一种无线充电系统研究
2022-11-30魏良才
尹 华 魏良才 聂 斐 胡 涛 王 林
(1.江苏农林职业技术学院,江苏 句容 212400;2.南京德利联信息科技有限公司,江苏 南京 210000)
0 引言
磁耦合共振技术是一种以电磁场为媒介,利用具有相同谐振频率的电磁谐振系统,通过磁耦合谐振作用实现电能无线传输的技术[1-2]。经过不断研究,该技术已经初步应用于以电池为动力的电动车、小型电动农业机械和便携式设备。
一般来说,在实际充电过程中,锂电池的等效电阻会产生动态变化,为了满足锂电池的充电特性要求,必须要采用恒流充电的方式[3]。文献[4]提出使用副边阻抗调节电路来维持充电电压恒定,然而未对锂电池等效电阻变化对系统带来的影响进行深入研究。此外,副边增加阻抗调节电路会直接影响接收端的小型化和紧凑化设计。
针对上述问题,该文提出基于原边Buck变换器控制的无线充电系统,旨在实现锂电池的高效且恒流充电功能。首先,通过互感模型分析充电电流和传输效率。其次,优化设计无线充电系统的磁耦合机构。再次,分析控制原边Buck变换器的PI算法,并采用Simulink仿真来验证该算法的合理性。最后,通过搭建的实验平台验证该文设计的系统能够实现锂电池的高效且恒流无线充电功能。
1 无线充电系统结构
该文所提出的无线充电系统的结构框如图1所示,原边部分包括72 V直流适配器、Buck变换器和电压型全桥逆变电路,骨架型磁芯和原副边线圈组成磁耦合机构,补偿拓扑为串联-串联型,其优势在于副边反馈到原边的阻抗与磁耦合机构的互感值以及负载变化无关。此外,原边采用串联补偿满足电压型全桥逆变电路的特性要求,副边采用串联补偿,当原边工作于恒压源模式时,副边恒流源特性适合于锂电池充电。副边部分包括85 kHz整流滤波电路、锂电池以及电流传感器。原边与副边之间的无线通信采用串口Wi-Fi模块。
恒流充电的实现方式如下:副边电流传感器采集充电电流,通过Wi-Fi模块将充电电流信息传送到原边控制器,由PI算法控制Buck变换器的占空比调节全桥逆变的输入电压,从而实现充电电流恒定的目标。
2 无线充电系统工作原理
2.1 系统电路模型分析
无线充电系统的等效电路模型如图2所示,主要包括发射装置和接收装置,2个部分之间采用Wi-Fi进行信息交互。
根据基尔霍夫电压定律和图2中电路模型可得公式(1)。
式中:ω为系统工作角频率;L1和L2为发射和接收线圈的自感值;R1和R2为发射和接收线圈的内阻值;C1和C2为发射和接收线圈的补偿电容值;I1和I2为发射和接收线圈的谐振电流;M为发射和接收线圈之间互感值;Us为逆变器等效输出电压;Re为整流桥等效输入电阻。
对磁耦合共振无线充电系统来说,原副边线圈与串联补偿实现谐振,由公式(1)可以得到公式(2)。
式中:Re为副边整流桥的等效输入电阻。对副边采用电容滤波的整流电路来说,Re与RL之间的关系如公式(3)所示。
式中:RL为等效负载电阻。
对全桥逆变的输出电压Us进行傅里叶级数展开,根据基本分量分析法可以得到公式(4)[6]。
式中:Ubus为直流母线电压。
由公式(2)~公式(4)可以得到充电电流Io,如公式(5)所示。
式中:Io为充电电流。
由公式(4)可知,当无线充电系统参数(互感值M,原副边线圈的自感值、内阻,系统工作频率、系统输入电压Uin)确定时,保持Ubus不变,Io随着RL增大而逐渐降低;保持RL不变,Io会随着Ubus的升高而升高,仿真结果如图3所示。由图3可知,通过调节Ubus能够对Io进行控制。一般来说,在锂电池恒流充电的过程中,随着充电电压Uo升高,RL也升高。因此,该文提出通过控制原边Buck变换器的占空比D调节Ubus,从而实现锂电池恒流充电的目标。
2.2 基于PI控制的Buck变换器
2.2.1 原边Buck变换器分析
Buck变换器的电路模型如图4所示,其作用在于通过调节占空比D就可以对Ubus进行调节,从而调整无线充电系统的传输功率。当Buck变换器在CCM模式(电流连续模式)工作时,其输入电压Uin与输出电压Ubus的关系如公式(6)所示。
式中:Uin为接收端Buck变换器的输入电压。
由公式(5)和公式(6)可以得到充电电流Io,如公式(7)所示。
式中:D为接收端Buck变换器的占空比。
当无线充电系统参数(互感值M,原副边线圈的自感值、内阻,系统工作频率,系统输入电压Uin)确定时,由公式(7)和图3可知,RL的变化直接影响Io。因此,该文提出利用PI算法来实时调节Buck变换器的占空比D,就可以实现充电电流Io恒定的目标。
2.2.2 PI控制器设计方法
PI控制器的原理框图如图5所示,其工作原理如下:由电流传感器采集Io,经副边AD转换器、信号调理电路,数字量由Wi-Fi模块发送至原边PI控制器,与预设电流Iset比较。当Io>Iset时,降低Buck变换器的占空比D;当Io<Iset时,提高Buck变换器占空比D,以保证充电电流Io恒定。
因为PI控制器的参数整定决定了控制系统的稳定性,所以有必要对参数整定方法进行研究。常用Ziegler-Nichols法来进行参数整定,步骤如下:1)关闭积分控制器I、微分控制器D作用,单独用比例控制器P,增加P值,使系统出现震荡。2)降低P值,找到临界震荡点。3)加大I作用,使系统达到设定值。4)重新上电,观察超调、震荡以及稳定时间是否符合系统要求。5)针对超调和震荡的情况,适当增加微分项。最终,可以确定公式(8)中的Kp和Ki。
式中:Kp和Ki分别为比例系数和积分系数;G为增益;S为复频域算子。
3 系统仿真分析
基于上述分析,采用磁场与电路仿真进一步验证理论分析的合理性。首先,优化磁耦合机构给出适于该文所提出的无线充电系统的磁耦合机构参数。其次,采用Simulink仿真恒流充电验证基于PI算法控制的原边Buck变换器调节充电电流的可行性。
3.1 磁耦合机构优化设计
采用Ansoft Maxwell软件对磁耦合机构进行仿真,通过参数扫描方法对线圈参数(L1、L2和M)进行优化设计。在Ansoft Maxwell仿真软件中构建的磁耦合机构侧视图和斜视图,如图6(a)所示。其中,发射端由铁氧体磁芯和发射线圈构成,接收端仅包括接收线圈。磁耦合机构空间磁场分布情况如图6(b)所示,磁场主要集中在发射端和接收端中间位置,从而实现高效传输能量的目标。
当系统频率为85 kHz时,结合图6(a)中的磁耦合机构,表1给出了磁耦合机构的参数仿真结果,并且此时原边和副边线圈的匝数分别为18和20。

表1 磁耦合机构参数的仿真结果
3.2 恒流充电的闭环仿真
为验证该文所提出的恒流充电控制策略的合理性,采用Simulink软件进行闭环仿真,结果如图7所示。
当锂电池电压随着充电时间逐渐升高时,通过PI算法控制原边Buck变换器占空比D,实现5 A恒流充电的目标。随着电池电压的升高,需要逐渐提高占空比D,以维持充电电流恒定。此外,当垂直距离发生变化时,互感值也会改变,相应的闭环仿真结果如图7(b)所示。与相同的充电电压对应,当互感值变小(垂直传输距离变长)时,Ubus也会降低。
4 系统试验验证
4.1 试验装置
系统试验装置原边部分主要包括72 V直流适配器、Buck变换器、全桥逆变电路、发射线圈以及串联补偿电容;副边主要包括接收线圈、串联补偿电容、整流滤波电路以及锂电池。该文采用的电流传感器型号为致同公司的HCS-ES5-10A,原边控制器型号为ST公司的STM32F103。此外,该文设计的试验系统参数见表2。
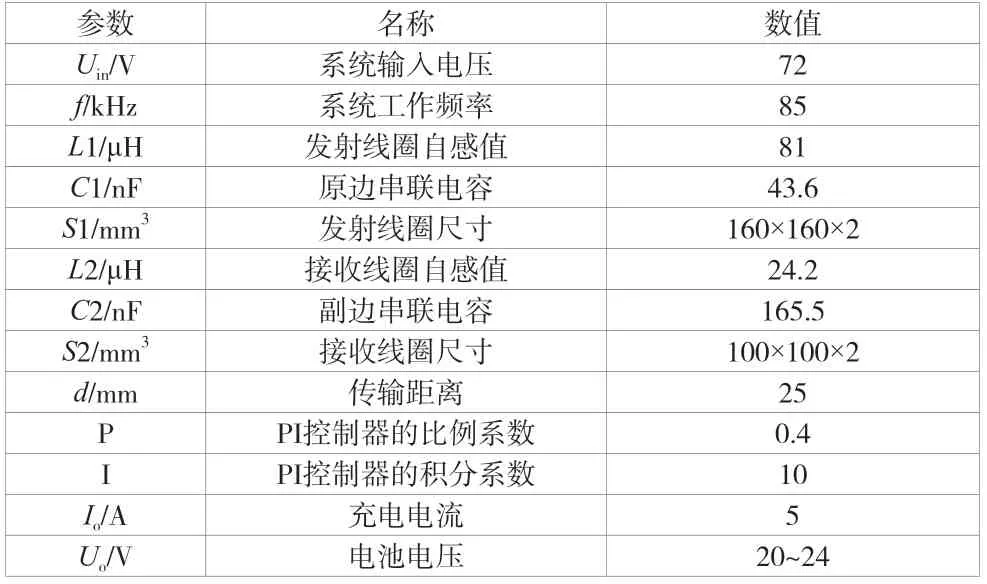
表2 试验系统参数
4.2 试验验证
恒流充电的试验波形如图8所示。当锂电池电压发生变化时,充电电流维持在5 A。试验结果验证了上述理论分析与软件仿真结果。
当传输距离为25 mm(M=11 μH)和40 mm(M=9 μH)时,恒流充电时不同充电电压与Buck变换器占空比D的关系如图9所示。由图9可知,当充电电压Uo升高时,占空比D随之增加,以确保充电电流恒定。
5 结语
该文设计了一套无线充电系统,通过建立系统数学模型,分析充电电流与锂电池等效负载电阻的关系。采用原边PI算法调节Buck电路占空比,实现锂电池恒流充电的目标。同时,采用Ansoft Maxwell软件优化设计磁耦合机构,采用Simulink软件对恒流充电进行闭环仿真分析,验证理论分析的可行性。最后,通过搭建实验平台验证仿真结果的合理性,实现传输距离为25 mm时5 A恒流充电的目标。
