基于传感器融合的农业机器人定位导航
2022-12-01肖正邦
肖正邦
(长安大学工程机械学院,陕西 西安 710064)
0 引言
随着科学技术的发展,机器人的发展越来越受到各个国家的重视,尤其是农业机器人[1-2]的发展和应用,因为发展农业是发展民生之本,在各行各业逐渐走向现代化的同时,农业领域的现代化和科技化越来越受到广泛的重视。农业机器人技术正在经历爆炸式发展,自主导航是农业机器人的关键技术。与无人驾驶汽车相比,农业机器人的工作环境复杂多样,导航方式和核心技术差异明显。实现汽车无人驾驶技术的关键是实施自主导航技术应用,自主导航也是农业机器人的核心和关键。农业机器人的自主导航主要从农场的大型田间种植模式、小规模和设施化的固定农业生产模式,以及大田作物的田间管理和收获作业进行研究。对于大型集中开放农场中的大规模田间种植模式,卫星信号稳定可靠,卫星定位技术已经成熟,农业机器人主要采用卫星惯性导向组合导航方法,许多研究人员通过卫星定位和惯性制导等附加传感器获得厘米级定位精度,完成轨迹投影,实现线性导航自动驾驶。但卫星导航不具备检测田间作物综合信息的能力,面对小规模、分散、区域化的农田环境,卫星定位导航的灵活性和便利性受到限制,无法使用。
动态目标中行人检测是自动驾驶感知系统中的一项关键技术。虽然目前基于视觉的行人检测已经获得了非常好的检测性能,但摄像头对光影很敏感。此外,它无法提供精确的位置信息。为了解决上述问题,笔者应用了LiDAR子系统来提取对象结构特征并训练SVM分类器,最终检测方法是将多个帧中的多个传感器信息与策略融合[3]在一起。LiDAR和摄像头传感器数据[4-6]可以提供深度和颜色信息,并通过elevation mapping算法实现建图,以实现农业机器人识别和无碰撞导航。
1 相关技术与理论方法
1.1 农业机器人平台
工业上常用自动化机械臂、可以自动驾驶的轮式平台等。因为历史原因,这些机电系统也被称为“工业机器人”“轮式机器人”等,因此“机器人”这个概念被泛化为一系列能够自动化执行某些任务的机电系统的统称。甚至把有些自动化的纯软件系统也称为机器人,比如聊天机器人、爬虫机器人等。
虽然机器人包罗万象,但是具有人类形态、像人一样运动和思考的“人形机器人”,依然是机器人学的终极目标,另外还具有四足动物或昆虫的形态、像这些生物一样运动的“多足机器人”。使用轮式的探测器进行探测,但是由于轮子的限制,探测器只能在平原地区行动,很难接触到山地区域,足式机器人会显得更有优势。这里使用实验室的六足仿蜘蛛机器人,采用仿蜘蛛的具有冗余自由度特征腿部结构,采用全向运动算法实现运动的多样性;机器人和视觉的结合让多足机器人对环境的适应性更强,能够实时进行环境数据信息采集和实地视频监控,具有越障能力,可用于人无法或不便到达的区域开展相关作业。
1.2 农业机器人应用场景特点
农业机器人[7-8]根据不同的操作环境可分为三类:第一类是田间生产机器人,主要用于田间耕作、种植、田间管理、收获等方面的操作;第二类是果园生产机器人,主要用于果园除草、施肥、采摘等方面的操作;第三类是温室生产机器人,主要用于温室移栽、嫁接等方面的操作。
1.3 基于视觉相对定位的定位导航
视觉定位自主导航是在农业机器人上安装视觉传感器[9-10],采集行驶方向前方的图像信息,通过预处理、特征提取分割、图像识别等方式,将视觉感知到的二维图像转换为三维空间信息,检测秸秆线/作物行,实现导航基线提取,确定农业机器人与农业机器人的相对位置关系所需操作路径,实时计算农业机器人在局部环境中的相对位置,并在规则地块或卫星信号模糊的环境中完成相对定位导航。它还能实时计算农业机器人在局部环境中的航向偏差和横向偏差,并在不规则的陆地或卫星信号阻挡环境中完成相对定位导航。
1.4 基于激光雷达相对定位的定位导航
激光雷达定位自主导航是对周围环境中点云信息的检测,通过点云对准、点云去噪等预处理,再通过分割、聚类等算法进行障碍物识别,利用分类、跟踪算法实现对目标点的检测,最后通过目标点与农业机器人本身之间的距离,结合测量角度,获得目标点的极点位置,实时计算农业机器人与拟合操作路径之间的航向偏差和横向偏差,完成农用机器人在行形特征种植环境下的相对定位导航。
1.5 基于激光雷达与相机融合的定位导航
多传感器融合的方法有LiDAR-RADAR(激光雷达-毫米波雷达)传感器融合,还有相机-相机融合检测、二维激光雷达-相机融合检测和三维激光雷达-相机融合检测等等。相机是检测目标或识别目标的非常好的工具,激光雷达更擅长准确估计目标的位置。
2 实验
搭建软硬件平台。硬件:NVIDIA Jetson TX2开发板、Velodyne-16线激光雷达、RealSense_D435i深度相机;软件:Ubuntu18.04系统、MATLAB、ROS机器人操作系统。
实验通过MATLAB或Autoware对Velodyne16激光雷达与英特尔RealSense_D435i进行联合标定,如图1所示。

图1 相机雷达联合标定
算法内容:获取相机雷达数据,通过ROS进行时间同步,将雷达点云实时地投影到图像,并对点云着色;处理融合后的数据,包括点云分割、聚类,最终实现实时定位,多目标实时检测,使用elevation mapping算法进行三维建图,如图2所示;在TX2开发板上配置环境,安装在六足机器人上,实现机器人实时定位检测,最终定位效果明显。
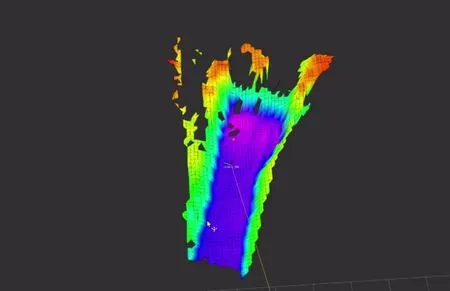
图2 elevation mapping三维建图
3 结论
本文设计出一种基于深度相机与三维激光雷达融合的农业机器人目标检测及定位建图的方法,使农业机器人通过传感器获取全局坐标信息或相对于环境的位置信息,可以完成自主导航,避障操作。使用多个传感器来提供冗余信息,以减少发生错误测量的可能性,解决了农业机器人在复杂环境区域中行走及定位检测的问题。
