一种四自由度上下料机械手运动学分析*
2022-12-01华群,陈舰
华 群 , 陈 舰
(1.江西现代职业技术学院,江西 南昌 330095;2.江西机电职业技术学院,江西 南昌 330013)
制造业的自动化程度正在逐年提升,未来实现全自动化将是必然结果。尤其是在恶劣环境下或者对高辐射危险品的机械加工过程中,实现无人的自动化加工已经迫在眉睫。而上下料的自动化又是实现机械加工自动化的重要一环,因此实现用机械手代替人工上下料势在必行[1]。本文提出了一种手腕能够始终保持水平的机械手结构,能够极大地保证上下料过程中零件的平稳转移和放置。
1 机械手设计及原理
该机械手是由具有三个自由度的手臂和一个绕Y轴旋转自由度的手腕构成,如图1所示。该手臂部分是典型的关节型机械臂(RRR),三个关节轴可分别被指定为腰、肩和肘。在手臂的运动过程中,无论手臂如何移动,该机械手的手腕部分都能够一直平行于水平面。这个功能是依靠两个平行四边形连杆机构实现的[2]。如图2所示,两个连杆机构分别是平行四边形ABCD和平行四边形CDEF。
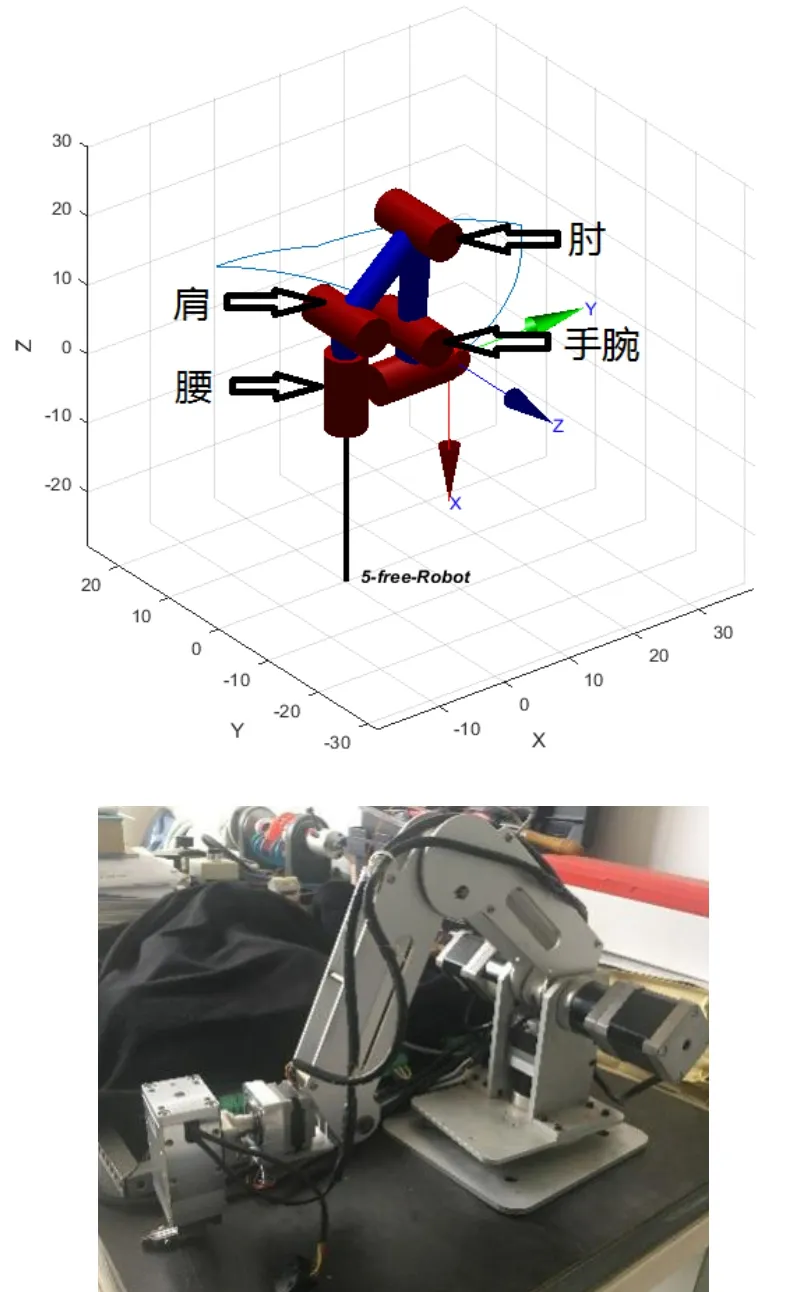
图1 四自由度机械手
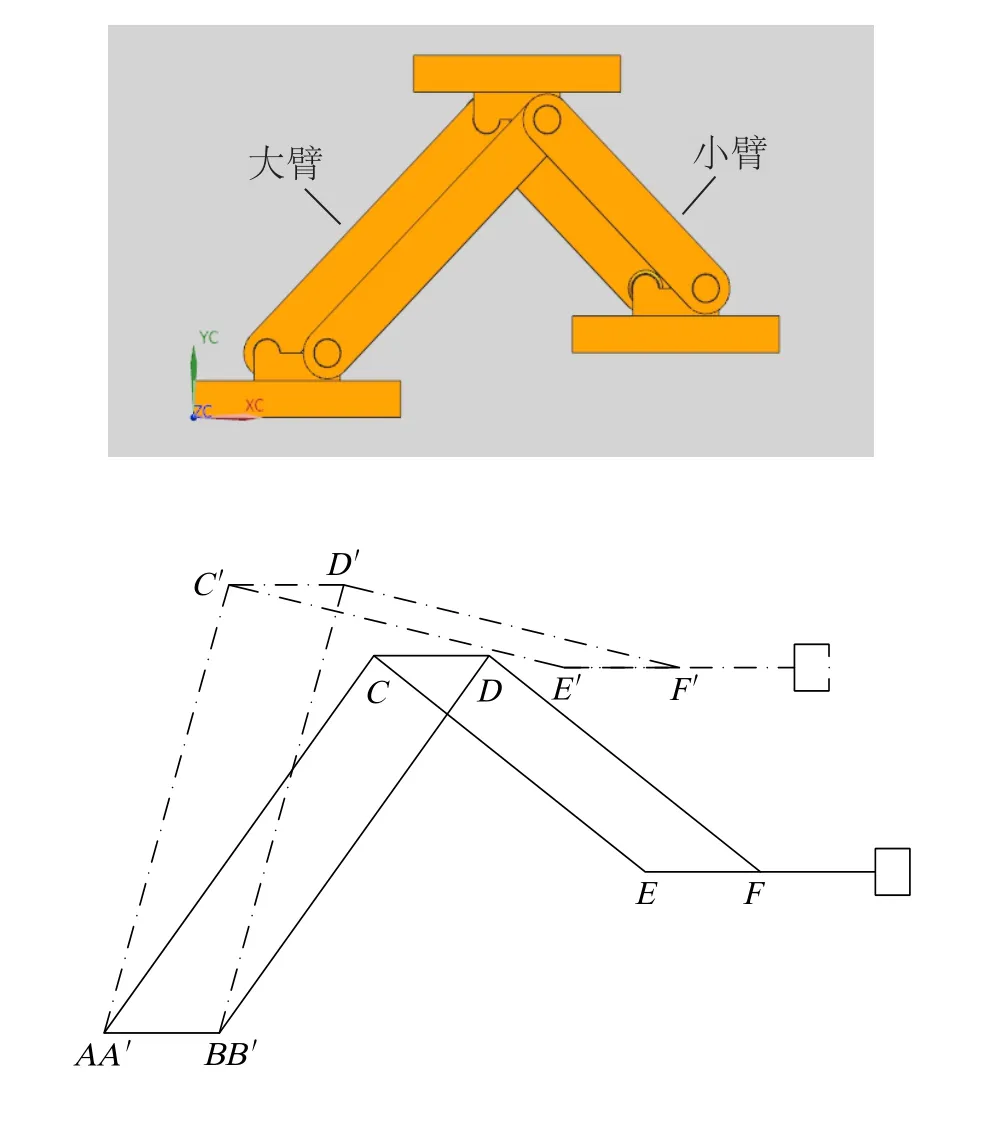
图2 平行四边形连杆机构原理
当连杆AC和连杆BD绕AB轴转动到A′C′和B′D′位置时,末端执行器EF也移动到E′F′的位置。由于两个平行四边形共CD边,所以E′F′//C′D′//A′B′。同时由于AB//CD//EF,A′B′=AB,所以E′F′//EF。所以末端执行器会一直平行于基座,保证末端手腕的水平[3]。
肩与肘之间的大臂和肘与手腕之间的小臂就是这种平行四边形连杆。该机构不但能够实现手腕始终保持水平状态,而且肘部的旋转电机可以装在肩部,小臂可以变得更轻便,降低了对电机驱动力的要求。
2 机械手运动学分析
2.1 坐标系建立
采用D-H(Denavit-Hartenberg)参数法建立机械手的运动模型,在这个模型中先忽略机械手连杆中的四边形机构,释放手腕中被它限制的一个自由度。所以在这里,可以建立一个五自由度的机械手连杆坐标系,如图3所示。从简图中可以看出5个关节都是旋转关节,其中O3关节就是手腕中被平行四边形机构限制的关节,该关节在实际工作中应该保证手腕始终平行于X1Y1平面。通过机械手连杆坐标系简图可以建立五自由度机械手的D-H参数表[4],具体参数如表1所示。
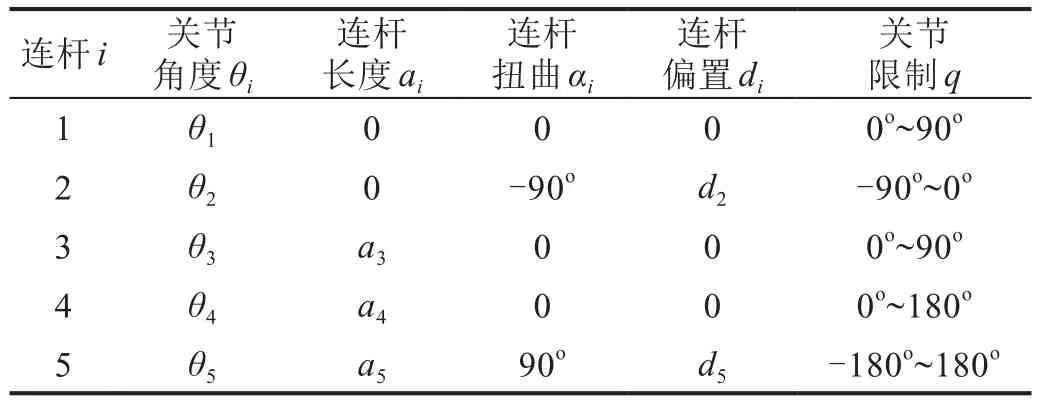
表1 五自由度机械手的D-H参数
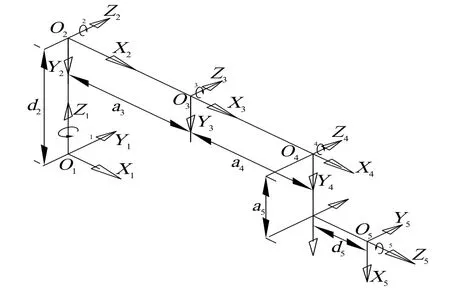
图3 机械手连杆坐标系简图
由于手腕中的θ5关节不影响手臂的位姿,而且θ4关节角度受到θ2和θ3控制,即:
所以通过前三个关节变量就可以决定机械手的最后位姿[5]。
2.2 规划运动轨迹
根据实际工作中机械手的操作步骤,制定机械手的运动轨迹。首先对机械手位置进行初始化,即回到图1的姿态。此时,末端坐标系原点的世界坐标为(X1,Y1,Z1)。第一步,移动到需要被装夹的工件坐标上(X2,Y2,Z2);第二步,将工件沿世界坐标系的z轴夹起h高度,此时末端坐标系的世界坐标为(X2,Y2,Z2+h);第三步,移动到加工机床附近,并将工件转动90o,坐标为(X4,Y4,Z4);第四步,将工件放入爪,绕世界坐标系的z轴旋转到90o的位置,坐标为(X5,Y5,Z5)。第五步,回到初始位置[6]。
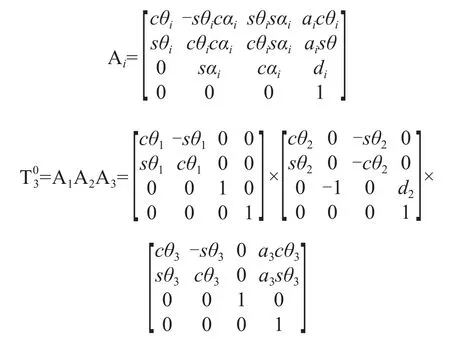
因此,第一步中初始位置姿态为:
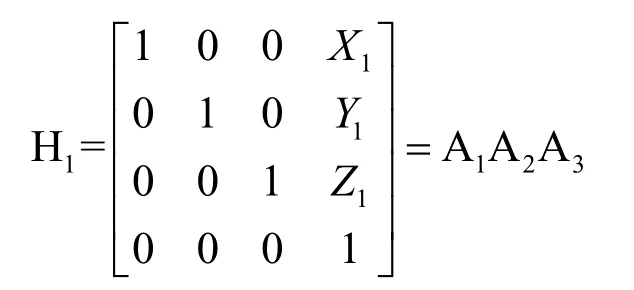
这里通过解16个方程组可以得到θ1,θ2和θ3的解[7]。
通过代入参数,用MATLAB画出机械手的运动路径[8],如图4所示。其中各参数如下:
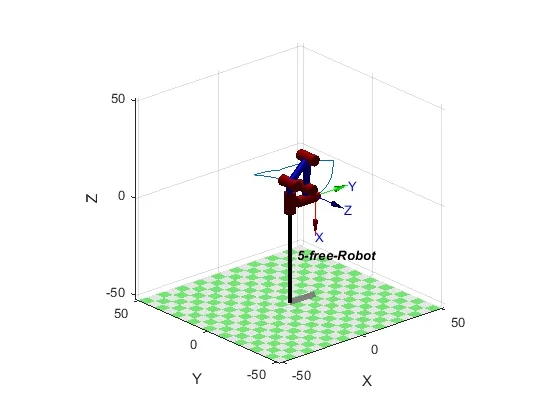
图4 机械手末端运动轨迹

2.3 速度运动学分析
通过机械手的雅克比矩阵来制定机械手各个位置姿态之间的路径,可以形成比较光滑的路径,如图4所示,各个位置姿态之间的路径都是用一条光滑曲线连接的[7]。接下来分析一下各个关节转动的速度与加速度,如图5所示。
图5中分别分析了四个关节角的运动学特征,其中关节4为约定的限制关节,没有自由转动的能力,所以这里分析四个关节就可以。关节1转动范围大,速度和加速度都比较高,所以关节1的电机要求也比较高。关节2的运动范围小,速度波动频率大,需要电机的精准控制。关节3与关节2类似,主要用于精准定位。关节5的主要功能是改变工件的姿势,运动方式固定,在工件不重的情况下,可以用比较小的电机,减轻机械手末端的重量[9]。

图5 关节角的运动学特征
从图5中还可以看出,每一个阶段中,每个关节的运动曲线都是连续光滑的曲线。每个关节电机的速度和加速度在每一步中都是从0开始,到0结束,极大地减小了每一步运动过程中关节受到的冲击力[10]。所以,在每一步的运行中,关节电机都能够平稳连续工作,证明了该路径规划的可行性。
3 结论
本文提出了一种由平行四边形机构连杆组成的四自由度机械手,并对其进行运动学分析:
1)通过对它的结构原理分析,采用D-H参数法进行数学建模的方式,用增加一个自由度的方式代替平行四边形连杆机构。
2)再运用MATLAB建立机械手仿真模型,验证了之前代替方法的可行性;并通过正逆运动学仿真分析来规划机械手的运动路径。
3)分析了规划路径中各个关节的角速度和角加速度变化曲线,验证了机械手工作的稳定可靠性。
