无位置传感器无刷直流电机控制系统设计
2022-12-01陈博翔李宇喆唐校宋跃
陈博翔,李宇喆,唐校,宋跃
(东莞理工学院 电子工程与智能化学院,广东东莞,523808)
1 无刷直流电机简述
随着电子技术及永磁材料的发展,无刷直流电机凭借自身电子换相的优点避免了直流电机换相火花大,机械寿命短的缺点,同时保留了直流电机良好的机械特性。对于无刷直流电机的控制,一般分为方波控制、直接转矩控制和磁场定向控制。方波控制为比较传统的控制方案,具有算法简单,成本低等优点,但也存在着转矩脉动大、电机效率低、控制精度低以及电流噪声大等缺点,随着处理器计算能力的增强,磁场定向控制凭借优越的控制性能和较高的效率,逐渐成为无刷直流电机控制的主流方案。图1为无刷直流电机控制原理图。
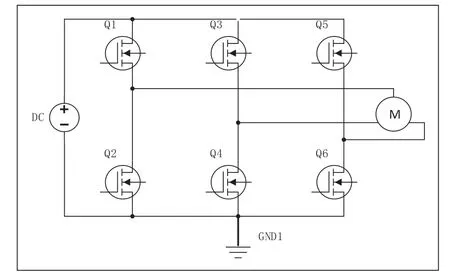
图1 无刷直流电机控制原理图
2 无刷直流电机的矢量控制
无刷直流电机的矢量控制又称磁场定向控制(FOC)。矢量控制一般是通过ABC三相电流采样,并经过坐标轴变换,即Clark变换、Park变换得到旋转坐标轴下q轴电流和d轴电流,而后计算误差并通过PI控制器得到Ud和Uq,其中q轴电流的给定值由速度环路的输出得到,为实现力矩最大化,一般将d轴电流的给定值设定为0,再经过Park逆变换得到Uα和Uβ,最后通过调制输入到三相逆变器,从而实现无刷直流电机的控制。调制方案一般有SPWM和SVPWM等算法,相较于SPWM,SVPWM有更高的直流侧电压利用率,能达到更高的效率,因而本次设计采用SVPWM为三相逆变调制算法。Park变换及Park逆变换中需得到电机的电气角度,电气角度的获取是磁场定向控制的核心。图2为电机速度闭环的矢量控制系统框图。
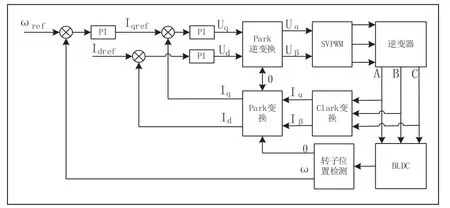
图2 电机速度闭环控制矢量控制系统框图
3 滑模观测器
滑模观测器是一种非线性观测器,鲁棒性强,对于参数和干扰的敏感度低,观测器是由软件实现,不受外部物理环境影响。滑模观测器的本质是状态重构,利用测量数据作为输入,计算后使输出值近似于系统的实际值。
在本文的控制策略中,通过观测电流与反馈电流的误差进行设计滑模观测器,并由误差重构反电动势,得到电机位置转速信息。
3.1 滑模观测器的设计
在静止坐标系下,基于无刷直流电机的数学模型,可以得到电机的电压方程如下:


根据式(1)电压方程,改写可得电机电流的状态方程为:

为了获得Eα和Eβ的估计值,将滑模观测器设计为以下形式:

由式(3)和式(4)可得电流的误差方程。

传统的滑模观测器设计滑模控制律为:
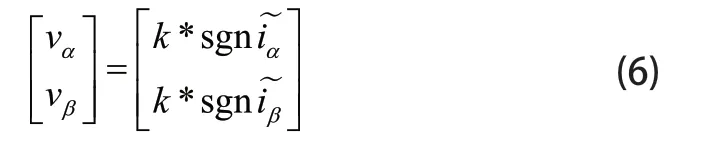

3.2 滑模增益的确认
式(6)中的k值为滑模增益,滑模增益k的值决定了观测电流值能否收敛成实际电流值,以及收敛速度。工程上很多使用经验试凑的方法来获取滑模增益k,而经验试凑法在不同模型下,需要有较长时间调试,且调试过程中,参数选定的不当会对硬件系统造成损坏,故本文通过推导的方式来敲定滑模增益k。
对于:


由式(5)和式(6), 式(9)可以展开为:




将式(12)和式(13)结合,可以得到:

如果k值满足式(14)所需条件,α轴上的观测电流就能收敛为实际电流值,并且一直保持在滑模面上。
对于β轴上的h值推导,与α轴上一样,在此处便不再赘述,直接给出:

3.3 转子位置的提取
由式(6)和式(7)可知,控制量和得到的反电动势是一个高频切换信号,对于转子电角度的提取,需要一个连续的反电动势估计值,故需要对所得到的拓展反电动势进行低通滤波。
当进行滤波处理时,拓展反电动势的估计将会有相位上的误差,这个误差会对转子位置的估算准确性有一定的影响,故在实际生产设计中,需要对滤波造成的相位位移进行角度补偿。
Eα和Eβ是在相位上相差九十度的正弦信号,故可以通过反正切的方法获得转子位置:

进行角度补偿,可得:

对于电机的控制,速度控制才是最终目的。而转速信息可以通过对式(17)进行微分运算得到。
4 控制系统的整体设计
本次系统设计基于Matlab/Simulink仿真。Simulink能对电机模型控制系统进行仿真,结果贴切实际,可以为理论知识验证现实的可行性。
磁场定向控制(矢量控制)是无刷直流电机控制系统的核心算法,在系统设计的过程中,先通过模型的真实位置及转速信息完成磁场定向控制,完成电流环路以及速度环路的稳定控制。在速度环中,电机速度的给定值为500r/min,速度环的输出值作为Q轴电流的给定值,因为D轴电流方向与电机磁极方向相同,为了提高控制效率,实现力矩最大化,D轴电流的给定值设置为0。
完成基于电机真实位置及转速信息下的无刷直流电机的电流环路及速度环路控制后,引入滑模观测器,并调试得到电机估计转子位置及转速信息,将滑模观测器的观测值引入环路,取代电机真实位置及转速信息,完成无刷直流电机在无位置传感器下的控制系统。
在本次设计中,电机的定子电阻设为2.8Ω,电机类型选定为表贴式电机,即Q轴电感和D轴电感一样,为8.5e-3H,永磁体的磁链为0.17Wb,电机的转动惯量为0.001 kg·m2,极对数为4。直流侧电压设定为311V,三相逆变电路选定IGBT作为开关管,其导通阻抗为1e-3Ω。速度环路的输出限幅为-20A~20A,Q轴的电流环路输出和D轴的电流环路输出限幅一致,均为350V。系统的开关频率为10kHz,电流的采样频率也为10kHz,实验的仿真时长为0.05s。
为了展示滑模观测器的可靠性,在系统中引入电机真实转子位置信息与滑模观测器的观测位置信息进行对比。
5 结果分析与结论
5.1 实验结果分析
图3为仿真模型观测到的电机速度波形,图4为电机估计转子位置与实际转子位置波形图,图5为仿真模型控制框图。
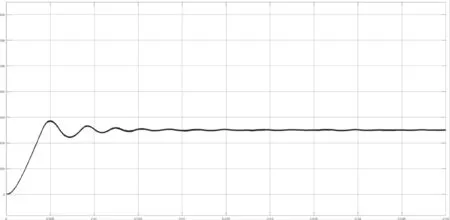
图3 电机速度
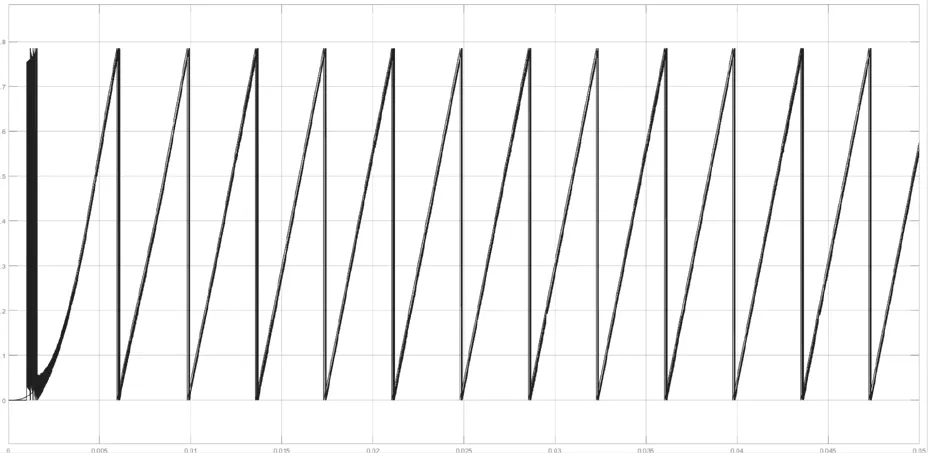
图4 估计转子位置与实际转子位置
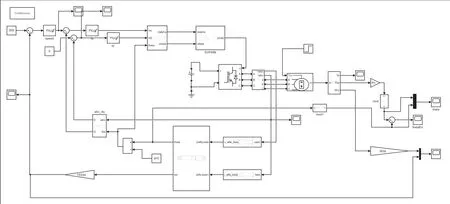
图5 仿真模型控制框图
观察图3可以发现电机在较短的时间内速度就收敛到了设定值,观察图4可知估计转子位置可以很好地跟上实际转子位置,具有较小的误差。实验结果表明,通过滑模观测器和反正切的方式,能够很好地提取电机的转子位置及转速信息,并对电机进行控制。
5.2 结论
本课题是基于Matlab/Simulink平台构建了滑模观测器与反正切下无刷直流电机控制系统。分析了滑模观测器的特点、控制律设计、滑模增益的确立及配合反正切的应用。实验结果表明滑模观测器能很好地响应跟踪上转子位置及转速信息,电机转速能很快收敛到设定值,证实了策略的可行性,实现无刷直流电机的无位置传感器控制,为之后的实物实验验证了理论的可行性。