遥控消毒机器人的研究与设计*
2022-12-01杨艳山施苡波秦昌友苏士利
杨艳山 , 施苡波 , 秦昌友 , 苏士利 , 王 锋
(苏州农业职业技术学院,江苏 苏州 215008)
目前,疫情防控工作仍然是社区及防疫部门的重点工作之一[1]。国内防控、消毒手段主要是采用人工消毒,智能消毒还未正式起步[2]。市场上有很多概念型的消毒机器人,但防疫机器人的实际应用效果并不理想,在后续疫情防控工作中,仍会长期采用人工消毒方式[3]。本文设计的消毒机器人,能够很好地解决狭窄空间内消毒防疫作业难度大的现实问题,对保护环境以及作业人员健康有着重要意义,而且能够助力消毒防疫设备实现国产化[4-5]。
1 消毒机器人的关键部件
1.1 行走轮的选择与设计
目前,市面上主要使用的是OMNI轮和麦克纳姆轮,考虑本课题的设计要求与成本,使用麦克纳姆轮作为行走轮,采用四轮式布局的消毒机器人如图1所示。麦克纳姆轮具有万向性和平稳性,可以使机械运动转向轻松,能够保证消毒机器人的底盘移动的灵活性,使消毒机器人更容易完成远程控制的指令;在狭窄的室内消毒中,选择麦克纳姆轮作为行走轮,可以实现复杂的远程轨迹控制,满足前进、后退、平移、转弯以及旋转的运动需求[6]。

图1 遥控消毒机器人
1.2 行走机构的设计
轮系的布置主要影响消毒机器人的稳定性和负载量[7]。行走机构安装在整个消毒机器人的底部,由电机驱动的麦克纳姆轮构成,4个麦克纳姆轮由4个电机单独驱动运行。为保证消毒喷湿的远程遥控控制,在消毒机器人的工作过程中,行走机构、喷湿装置和控制系统均使用蓄电池作为动力源,动力源安放在车架内部,可以持续供电。
1.3 消毒机构的设计
本文采用三孔气液混式雾化喷头,同时满足消毒液的雾化和扩散要求,在直流风机的作用下,空气由喷头的后端被吸入,在内部形成高压,经前端间隙形成涡流,在风口处分流后,由出风口喷出消毒液。此过程中,消毒液形成雾滴,随气体喷出至大气中,实现消毒液的雾化与扩散,呈锥形态[8],喷头的参数如表1所示。
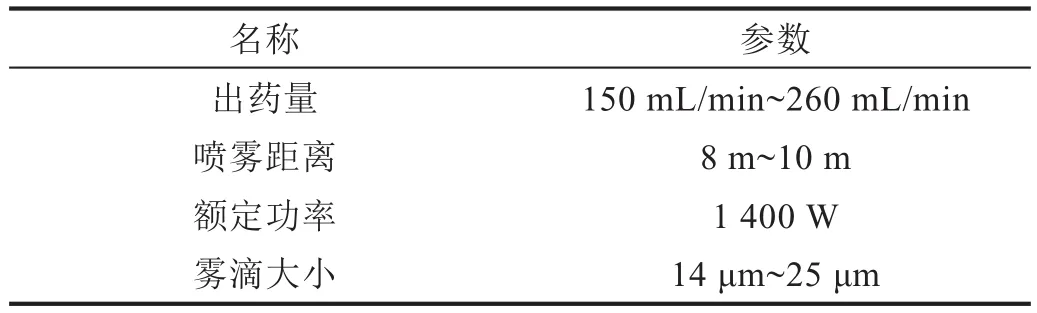
表1 消毒机器人喷头参数
2 消毒机器人的控制系统
2.1 硬件设计
远程遥控装置,是将工作人员的指令以无线蓝牙的传送方式送达从端控制系统的装置,本文选用的是MC6C遥控装置。
遥控装置的按钮和摇杆实现对消毒机器人的动作控制,包括前进、后退、平移、旋转、开始和停止;内部装有电位器,在消毒机器人转弯时,工作人员可以通过电位器实现改变转弯半径的效果[9]。
配合使用从端控制系统与遥控系统可以接收遥控装置发送的控制指令,并且将其转换为符合Modbus协议的代码,从而实现对消毒机器人的蓝牙无线操控。从端控制系统的组成如图2所示。

图2 从端控制系统的组成
消毒机器人的无线遥控系统结构图如图3所示,两块蓝牙模块通过GC-05建立无线连接,再传输到从端控制系统的单片机,指令核验无误后进行译码,传输给Modbus控制板,控制板对驱动器进行控制,实现消毒机器人的蓝牙控制[10]。

图3 基于蓝牙的遥控系统
本文从端部分采用12 V供电、100 Ah的电瓶供电,遥控部分采用9 V干电池电源,整体电路如图4所示,整体采用稳压芯片。电池由P3端子供电,S3自锁开关后,通过稳压器LM7805为单片机提供5 V电压,后经稳压芯片ASM1117-3.3V为蓝牙模块供电,二极管D6、D7是电压的指示灯[11]。
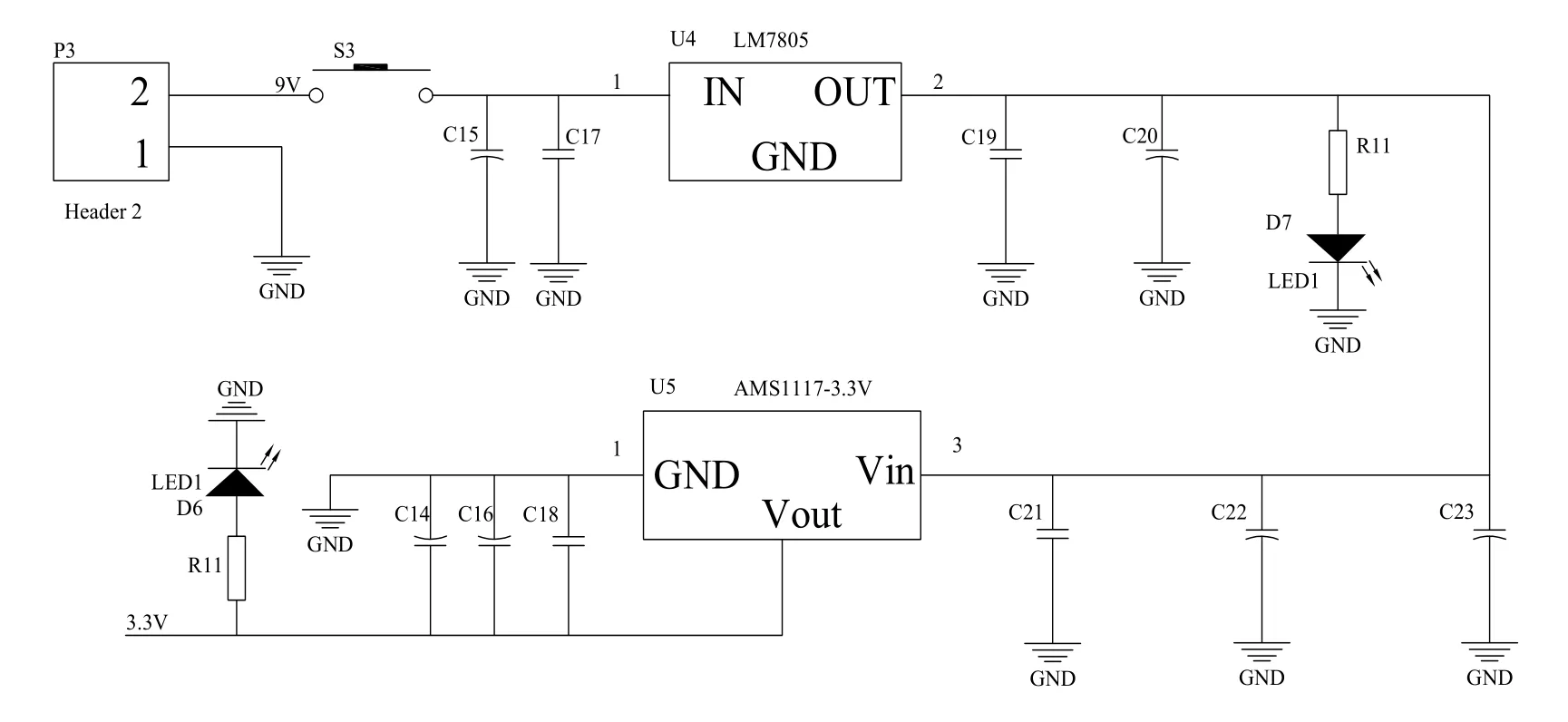
图4 系统电源电路图
2.2 软件设计
远程操控系统使用8位的A/D转换,连续对电位器进行6次A/D转换,6次数据进行去极值滤波,在定时/计数器1中断服务程序中完成A/D转换功能的重新使能。
在第6次A/D程序中进行远程遥控系统的按键扫描,对按键的输入I/O进行读取、移位等操作,按照预定的指令帧,实现后退、前进、左右转动、变速等指令。
从端单片机接收程序,从端蓝牙模块接收指令是通过串口传输实现,本文采用实时帧识别方式,省去了数据缓冲区的管理时间,起到了减少存取次数的作用,能够显著提高程序的实时性,极大减少占用CPU的资源。其串口中断服务程序流程图如图5所示。
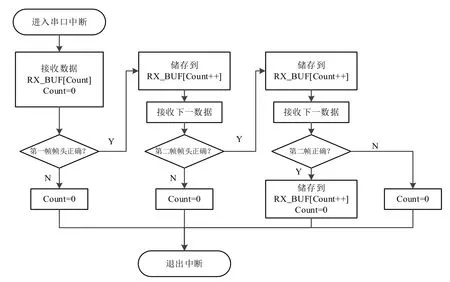
图5 串口中断服务流程图
3 实验与测试
在完成遥控消毒机器人的机械结构和控制系统设计的基础上,接着对其进行组装,根据小车三维模型结果加工车身结构,适当地组装其中的各部分,如电机、驱动器、消毒机构、控制系统等,从而实现遥控消毒机器人的装配。
为对遥控机器人进行测试,进行“8字形”和“X字形”两种路径任务测试,并对测试过程中的运动状态数据进行分析。
这种任务的具体含义为运行过程中小车的运动轨迹为“8字形”,运动过程中直行和旋转,路线为1—2—3—4—5—6—7—8,如图6所示。
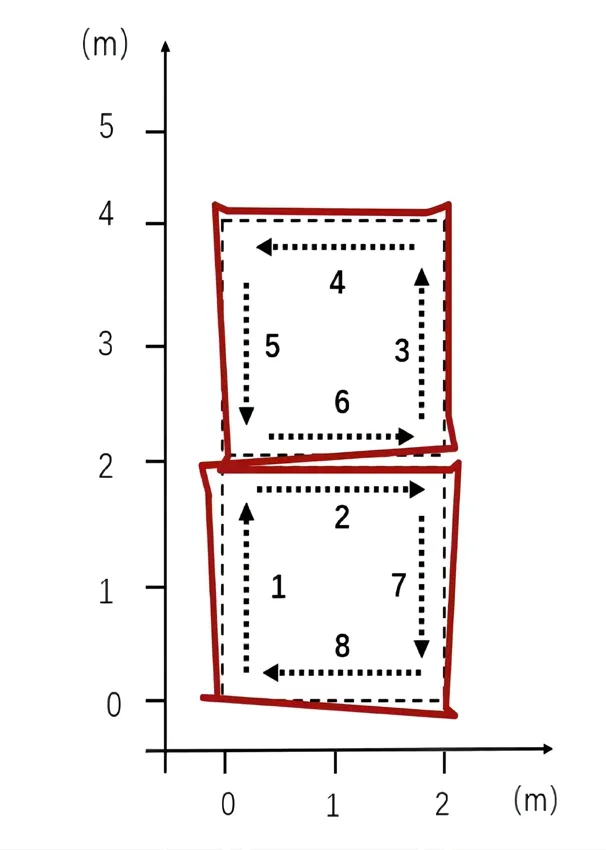
图6 “8字形”路径实际运动轨迹
完成遥控消毒机器人设备设计组装与测试之后,将现有设备投入目前楼宇间进行疫情防控消毒作业。遥控消毒机器人在既定任务下圆满完成消杀作业,用事实验证设备具有实用性以及可靠性。
希望本文研究设计的遥控消毒机器人能为今后消毒设备的研发打下基础,也希望本文的研究为该领域的进一步发展起到参考作用。
4 结论
本文基于我国室内消毒作业的实际情况,以及国内外智能化消毒设备的调查研究,结合消毒设备的使用现状和存在的问题,通过查阅资料、设计手册,归纳消毒机器人的设计思路,设计了一款依靠蓝牙无线遥控的消毒机器人。利用SolidWorks三维软件,设计了重要的机械部件,包括麦克纳姆轮和车身;重点设计了控制系统,包括硬件电路和软件开发,选择了MC6C无线遥控装置,确定了选用的基础蓝牙模块和单片机模块;通过本设备的通信设计,设计了所需的硬件电路、外围电路和软件运行流程,并设计介绍了系统主要程序段,最后进行了消毒机器人的运行测试,证明设备具有实用性以及可靠性。
