基于深度学习的战场伤员穿透聚焦成像研究
2022-11-29柏明浩张园园赵文彬梁福来
柏明浩,张园园,赵文彬,张 杨,吕 昊,安 强,梁福来
(空军军医大学:1基础医学院学员四大队,4军事生物医学工程学系医学电子学教研室,5陕西省生物电磁监测与智能感知重点实验室,陕西 西安 710032;2解放军95966部队,黑龙江 哈尔滨 150060,3军事科学院军事医学研究院科研保障中心信息保障室,北京 100850)
生物雷达利用低频段电磁波对墙体等障碍物有穿透能力,也可捕捉生物目标呼吸、心跳等体表微动,并以此为依据定位和辨识生物目标[1]。生物雷达具备对战场环境下伤员目标及周围战场环境态势的动态感知能力,对战场伤员的快速搜救具有重要的应用价值。目前已研制出一维单通道测距型穿透雷达、二维多通道定位型/成像型穿透雷达和三维多通道成像型穿透雷达[2-3]。生物雷达技术方面的研究集中在人体目标的聚焦成像、检测与定位算法、多径杂波抑制算法、墙体穿透补偿、建筑布局重建等方向。其发展趋势从单一的人员探测与定位逐步向雷达成像及战场态势的综合感知方向转变。然而,由于战场环境的特殊性,生物雷达的成像性能遇到了很大的挑战。一是战场伤员的生命体征信号微弱,易受杂波和噪声的干扰,导致目标图像模糊不清,难以精确分辨多个遮蔽目标;二是战场环境中穿透介质的复杂程度高,难以准确获得实际传播路径且传播时间延迟,导致目标图像产生明显散焦和偏移;三是生物雷达系统稀疏阵列导致的栅瓣、旁瓣干扰等也会引起一定程度散焦。上述特殊性导致伤员目标图像的信杂噪比较差,伤员目标定位、识别和提取在战场环境应用中变得更为困难[4]。
深度学习是目前机器学习研究中的最新技术,其通过构建深层非线性网络结构并利用计算机的快速计算能力来模拟人脑对复杂数据问题分析处理的过程,具有从无标签数据样本集中学习数据样本集本质特征的特点,减少了手动设置标签的工作量。由于模型的层次有足够的深度、对数据集表征能力强,与其他机器学习技术相比,深度学习具备表达出大规模数据的数据特征的能力。特别是对于图像这类特征标签不明显的问题,深度学习技术能够较快地分析处理大规模图像数据并获得较好的结果[5-6]。
为解决生物雷达成像技术在战场伤员搜救等应用场景中存在目标散焦和信杂噪比低等问题,利用具有强大图像映射生成能力的深度学习网络,将战场伤员目标成像过程看作原始散焦模糊图像到期望聚焦高分辨图像的映射过程,充分提取模糊图像中介质穿透所引起的散焦的特征,补偿介质对成像的影响,实现对战场伤员雷达图像聚焦成像,提高目标信号的信杂噪比,提升伤员搜救性能。
1 材料与方法
1.1 材料
利用MATLAB软件得到多输入多输出系统(multiple-input multiple-output,MIMO)生物雷达回波数据,通过2D真实磁共振成像(magnetic resonance imaging,MRI)切片模拟人的胸部。根据虚拟人的数据库,胸腔内的器官被设置为不同的介电常数值。呼吸时胸壁沿视线的最大位移约为4 mm。在两个完整的呼吸周期内对45个MRI切片进行采样,可以获得每个MRI切片的MIMO生物雷达回波,模拟微动生命体征的回波,并将在实际获取的废墟图像中利用边缘提取技术生成废墟结构。
1.2 方法
1.2.1 废墟压埋人体目标的正演仿真 MIMO生物雷达回波采用时域有限差分法仿真计算。回波仿真参数设计方法:MIMO生物雷达天线阵列由2个位于阵列中心的发射阵元和15个接收阵元组成,发射信号为宽度为5 ns的脉冲波形,将MIMO生物雷达天线阵列的中心设置为坐标系的原点。在距离天线阵1.1 m处布置一定厚度的均匀墙体,其介电常数(ε)为3.5,并在原始数据中添加一定信噪比的高斯白噪声。仿真场景:在城市巷战中,战斗人员在受伤后,常以建筑物为掩体或者被建筑物掩埋。根据城市巷战的战场环境特点,通过改变介质厚度、目标数量、仿真场景等参数,模拟真实战场的场景,并构建典型战场环境伤员电磁仿真模型。如图1所示,对以下四类常见的场景进行仿真。

A:自由空间单个伤员目标;B:0.3 m厚墙后多伤员目标;C:1.0 m厚墙后单个伤员目标;D:模拟废墟后单个伤员目标。
1.2.2 伤员目标MIMO雷达成像及预处理 对伤员目标MIMO雷达成像使用向后投影(back projection,BP)成像算法和自聚焦成像算法。在生物雷达应用中,BP成像算法参考了“时延-叠加”的思想,首先计算出生物雷达成像空间内每个像素点到收、发天线阵元之间的时延并得到相应的积累轨迹,再将所有像素点的积累轨迹在回波域内进行叠加,最终得到该像素点在生物雷达图像中对应的像素值。相对于战场复杂环境中的杂波干扰而言,伤员目标生命体征微动信号幅值较小,信杂噪比较低,影响对伤员目标的精确定位。因此,对成像结果进行微动生理信号积累增强[7]。使用BP成像算法得到的结果,如图2所示,可见受介质穿透效应的影响,生命微动信号的成像结果出现了严重的散焦现象,基于图像无法判断生命体的有无和精确定位。
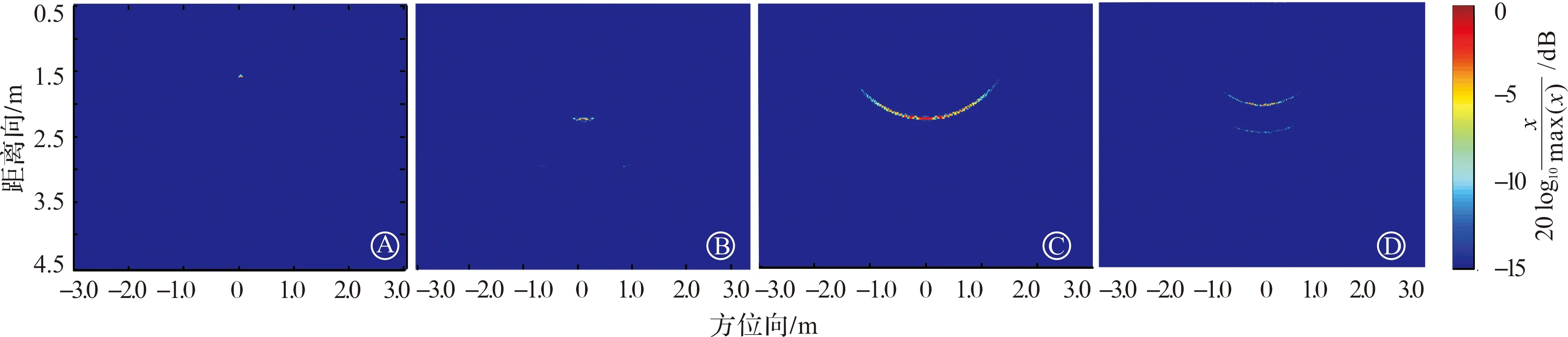
A:自由空间单个伤员目标;B:0.3 m厚墙后多伤员目标;C:1.0 m厚墙后单个伤员目标;D:模拟废墟后单个伤员目标。
自聚焦成像算法以特定的生物雷达图像特征(分辨率、信杂噪比等)为评价指标,将介质穿透补偿问题转化为图像成像效果评价问题。其一般处理过程为对回波数据进行生物雷达成像处理,利用生物雷达图像聚焦度评价函数对当前成像结果进行评价,评估当前成像结果的聚焦程度,调整参数再次进行生物雷达成像[2],经过多次迭代后比较图像聚焦度函数得到最优解,此时图像的聚焦度最优。使用自聚焦成像方法得到如图3所示的成像结果,可见经过自聚焦处理后图像的聚焦程度明显改善。
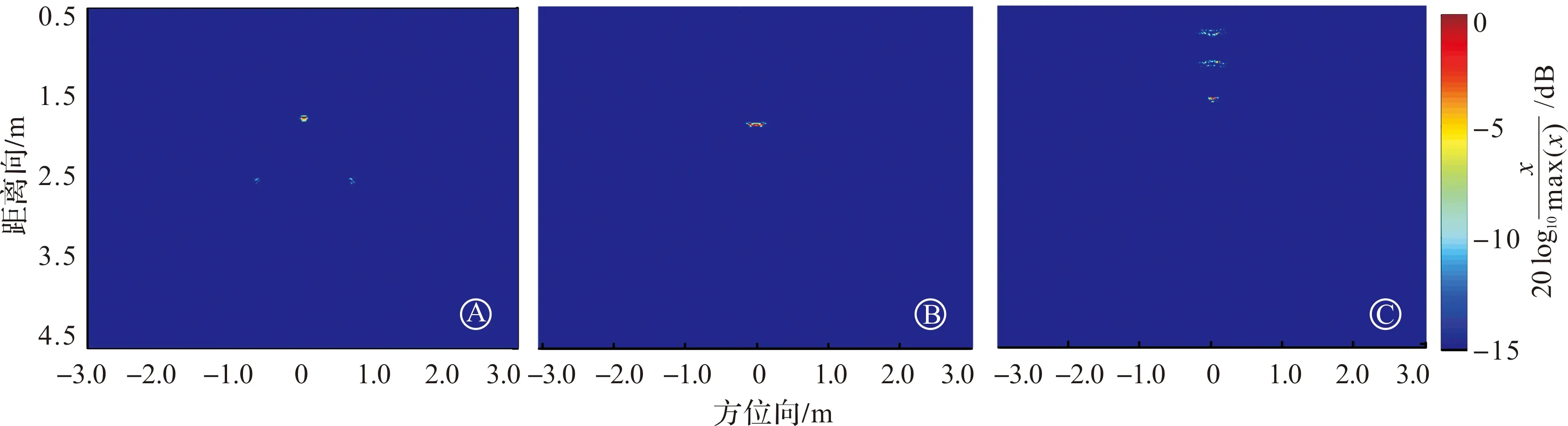
A:0.3 m厚墙后多伤员目标自聚焦成像;B:1.0 m厚墙后单个伤员目标自聚焦成像;C:模拟废墟后单个伤员目标自聚焦成像。
1.2.3 数据准备及预处理 利用上文仿真的典型场景,我们对同一组仿真回波作了BP方法成像和自聚焦方法成像,将自聚焦方法成像结果作为数据集中的真实值数据,将BP方法成像结果作为深度学习网络的输入数据。将输入图像和真实图像的大小设置为256×256像素。同时,因为仿真数据量不足,我们又进行了数据旋转、数据加噪等处理,将数据集扩充到了500个。将模拟废墟场景作为测试集,其余场景下的数据都作为训练集。
1.2.4 模型选择 模型使用生成式对抗网络(generative adversarial network,GAN)模型,其由两个网络组成,即学习训练数据集分布的生成器网络(G)和鉴别数据样本来自训练数据而不是生成器的鉴别器网络(D)[8-10]。如图4所示,首先预定义G,即G在已知噪声变量pz的基础上,学习训练数据集的分布pdata并输出新的数据分布pg。另外,预定义D,即D能够对样本数据作出判断,并输出一个样本数据来自pg或pdata的概率。生成器G和鉴别器D交替训练,得到pg≈pdata。优化G的参数是通过最小化log(1-D(G(z))),即通过优化D(G(z))提高了生成能力(使D无法区分样本是来自pdata或pg)。优化参数D是为了增加判断训练样本和生成样本的正确率,即通过最大化D(x)=1和最小化D(G(z))=0来提高识别能力。调整G使目标函数LGAN(D, G)最小化,调整D使目标函数LGAN(D, G)最大化[5],即:

图4 基于GAN的生物雷达图像优化模型

(1)
在原始GAN中,对生成数据的模式没有控制。可通过附加信息来调节模型,进而指导数据生成过程。一种直观的理解方式是,原始GAN获取图像的相应特征,然后使用噪声作为基础来生成真实的图像。而在本文中,GAN需要以雷达图像为基础生成一幅高分辨的图像。因此,引入含有模糊因素的图像作为可控信息,引导GAN完成模糊补偿。具体的方法是将包含模糊因素的图像作为附加信息y同时引入到G和D中[11]。将上述的目标函数修改为:

(2)
其中,D(x,y)表示D在x和y的输入下的输出,G(z,y)表示G在z和y的输入下的输出。整个训练过程是G和D交替训练的迭代动态过程。首先,参数G是固定的,通过将G的输出标记为假,原始图像标记为真,训练D尽可能多地区分G的输出和原始图像。然后,固定参数D来训练G。优化G参数是为了使D出错的概率最大化。上式中的目标函数表示为:
LL1(G)=Ex,y,z[‖y-G(x,z)‖1]
(3)
因此,结合L1和GAN的目标函数为:
(4)
其中,λ限制输出和真实图像之间的差异,使生成器G的输出图像在不偏离图像真实性的前提下,具有更高的分辨率。
1.2.5 模型建立 原始GAN的生成器主要采用将向量映射到图像的编码器-解码器结构[5]。然而,在雷达图像处理领域中,图像的输入和输出之间存在一些共享信息,仍采用前述结构容易损失目标图像的边缘和位置信息。为了解决信息共享问题,在G中采用了跳跃连接方式,使部分信息绕过中间层,这种结构称为U-net网络[6]。具体方法是将Ⅰ层与n-Ⅰ+1层相连,其对细节信息的提升效果非常明显,在生物雷达成像应用方面,可用来保留高分辨率下的细节信息。
为了迫使D更加关注生物雷达图像的像素及细节信息,一种方法是关注图像的局部性,缩小感受野,这种类型的D称为Patch-GAN鉴别器[12],其结构如图5所示[8]。让D对整个图像进行卷积,得到矩阵输出值作为结果,用矩阵输出值来鉴别每个N×N图像块是真还是假。该方法能够更好地表征生物雷达图像细节信息,有利于生成高分辨率的生物雷达图像。
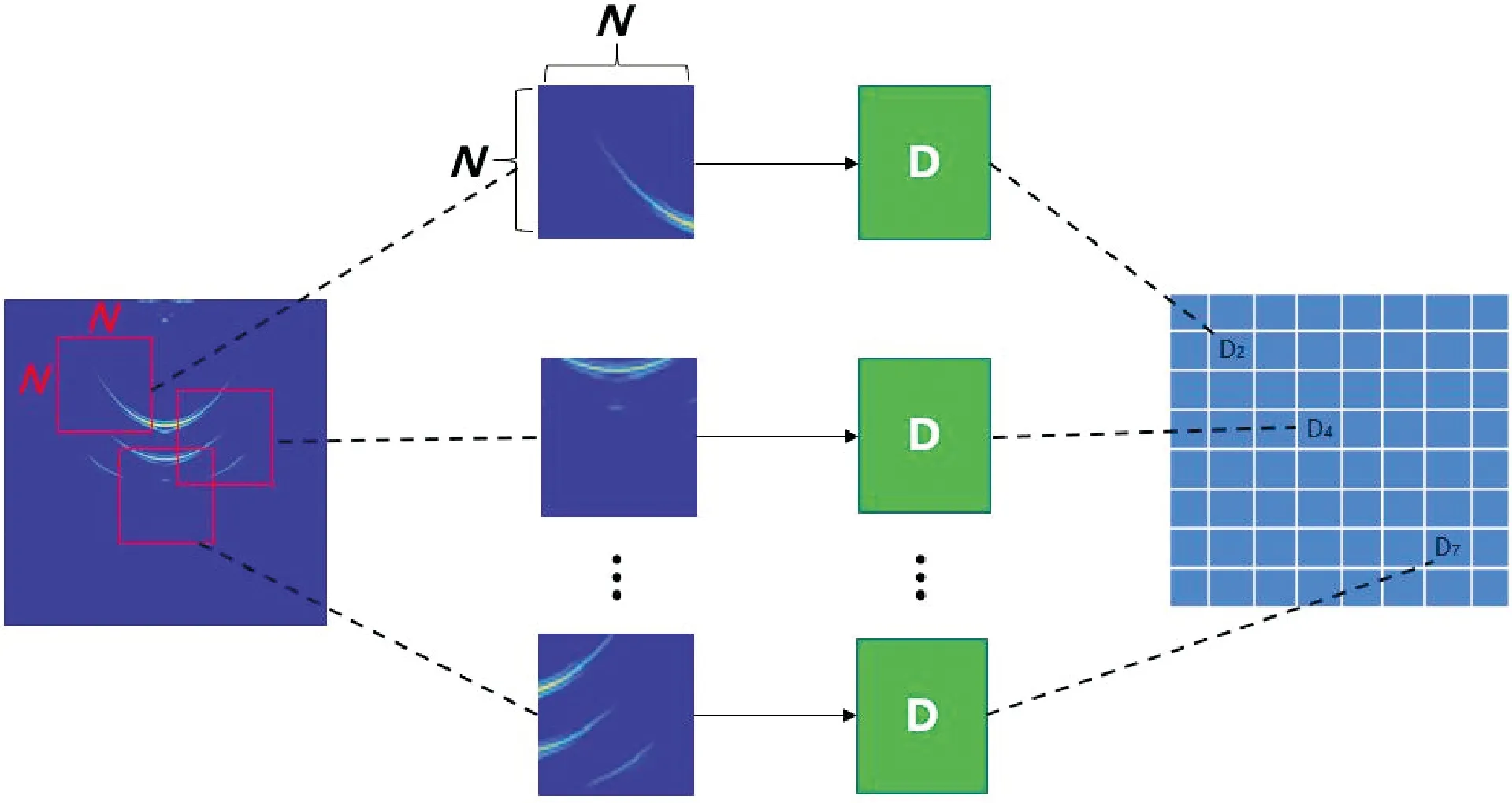
图5 鉴别器结构
根据上述描述,G采用U-net网络,D采用感受野为70×70的Patch-GAN鉴别器。为了简化起见,CBRk用于表示具有k个滤波器的卷积层,CBDRk表示具有k个滤波器并且采用斜率为0.5的ReLU函数的卷积层。所有卷积层采用4×4的滤波器,步长为2。其中,Leaky-ReLU的斜率是0.2。生成器和鉴别器的详细结构在本文中应用如下[8]。
①生成器详细构架
编码器:CBR64-CBR128-CBR256-CBR512-CBR512-CBR512-CBR512-CBR512
解码器:CBR512-CBDR1024-CBDR1024-CBR1024-CBR1024-CBR512-CBR256-CBR128-CBR3(tanh)
②鉴别器详细架构
Patch-GAN鉴别器:CBR64-CBR128-CBR256-CBR512(步长:1)-CBR1(步长:1,sigmoid)
其中,tanh和sigmoid表示在该层中使用tanh或sigmoid激活函数。
1.2.6 模型训练 在GAN的训练过程中,批次大小设置为1,采用微批次随机梯度下降和Adam优化器,学习率设置为0.000 2,动量参数β1=0.5,β2=1.0,每个循环平均需要180 s。此外,等式(4)中的λ设置为100。所有滤波器的权重初始化都选择均值为0、标准偏差为0.02的高斯分布。
2 结果
GAN生成高分辨率雷达图像的过程(图6A),每经过20次迭代,得到生成器所生成的雷达图像(图6B),得到的结果能够准确反演出模拟废墟结构以及人体目标的位置。
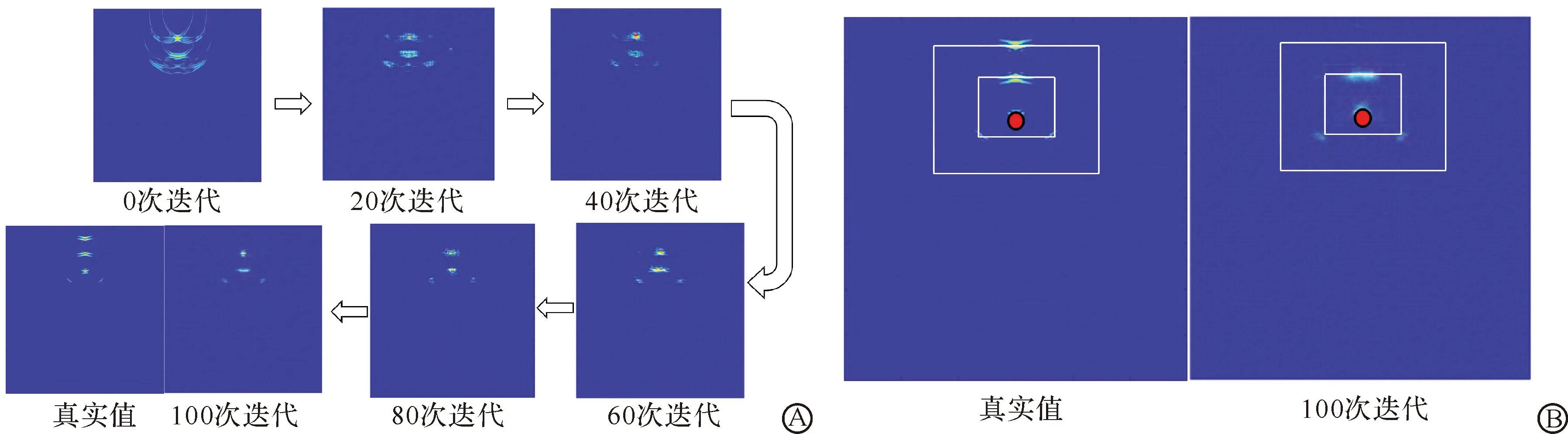
A:GAN生成图像过程;B:基于GAN的聚焦成像结果。
训练损失曲线如图7所示。在生物雷达图像训练过程中,经过60次迭代训练数据集,G能够大致消除介质穿透形成的干扰。
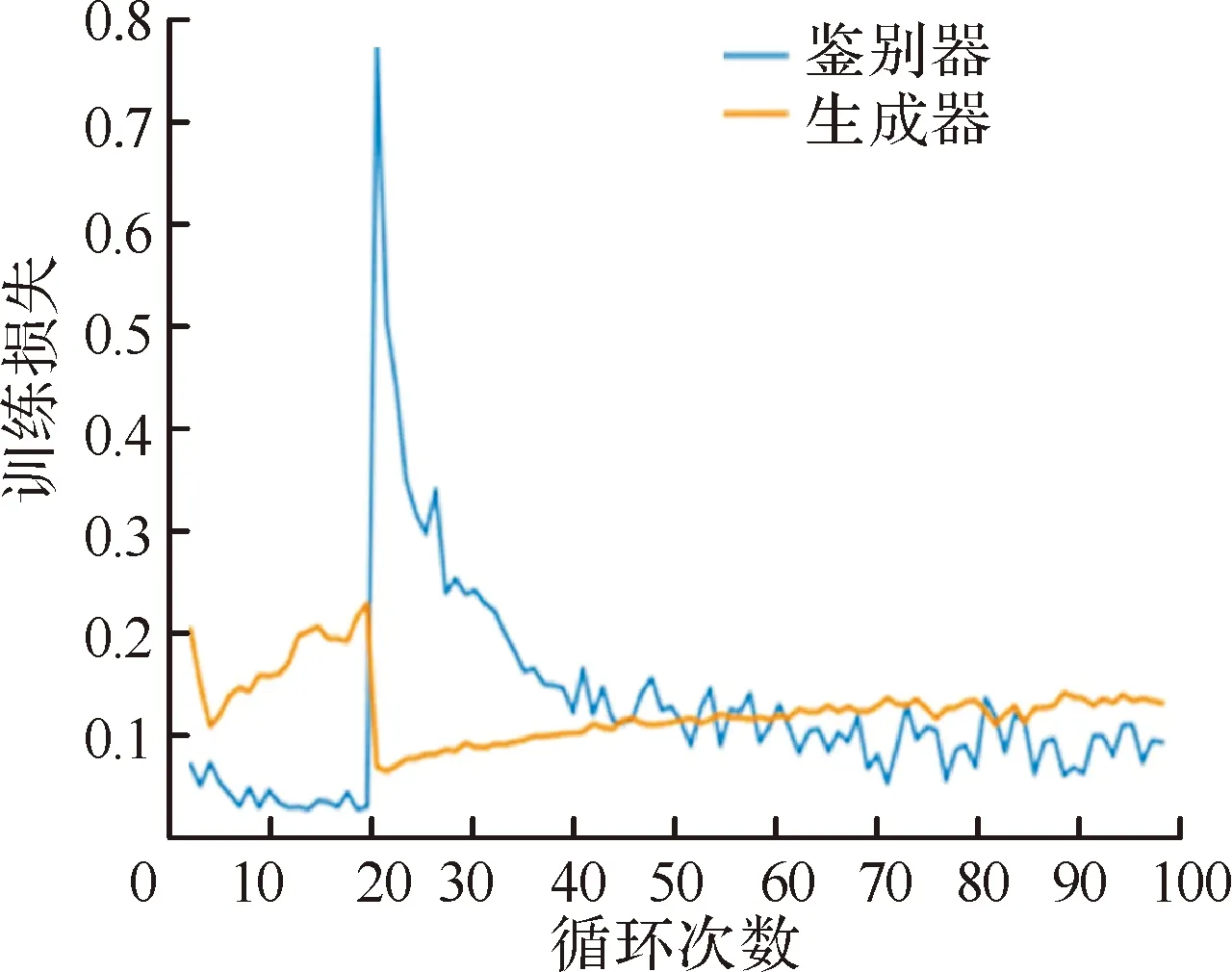
图7 GAN中生成器和鉴别器损失函数
取生命体征信号所在的方位向位置,沿二维图像的距离向进行剖分,分别截取标签图像、输入图像和生成图像的一维距离向剖面进行对比分析。可见,基于GAN的聚焦成像方法能够很好地解决战场复杂环境以及伤员生命体征信号微弱的问题,提高伤员目标图像的信杂噪比,如图8所示。
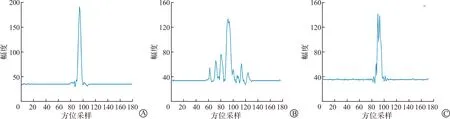
A:真实图像;B:输入图像;C:生成图像。
3 讨论
生物雷达利用低频段电磁波对障碍物的穿透能力,实现对战场环境下伤员目标及周围环境态势的动态感知,在反恐、巷战等战场条件下伤员的快速搜救领域中具有重要的应用价值[13-14]。近年来,深度学习方法在诸多领域取得巨大成功,并且在军事领域中展现出极大的应用潜力[15-17]。本文旨在探索研究基于深度学习的穿透聚焦成像方法,以便在复杂战场环境下,获得高质量的伤员目标生物雷达图像,提升伤员目标的探测、识别性能。围绕上述目的,本文构建模拟废墟场景和伤员目标模型,仿真典型场景下MIMO生物雷达伤员目标回波,利用BP成像算法、自聚焦成像算法对伤员目标回波进行成像处理,并分析比较两类方法的优缺点,为基于深度学习的穿透聚焦成像方法提供了数据集,研究并初步实现了基于深度学习的穿透聚焦成像方法,仿真数据处理结果验证了这一思路的可行性。
但本文工作仍存在以下不足:数据集为仿真数据,缺乏实际复杂场景下的真实数据;GAN的结构和具体参数仍有较大的改进空间,性能也有望进一步改善。后续的研究将从实际复杂场景入手,构建更加符合生物雷达成像的深度学习框架,优化框架的参数配置,进一步完善基于深度学习的穿透聚焦成像。
