基于Adams 的车用滑移门导轨倾角对操作力影响的研究*
2022-11-28马嘉楠苗永存傅爱军张方磊
马嘉楠,苗永存,傅爱军,张方磊,周 云
(1.广西科技大学 机械与汽车工程学院,广西 柳州 545000; 2.柳州五菱汽车工业有限公司,广西 柳州 545000)
0 引 言
不同于传统铰链门的运动形式,汽车滑移门因车门开度更大、开启时占据外部空间更小等优点,被广泛应用于各类MPV 车型中。 在设计汽车滑移门时,不仅要避免车门与车身其他部分出现干涉,还需保证滑移门具备良好的运动平顺性。 平顺性是滑移门感知质量的重要组成部分,直接影响使用者对整车质量的评价[1]。 导轨作为承载滑移门运动的重要部件,其安装布置、几何形状、加工工艺等特征均会影响滑移门系统的平顺性。
近年来,面向滑移门的设计研究与仿真分析也在逐步完善。 刘鹏飞运用正交实验设计方法研究了滑移门主要结构件的制造偏差对滑移门平顺性的影响,得到了各因素对结果的不同影响[2]。 Hyung 等人分析了滑移门各部件的布置参数对滑移门操作力的影响,研究了中轨道弯曲角度的变化对滑移门操作力的影响[3]。 Muneer 等人结合试验研究了影响滑移门关门速度的相关参数,提出气压阻力是影响滑移门最小关闭速度的重要因素[4]。
笔者以某MPV 车型滑移门为例,针对导轨的不同姿态进行运动学仿真,总结和分析了导轨倾角对滑移门操作力的影响,对滑移门机构的设计具有一定的指导意义。
1 滑移门多体动力学模型的建立
1.1 滑移门系统基本结构
汽车滑移门系统的主要部件包括门板、走轮臂、滚轮、导轨、锁体、限位器、缓冲装置和内外把手等[5]。 汽车滑移门主要依靠位于上部、中部、下部的三个走轮臂,走轮臂铰接数个滚轮,且滚轮分别固定在导轨凹槽中,以此实现滑移门与车身的连接,滚轮沿导轨滚动时完成滑移门的开启与关闭。 在滑移门系统中,除满足强度和基本功能的门体、缓冲件和把手等部件外,走轮臂、滚轮和导轨也是影响滑移门运动的关键部件,文中主要研究导轨倾斜角度对滑移门运动平顺性的影响。
上导轨主要起导向作用,故上导轨无承重平面且与之相配合的滚轮均为导向轮,即不承受车门重力;中导轨和下导轨起导向和承重作用,与导轨配合的滚轮中既有导向轮也有起垂直支撑作用的承重轮。 于此同时,三条导轨的弯曲程度也不尽相同,其中中导轨的弯曲程度较大。
1.2 设置约束
由于滑移门系统零部件较多,且大多部件如门的内板、外板、锁体、限位器等并不参与仿真运算,为简化模型首先将这些相对静止的部件进行布尔加运算,将其合并为一个整体。 随后在建立多体动力学模型时,可根据滑移门各个部件之间实际存在的约束关系,在Adams 中设置不同的运动副,以减少部件之间的自由度。 使用固定副、旋转副和接触约束等即可体现各部件间的约束关系。 主要部件的约束关系是:导轨使用固定副约束其全部自由度、铰链走轮臂使用旋转副、滚轮在轮销处采用旋转副约束、滚轮与导轨为接触副。
ADAMS 中提供2 种算法计算约束关系,分别为罚函数法(Restitution)和冲击函数法(Impact)。 罚函数法根据损失系数和恢复系数计算接触力,损失系数限于单向约束,并控制接触时的能量耗散。 该算法对接触过程的持续时间非常敏感,故更适合于冲击过程的仿真,但对于包含大量接触事件的仿真得到的结果往往与实际有较大偏差[6]。 因此文中选择基于冲击函数的算法(Impact-Function-Based contact)计算滚轮与导轨间的接触力,其接触力的公式如下:

式中:x为物体之间的距离;为物体间的相对速度;x1为x的自由距离,当x小于x1时表示物体间发生接触并产生压力,x大于等于x1时则代表物体间尚未发生接触;k为材料刚度;e为压力指数;cmax为最大阻尼系数;d为接触表面的临界相互渗透量,当接触渗透量小于d时,阻尼系数是渗透量的三次函数,大于d时,阻尼值达到最大cmax。
部分约束示意图如图1 所示。

图1 滑移门ADAMS 模型部分约束示意图
1.3 定义驱动
为模拟滑移门实际开闭过程,需在把手处设置驱动,按照企业对滑移门运动的规范,设置驱动运动速度为650 mm/s,将驱动定义为由STEP 函数控制的速度,其幅值随时间变化:650×(STEP(time,0,0,0.5,-1)+STEP(time,1.4,0,1.5,1)+STEP(time,1.7,0,2.2,1)),驱动定义的速度方向指向-X方向(车头方向)。 该step 函数表示从0 ~0.5 s 将速度从0 mm/s增大到650 mm/s,在0.5 ~1.4 s 内保持速度不变,此时车门正常开启;随后速度开始下降,直至1.5 s 减少到0 mm/s,车门静止后,从1.7 ~2.2 s 将速度再次增大到650 mm/s,由于此时函数中定义的速度方向与开启时相反,车门将关闭。
相较于以力作为驱动输入的方法,构建以初速度为输入,车门处操作力为输出的Adams 虚拟样机模型,不仅符合企业对滑移门操作力的相关规定,可以更加直观地得到在现行开门速度规定下滑移门操作力的大小,还可通过更改驱动速度得到不同开门速度下的滑移门操作力数据,从而有助于设计人员在设计初期对滑移门的操作力大小有所了解。
理想的滑移门滚轮(包括导轮和承重轮)在导轨上运动时应保持做纯滚动,且不与滚轮轴发生相对运动,这样可避免滚轮和导轨在切向的相对运动产生异响和摩擦,从而使得整个滑移门系统平顺性更好。
2 滑移门模型仿真分析
建模完成后即可在Adams/View 中对样机模型进行仿真分析,随后通过其后处理功能可以得到各部件的受力情况[7]。 由于车身上三条导轨的作用各不相同:上导轨和中导轨主要承担导向作用,下导轨主要起承重和导向作用,故各个导轨的姿态和定位要求也不同,市场上的一些车型为了使滑移门具有自动关闭的趋势,其中导轨相较上导轨与下导轨往往存在0.5°~1.5°的微小角度。 微小倾角的存在降低了滑移门在关闭过程中所需的操作力,并且赋予了汽车滑移门自动关闭的趋势,但是随着中导轨倾斜角度的增大,开启滑移门时所需的驱动力也将增大,过大的开门力不利于提升滑移门的感知质量,为研究导轨倾角对滑移门操作力的影响,取中导轨为研究对象,以导轨安装定位点为基准,旋转中导轨呈0.5°、0.8°、1°、1.2°、1.5°,通过仿真分析研究车门把手处X向力的变化情况。 通过查阅相关企业规范和市场调查,滑移门开门力与消费者使用体验的关系如表1 所列。

表1 滑移门操作力与用户体验
综上所示,具有较高感知质量的滑移门其开启力应控制在38 N 以下。
2.1 开门力仿真分析
当滑移门以650 mm/s 的速度开启,当导轨平直不存在倾斜角度时,车门把手处的开启力的变化如图2(a)所示。 在车门刚刚开启时,由于受到驱动施加的力作用,车门把手处的载荷存在短暂的突变现象,随着车门的开启,载荷逐渐趋向平稳。 随后把手处的载荷出现较大程度的波动,经过对运动过程的分析,发现载荷出现波动的主要原因是滑移门在开启过程中从导轨的平直段通过中导轨的弯曲段,滚轮与导轨中出现轨迹改变发生碰撞所致。 取车门关闭方向为正方向,故此时车门在开启时操作力为负值,取其绝对值。 当导轨不存在倾角时,开门过程中,开门力的平均值为31.4 N,均方根(RMS)为32.6,开启较为顺畅。 开门力仿真结果示意图如图2 所示,开门力的变化情况如表2 所列。
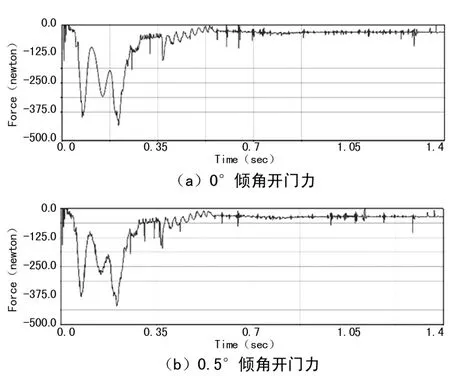

图2 开门力仿真结果示意图

表2 不同倾角下滑移门的开门力
仿真结果由表2 可知,随中导轨倾角的增大,开门力由倾角为0°时的31.4 N 增长到1.5°时的41.1 N,增长率为28.2%,倾角小于等于1°时,滑移门的开启均较为顺畅,不存在卡滞现象。
2.2 关门力仿真分析
关门力仿真结果示意图如图3 所示,关门力的变化情况如表3 所列。

表3 不同倾角下滑移门的关门力

图3 关门力仿真结果示意图

由仿真结果可知,由于中导轨倾角的存在,滑移门存在“自关”的趋势,关门力的平均值也由导轨倾角为0°时的34.4 N 降低至25.2 N,关门力降低26.7%,此时滑移门具有较高的平顺性,具备较好的感知质量。 在实际生产中,在开门力满足标准的情况下,可适当增加中导轨倾角,使滑移门获得自动关闭的趋势以提高感知质量。
2.3 分析结果
根据以上仿真结果,保持其他外界条件不变的情况下,设导轨倾角为自变量,开/关门力为因变量,利用MATLAB 软件中的数据拟合功能,对仿真结果进行拟合处理,得到倾角与开/关门力的近似函数关系表达式。 首先将数据导入MATLAB 中。 使用线性拟合模型y=a0+a1x进行拟合,线性模型具有计算简单、应用广泛的特点,故拟合类型选择多项式(Polynomial),Degrees 取1。 开/关门力的拟合结果如图4所示。
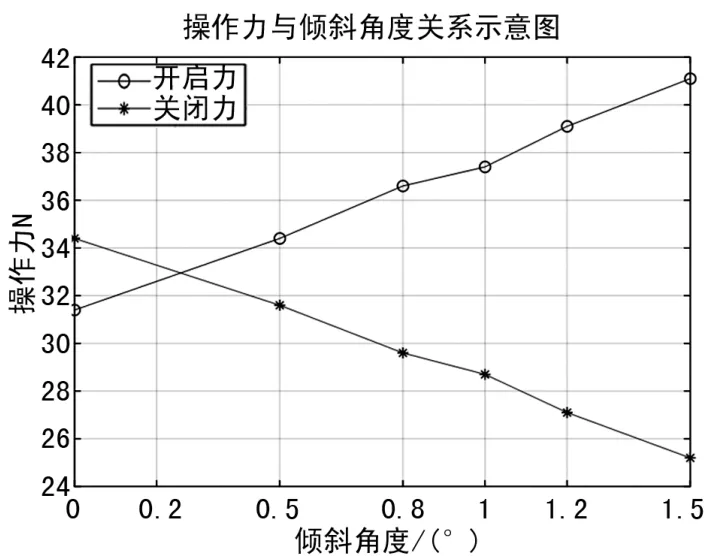
图4 操作力与倾斜角度关系示意图
由拟合结果可知,在其他条件不变时,开/关门力的大小均和导轨倾角存在线性相关。 由图4 可知,开门力拟合结果为:

其确定系数(R-square)接近1,说明该方程的变量对y具备较强的解释能力,即该模型对数据的拟合程度也比较好;由图4 可知,关门力与导轨倾角呈负相关,拟合结果为:

其结果也具有较强的可信度,方差(SSE)接近于0,说明模型选择和拟合程度较好。
3 结 语
文中以某车型滑移门系统为例,以滑移门导轨为研究对象,对滑移门系统的动力学仿真进行了研究。介绍了滑移门系统的运动原理,并构建了滑移门系统ADAMS 虚拟样机模型。
在其他条件不变时,改变不同导轨角度,对比不同条件下的开/关门力的大小,可以看出导倾角对滑移门的操作力存在一定程度的影响,通过比对无倾角与1.5°倾角时的操作力大小后得到开启力增大28.2%,关闭力减少26.7%,并通过MATLAB 软件的拟合功能得到了拟合程度较高的操作力与导轨倾角的函数关系式。 因此,在实际生产中可以在此结论基础上有针对性地调整导轨倾角,以达到提高滑移门系统感知质量的目的。 研究结果对滑移门系统的设计提供了理论参考。
