国产激光跟踪仪在工业机器人校准中的应用
2022-11-30周培松周维虎董登峰敖俊姣梅东滨
周培松 周维虎 董登峰 敖俊姣 梅东滨
(1.海宁集成电路与先进制造研究院,浙江 嘉兴 314400;2.中国科学院微电子研究所,北京 100029)
激光跟踪仪是一种大尺寸、空间几何量精密的测量仪器,具有量程大、测量精度高、测量速度快、测量功能多(三维坐标、尺寸、形状、位置、姿态和动态运动参数等)以及可现场测量等特点,是大型高端装备制造与机器人位姿校准中不可或缺的检测仪器。
工业机器人是一种集精密化、柔性化和智能化于一体的多自由度自动机器装置,可以根据自身的动力和控制能力完成各种工业加工制造任务,在高端制造、无人工厂以及现代物流等各个工业领域中都有广泛应用。工业机器人,尤其是高精度工业机器人的研发、制造和应用代表一个国家高端制造业水平和科技创新能力。
1 工业机器人校准的必要性
“中国制造”举世闻名,工业机器人在“Made in China”中发挥了不可替代的作用。工业机器人的主要性能指标如图1所示,其中有2个最重要的性能指标:位姿重复性和位姿准确度[1]。位姿重复性即重复定位精度,是指工业机器人重复回到同一位姿的能力,由工业机器人本身的硬件质量(例如编码器、齿轮系的精度等)保证。位姿准确度是工业机器人到达指令位姿的能力,也即绝对定位精度。绝对定位精度在实际工况下取决于关节的实际结构尺寸与机器人控制系统所用的模型尺寸间的差异、运动控制分辨率、坐标转换误差以及工业机器人零部件的加工误差等因素。提高工业机器人绝对定位精度的关键在于建立合适的误差模型并实时补偿[2]。
工业机器人实现高精度、稳定正常作业的前提条件是高绝对定位精度,它直接关系到企业的良品率、生产效率。以往大部分工业机器人都是采用激光测距仪、千分尺、三坐标测量机或者进口的激光跟踪仪对性能指标进行校准或检测,但是受检测方法(位置、姿态性能指标及位置稳定性等参数难以实现动态测量)或进口激光跟踪仪价格昂贵等因素的限制,不能满足企业对工业机器人高精度控制及低成本的要求。
随着工业机器人应用越来越广泛和国际竞争的加剧,自主掌握工业机器人的校准技术变得越来越迫切。该文在国家重点研发计划“智能机器人”专项的支持下开展国产激光跟踪仪用于工业机器人校准的研究及应用工作。
2 国产激光跟踪仪介绍
国产激光跟踪仪是基于球坐标系进行测量的,可对大型构件尺寸及形位误差进行静态测量,也可以对运动部件进行动态跟踪测量。
当激光跟踪仪工作时,由激光测距系统测量得到合作靶球到仪器的精确距离r,方位编码器测角系统测出目标方位角A,俯仰编码器测角系统测出俯仰角E,根据这3个原始测量值以及球坐标系与直角坐标系之间的转换关系换算得到空间三维坐标(X,Y,Z),如图2所示。
当合作靶球在空间移动时,从靶球返回的一部分光会进入激光跟踪仪主机内的位置检测器(Position Sensitive Detector,PSD),PSD会根据靶球的移动探测偏移值,跟踪控制系统根据这个偏移值控制方位和俯仰电机转动,直到偏移值为0,从而实现跟踪的目标。
激光跟踪测量的数据处理过程如下:首先,对测量组合参数(A,E,r) 进行坐标变换,获得空间三维直角坐标(X,Y,Z)。其次,数据采集系统将测量数据上传至上位机,经上位机软件解析可以确定目标的三维坐标及动态轨迹等信息。最后,通过计算机实时显示,还可以根据需要进行数据拟合及建立模型。
由中国科学院微电子研究所和海宁集成电路与先进制造研究院合作研制的三自由度激光跟踪仪(型号为ICAM-LT-3DOF)和六自由度激光跟踪仪(型号为ICAMLT-6DOF)突破了国外的技术垄断。其中,ICAM-LT-3DOF的主要技术指标见表1。
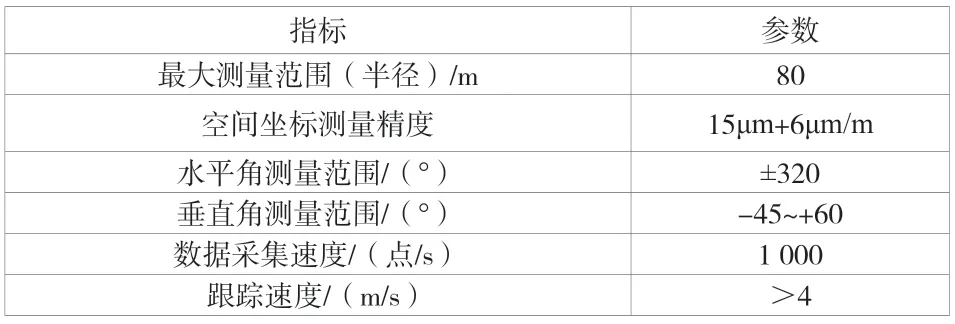
表1 ICAM-LT-3DOF型激光跟踪仪主要技术指标
六自由度激光跟踪仪为三自由激光跟踪仪的升级产品,ICAM-LT-6DOF六自由度激光跟踪仪产品如图3所示。
六自由度激光跟踪仪在空间位置信息测量的基础上加入了视觉测量、光电测量和惯性测量等模块,可以获取目标空间姿态信息。首先,建立激光跟踪仪坐标系与上述测量模块坐标系之间的转换关系,并通过视觉测量中纵向投影比不变的约束测量横滚角。其次,在上述基础上,基于光束向量唯一性约束和激光准直传感原理测量俯仰角和方位角。最后,测量3个空间姿态角。除此之外,还融入了惯性测量单元IMU的测量信息,用于动态条件下的辅助测量。ICAM-LT-6DOF型激光跟踪仪的主要技术指标见表2。

表2 ICAM-LT-6DOF型激光跟踪仪主要技术指标
3 国产激光跟踪仪对工业机器人进行校准和检测的方案
3.1 建立“手眼关系”
激光跟踪测量系统与工业机器人两者的有机结合就是给工业机器人装上了“眼睛”。通过设计六自由度姿态测量靶标精确建立工业机器人末端坐标系与激光跟踪仪坐标系形成的“手眼关系”,再用激光跟踪仪直接测量,有效地解决了转换精度受机器人运动学误差影响的问题。工业机器人基于自身的坐标系控制运动,而激光跟踪仪根据自己的坐标系获取位姿信息,如果要机器人准确识别激光跟踪仪发送来的位姿信息,就需要统一激光跟踪仪坐标系和工业机器人坐标系。根据工业机器人正向运动学模型和激光跟踪仪的直接测量,利用基于奇异值分解的配准方法求解转换矩阵,高精度地建立工业机器人基坐标系。
3.2 工业机器人位姿误差建模
工业机器人的实际应用场景复杂多样,影响控制系统产生偏差的因素很多,实际工况下工业机器人的控制精度必定会降低。参数误差和非线性残差是工业机器人的控制误差的主要误差来源,见表3和表4。

表3 工业机器人参数误差

表4 工业机器人非线性残差
工业机器人运动模型通过4个参数(ai,αi,di+1和θi+1)来确定相邻关节坐标系间的齐次变换矩阵(图4),由此确定机器人相邻关节坐标系间的转换关系并对机器人进行位姿误差补偿。
工业机器人位姿误差建模的具体过程如下:首先,建立合适的模型,把影响工业机器人精度的主要因素融入工业机器人的运动学模型中。其次,比较理论位姿与测量出的工业机器人末端实际位姿,得到工业机器人的位姿误差。最后,通过辨识的方法获得影响工业机器人精度的参数,再通过软件的形式进行补偿[3-5],如图5所示。
3.3 工业机器人校准与检测流程
工业机器人校准与检测方案主要包括ICAM-LT-6DOF激光跟踪仪主机、六自由度靶标测头、电控箱、精度校准以及性能检测上位机软件等部分。
六自由度靶标安装于工业机器人末端,如图6所示。其中,国产激光跟踪仪通过六自由度姿态测量靶标完成工业机器人末端位置和姿态的精密测量工作;上位机软件负责获取激光跟踪仪测量数据、创建工业机器人模型、校准工业机器人模型以及生成校准结果和检测报告;电控箱负责同步软件、工业机器人以及激光跟踪仪,确保可以有序、自动地完成整个过程[6]。
工业机器人以六自由度为主,在理论上有f(a1,…,a6,d1,…,d6,α1,…,α6,θ1,…,θ6)=(x,y,z,α,β,γ),工业机器人与激光跟踪仪“手眼关系”的标定包括以下步骤:1) 步骤一。将工业机器人和激光跟踪仪系统视作一个新机器人系统,在新机器人末端安装六自由度姿态测量靶标,结合D-H参数模型,将激光跟踪仪坐标系作为新机器人末端坐标系。2) 步骤二。多次移动新机器人末端,获取多组的新机器人轴转角(θ1,...,θi)与新机器人末端位姿(x,y,z,α,β,γ)之间的对应关系以及海量原始位姿数据。3) 步骤三。根据新机器人末端位姿与新机器人结构参数关系,求解新机器人末端多次移动时,新机器人末端位姿的变化量,通过最小二乘法优化新机器人结构参数,并完成在线的补偿工作,具体流程如图7所示。
4 现场应用案例
在实验室研究的基础上,在实际工况条件下应用国产激光跟踪仪工业机器人校准系统。
4.1 某公司工业机器人用于晶圆精密抓取校准
根据全尺寸晶圆精密抓取转运机器人高精度校准需求,适配相应的参数,实现机器末端高精度空间位置测量的功能;研究先进机器人动力学参数辨识方法,并在该基础上研究使其校准误差/误差带最小的最优校准轨迹生成方法[7]。该应用解决了工业机器人末端实时坐标的测量问题[8],为工业机器人实现全尺寸晶圆精密抓取提供了保障。
4.2 某公司工业机器人用于磨削、航天钻孔及铣削等场景校准
针对工业机器人磨削、航天钻孔及铣削等场景的高精度使用需求[9](图8),通过实时测量模块实现国产激光跟踪仪与自主开发的在线校准系统软件实时通信的目标,并与工业机器人进行了联调,可以对工业机器人位姿进行实时测量和反馈。
4.3 某研究单位工业机器人动态轨迹测量
针对工业机器人动态轨迹实时测量的需求,将六自由度姿态测量靶标安装在工业机器人末端,实现了国产激光跟踪仪对工业机器人进行动态轨迹测量的功能[10]。国产激光跟踪仪可以有效地对工业机器人的运动姿态进行在线监控,为工程应用提供了高效便捷的手段。
5 结语
国产激光跟踪仪用于工业机器人校准及性能测试已经过充分的验证,取得了很好的使用效果。国产激光跟踪仪实时采集工业机器人的位姿数据,然后根据运动模型推算需要补偿的参数,形成闭环的反馈控制,提高工业机器人的控制精度,指导工业机器人高精度作业。国产激光跟踪仪校准工业机器人技术的推广将推进自动化行业的进步,对我国高端制造业的发展有显著的促进作用。
