智能柔性船用减摇装置设计*
2022-11-28李勇辉刘奥铭徐嘉伟
瞿 芳,李勇辉,刘奥铭,徐嘉伟
(江苏海事职业技术学院 船舶与海洋工程学院,江苏 南京 211170 )
0 引 言
船舶摇晃一直是船舶航行的最大困扰。 配备减摇装置,能够提高船舶的安全性,改善船舶的适航性,提升船舶乘员的舒适性。 现有船用减摇装置存在影响船舶操纵、适用于高速航行、体积大等缺陷。 笔者利用陀螺减摇和自动控制原理,提出了一种新型船用减摇装置设计方案。 笔者主要阐述了该装置的工作原理、关键技术和控制系统设计,所设计的船用减摇装置能够实现柔性减摇、零航速减摇,能够实现船舶小角度摇晃甚至无摇晃,有广泛的应用价值。
1 现有船用减摇装置优缺点比较
目前,船舶减摇通用的方式是加装舭龙骨、减摇鳍、减摇水仓、减摇舵等装置。
舭龙骨是沿船长方向在舭部安装的连续型材,结构简单,可减摇30%左右,航行时减摇效能更加显著,但会降低船舶的可操纵性。 舭龙骨减摇应用广泛,多用于方形系数小的船舶。
减摇鳍又称侧舵,象机翼伸出船体外。 它依靠水流对其产生的作用力减摇,减摇效果取决于航速,低速航行时,基本起不到减摇作用,且结构复杂,造价较高,多用于高速船舶。
减摇水舱利用左右舷侧水舱液位高度差产生复原力矩减摇,低速航行能进行减摇,但只有减摇水舱的自摇频率高于船舶自摇频率时才能实现减摇,且减摇水舱在船上占据很大空间。
减摇舵利用操舵时产生的横摇力矩进行减摇,造价低,占用船内空间少,使用维修方便,但需要高速操纵器,低船速时减摇效果差。
近年来,出现了舵-鳍、减摇鳍-减压水舱、舵-可控被动水舱等船舶综合减摇装置,减摇效能得到改善,但只有在船舶行驶状态下才有效[1-2]。
2 新型船用减摇装置的工作原理
2.1 陀螺减摇原理
一个大惯量高速转动的转子,当其随船体摇晃时,高速转子会随着船舶摆动而产生一个巨大的与船舶摇摆方向相反的反作用力矩,此反作用力矩与推动船舶摇晃的波浪力矩相抵消,最终实现船舶减摇[3]。随着新技术的发展,特别是高速飞轮在真空下运转技术的应用,船用陀螺减摇得到广泛应用。
2.2 柔性减摇原理
根据船舶大小配置一定惯量的转子,再将转子拆分成多组小惯量转子,并由多个电机分别驱动。 根据船舶摇晃角度大小分别启动相应的电机及转子,实现柔性减摇[4]。
2.3 智能控制原理
用GPS 信息和大数据技术计算出船舶摇晃角度,再通过位移传感器送达可编程控制器,由事先编制的程序自动控制电机的开或停,实现多机并车机械的柔性传动[5]。 智能柔性船用减摇装置原理如图1所示。

图1 工作原理
3 新型船用减摇装置的关键结构设计
3.1 总体结构
智能柔性陀螺减摇装置主要由固定底座、转盘轴承、支撑架、电机、转子、阻尼油缸、控制器、电涡流位移传感器、感应探头等组成。
如图2 所示,固定底座1 上置转盘轴承9,转盘轴承上置支撑架2,支撑架上置电机5,电机前端设置活动轴4,电机外侧设置转子6。 电机的数量为四组,呈矩形阵列排布。 阻尼油缸8 的数量为若干组。 控制器接线孔11 的数量为四组,呈线性排布。 控制器10 的输入端口B 与电涡流位移传感器12 的输出端口A 电性连接。

图2 总体结构示意图
固定底座与转盘轴承活动连接,与控制器、电涡流位移传感器、阻尼油缸等固定连接。 转盘轴承与支撑架固定连接,支撑架外侧设置转轴3,转子与转轴3固定连接,转轴与支撑架活动连接。 活动轴通过转槽与电机活动连接,活动轴与转轴之间设置皮带7,转轴通过皮带与活动轴活动连接。
3.2 与船舱的连接
智能柔性减摇装置与船舱的连接如3 所示。 船舱连接板21 与固定底座通过螺栓杆20 连接,螺栓杆上部设置螺栓头16,同时设置自紧垫圈17 和防滑面18。 自紧垫圈的数量为两组,自紧垫圈的下端面设置固定锯齿19,固定锯齿与自紧垫圈固定连接。
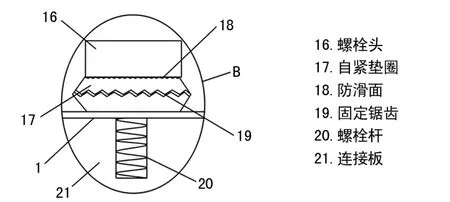
图3 与船舱的连接
3.3 延伸电缆设计
电涡流位移传感器另侧设置延伸电缆14,延伸电缆一端设置转接头13,另一端设置感应探头15,如图4 所示。
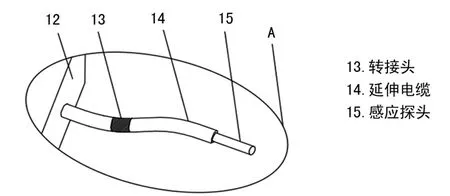
图4 延伸电缆
3.4 控制器设计
控制器设置有控制面板101、显示屏102、按键103、保护罩104、合页105 等,如图5 所示。 控制器前端外表面设置显示屏,显示屏一侧设置按键,按键的数量为九组,呈矩形阵列排布。 显示屏与按键的输入端口均与控制面板的输出端口电性连接。
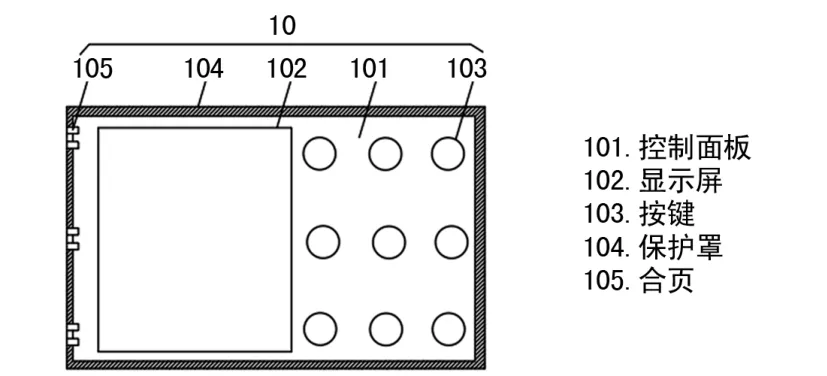
图5 控制器
3.5 减摇过程的实现
工作时,通过感应探头探测船体摇摆幅度,延伸电缆将信号传递给电涡流位移传感器(型号为:hg3200),电涡流位移传感器将信号传递至控制器(型号为:SL—GL01B),控制器根据电信号启动一定数量的电机运转。 电机带动活动轴转动,活动轴通过皮带带动转轴旋转,从而控制转子的旋转,转子输出稳定的动量矩以减少船舶的摇摆角度。
4 新型船用减摇装置的控制系统设计
4.1 开发运行环境
智能柔性船用减摇装置的控制系统开发环境:i7 7700 3.0GHzCPU, 8GB 内存,GTX1060 显卡,1TB 硬盘,Visual Studio 2008,.net3.5;运行要求:2 GHz 以上CPU,1GB 以上内存,20G 以上硬盘空间,.net3.5。
4.2 实现的功能模块
智能柔性船用减摇装置的控制系统采用大数据技术、C/S 模式,针对多组电机,通过更改分频数使得电机的实际转速与需要的转速一致。
整个系统设置了基本配置、参数设置、控制区域、行驶控制、报警信息、用户管理、帮助等功能,如图6所示。 基本配置主要进行串口设置及其摆动范围确认;参数控制主要是对电动机信息、GPS 信息、空速油门值、PI 控制等进行设置;控制区域主要设置行驶状态和更改行驶速度;行驶控制主要是对行驶路线的设置[5-6]。
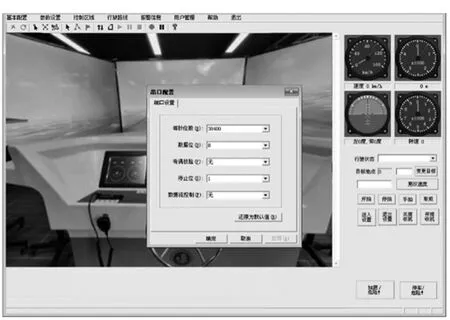
图6 控制系统
4.3 程序设计
智能柔性船用减摇装置的控制系统用C#语言编写,源程序代码9680 行如下:
/ / /<summary>串口配置标志</summary>
public String Flags {get;set;}
/ / /<summary>主机。 当前节点对应的主机</summary>
public String Master {get;set;}
/ / /<summary>范围确认数据状态<summary>
public Int32 LinkState {get;set;}
/ / /<summary>是否从节点</summary>
public Boolean Slave {get;set;}
/ / /<summary>控制参数当前节点的从节点集合</sum
mary>
public IList<Node>Slave {get;set;}
/ / /<summary>本节点位置视图数据槽</summary>
5 结 语
通过虚拟样机实验验证说明,此设计装置可以根据船舶摇晃角度大小分别启动一组或几组电机从而实现船舶柔性减摇,在船舶零航速下可以实现减摇,可以实现船舶±5°摇晃。 该装置已获国家实用新型专利(ZL2018219505410. 0) 授权和软件著作权(2021SR1940917)登记。
通过对自动控制多机并车柔性传动的船用减摇装置设计方案的分析及试验,可有效解决船舶的摇晃问题,实现了设计目标。 此装置不会影响船舶的航行,体积较小,质量较轻,摆放位置随意,特别是与船舶的航行速度无关,能够实现零航速下的船舶减摇,能够实现船舶小角度摇晃甚至无摇晃,通过增减电机及转子的方式使其可以用于任何船型和尺寸的船舶,尤其适于舒适性要求较高的豪华游艇。 此设计为进一步推广船用减摇装置应用提供了理论依据。
