用于大型隧道较为复杂,因此本研究选用不规则的三角网模型对隧道进行建模,其中针对于静态的隧道数据的流程如图6所示。
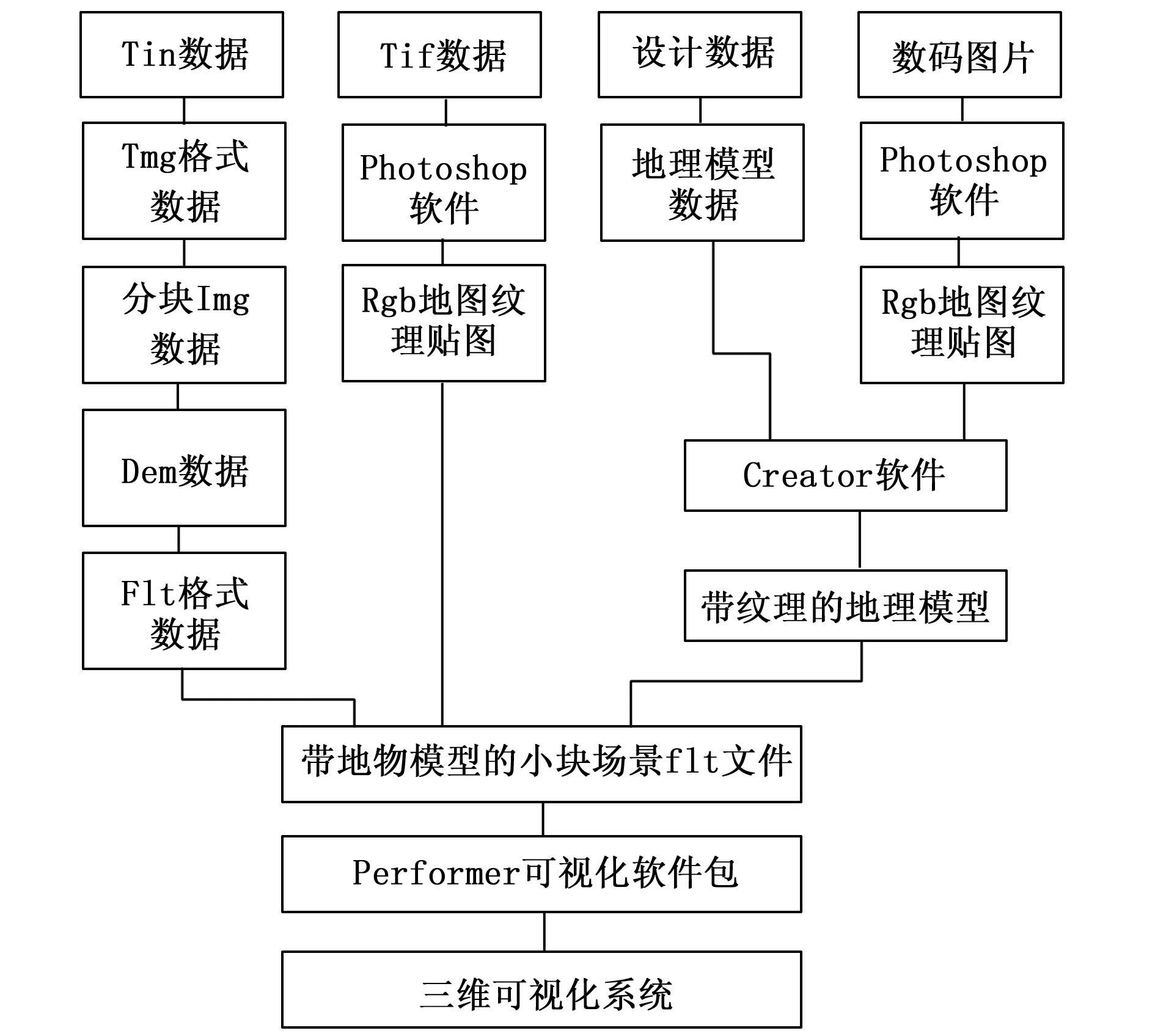
图6 静态隧道处理流程图
如图6所示,本研究通过航拍等图像采集方案采集大量的地貌图像和组成单元进行建立虚拟模型,通过相应的数据转化工具将采集的地貌数据转化成为建立的模型数据和贴图数据,通过模型数据建立建筑建设空间的三维模型,之后利用采集的图像分离出来的贴图对建立的三维模型进行贴图,以此实现静态三维隧道模型[29]。
2 模拟仿真
为了分析本研究设计的巡检机器人监管方案的可行性,本研究通过分析不同情况对算法所造成的影响,通过选择某地的一组隧道数据进行检验[21]。在本次实验中所选取的计算机模拟环境为:选用Windows 10作为操作系统平台,设置计算机内存为32 G,Intel Xeon W-2145 CPU 3.70 GHz,本次模拟仿真实验的软件选取matlab 7.0软件,在本次实验中选取某市某地选取一组1 025*1 025规格的网格隧道数据进行分析。获取的图像信息如表1所示。

表1 获取的图像信息表
实验设计将对比本研究系统智能识别方法与BP神经网络智能识别方法的识别准确率性能。实验方法识别距离均在50米内(设置超过20米为远距离),识别是否火灾(X1)、是否交通拥堵(X2)与是否隧道烟雾报警(X3)这3种情况,并从这3个隧道运维图像中随机选择了900张图像,对比不同方法在不同距离条件下图像识别准确率,BP神经网络识别结果图如7所示。
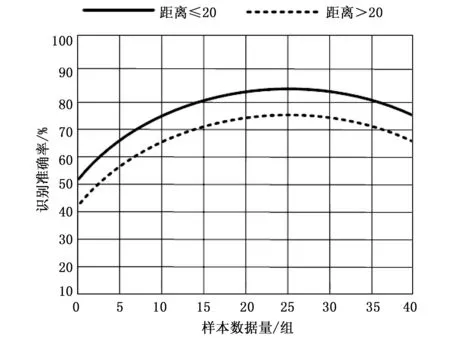
图7 BP神经网络识别准确率性能
从图7可以看出,BP神经网络的智能识别方法受到距离影响较大,在实验样本数据不断增加的情况下,识别准确率先是逐渐增加,然后逐渐减小,这表明BP神经网络的智能识别方法不能在大数据环境下进行智能识别,具有一定的局限性。相同条件下,关于本研究所用方法性能结果图如8所示。
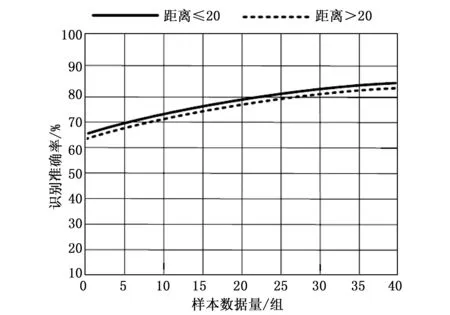
图8 本研究系统识别准确率性能
从图8可以看出,相对于BP神经网络的智能识别方法来说,本研究系统的智能识别方法在距离小于20 m与距离大于20 m的环境下,识别隧道运维的准确率相差微乎及微,并且,在实验样本数据不断增加的情况下,识别准确率逐步增加,最高达到了85%,具有良好的识别结果,从而证明本研究系统智能识别方法的有效性与适用性。
为了分析本研究设计的通过巡检机器人设计的可视化方案的效果,本次是通过采集用户对管理系统在视图细节准确性、视图反映速度和系统稳定性3个方面进行分析,并得出综合的评价得分,本次评价采用5个星级的评价标准,星级越高,用户的满意程度越高,并将本研究设计方案与BIM监管方案进行比较,其中用户对两种不同监管方案的满意度评价结果如图9所示。

图9 巡检机器人监管系统评价结果
如图9所示,其中黑色表示为对BIM运维管理方案的评价,白色的表示为本研究设计可视化管理方案,通过图像可以得出本研设计的可视化管理方案在3个评价指标中都高于BIM管理方案,其用户综合评价得分中本研究设计的监管方案得分提升了21%。
3 结束语
针对隧道工程的监管方案,本研究利用巡检机器人对运维场地进行自动化的巡检,通过利用构建多传感器数据信息融合模型对巡检机器人采集的数据进行分析,并利用三维模型为基础上实现运维项目进行可视化管理, 通过分析经过视觉点进行删减三角形空间单元的数量,可以提高模型的刷新效率,通过对各个不同的屏幕空间误差阈值进行分析,可以得知通过视觉点可以删减掉约50%的三角形空间单元。通过将本研究的巡检机器人监管方案与BIM监管方案通过用户评价进行比较,可以得出用户对本研究设计监管方案的评价得分比BIM监管方案高21%,因此本研究设计的可视化方案更能满足用户的需求。
综上所述可以得出采用本研究设计的模型生成技术可以提高可视化图像的生成效率和屏幕刷新率,用户对所设计的监管系统有更高的满意度,但是由于在真实情况运行较少,可能会出现细节性问题,需要更进一步的优化。
