一种物料清理转运装置的设计开发*
2022-11-28高波,李宁
高 波,李 宁
(榆林职业技术学院,陕西 榆林 719000)
0 引 言
在工农业生产以及日常生活中,经常出现大量物料与生活垃圾堆积在广场或路面的现象,尤其是当发生泥石流、洪水等自然灾害后,大量泥沙封堵路面,这些泥沙清理起来费时费力,而且缺少专门机械。 若堆积物较多且条件允许的情况下,由铲车等装载机将堆积较厚的物料(泥沙)铲掘在一起,通过卡车运送至指定位置后,再由人工或道路清扫车清理剩余的堆积物。 虽然铲车或者道路清扫车清理堆积物效率较高,但因场地限制以及投入成本高等问题影响,泥泞道路的清理还存在很多挑战。 国内外学者针对这一问题进行了多方面研究[1-4],设计出泥沙清理和泥水分离的装置,但是针对泥沙清理转运和场地清扫功能一体化装置的报道较少。 笔者结合现场生产实际需求,为方便工农业及日常生活物料的转运,尤其是提高泥沙清理的效率,专门提出一种物料清理转运装置设计方案,并结合智能控制系统进行研究和设计,其目的是实现工农业生产物料和泥沙的转运及清理功能。
1 物料清理转运装置的设计
1.1 结 构
物料清理转运装置主要由驱动模块、滚筒切削装置、固液分离装置、传送装置、自动清扫装置、收集箱、动力系统、控制系统和其他辅助装置构成,主要结构原理如图1 所示。 驱动模块1 放置于机架7 上,滚筒切削装置2 在最前端,滚筒切削装置下方有固液分离装置3,滚筒切削装置紧连着传送装置4,自动清扫装置5 位于机架下方紧贴地面,收集箱6 放在传送装置的末端。

图1 物料清理转运智能装置
1.2 工作原理
此装置可通过四轮驱动系统向前推进,并实现转弯。 滚筒切削装置上的铲斗收集物料,经传送装置输送至收集箱或者运输车。 底部的自动清扫装置可清除残余物料,并配备有负压收集装置和洒水器,防止尘土飞扬。 铲斗装置高度、滚筒转速及传送带速度等参数可通过分析传感器的数据进行调整,在使用时可以智能控制。 以清理道路泥沙为例,该装置对泥沙的清理转运流程如图2 所示。 道路上的泥沙属于泥水混合物,主要被滚筒切削装置清理,少部分需要自动清扫装置清扫。 如果滚筒切削装置中的泥沙含水量大,则需要进行泥水分离。 泥沙经过传送装置进入收集箱,收集箱中多余的水分也可通过泥水分离装置收集至储水器中。 储水器中的水可用于喷洒除尘或者冲洗污渍。

图2 泥沙清理转运图
2 关键结构与系统设计
2.1 切削装置
滚筒切削装置由铲斗和滚筒构成,如图3 所示,滚筒安装在铲斗上,为螺旋状对称结构,主要由电机带动减速器,经皮带传动实现旋转,目的是将泥沙卷进滚筒内,并在向前推进过程中能将泥沙收集并放置在传送带上,提高工作效率且减少劳动强度。 该装置可根据泥沙的厚度调整铲斗的高度。 滚筒旋转的同时铲斗可上下运动,实现不同厚度的泥沙清理。 前进速度和铲斗高度决定了清理的体积,滚筒和传送带的转速则决定了清理的泥沙能否及时全部收集。 滚筒和铲斗之间有一定间隙,防止被小石子卡死。 滚筒传动轴上安装的传感器可将数据实时传送至控制系统,当检测到受力过大导致滚筒卡死时,及时减少滚筒速度并反向旋转,通过同时整体后退的方法及时退出被卡异物。
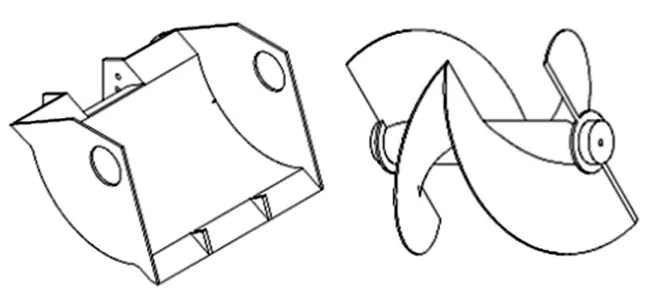
图3 滚筒切削装置示意图
2.2 固液分离装置
当清理含水较多的泥沙时,需要进行固液分离,方便收集和转运。 滚筒最下方有排水孔,液体经过排水孔后被收集,滚筒的旋转能防止收集孔堵塞。 经过滤后可为喷洒装置提供水源,也可通过水泵直接喷射至花坛、草坪或其他合适位置。
2.3 传送装置
传送装置主要是将滚筒切削装置收集的泥沙升高并转移运至本装置自带的收集箱或随行卡车中,收集箱下端有液压装置,可倾倒储存的泥沙。 传送装置由电机经过减速后驱动大倾角输送带传送,实现泥沙的提升,其电机转速主要由输送泥沙的体积决定。 同时,输送带末端有拨转装置,可改变泥沙的收集形式。如果道路被较多泥沙覆盖,可直接将收集的泥沙抛洒至道路两边,以最快的速度疏通道路,为后续救援争取时间。
2.4 自动清扫装置
为了进一步清扫滚筒切削装置未能清理的泥沙,可使用自动清扫装置辅助清扫道路。 自动清扫装置由清扫刷、喷淋装置和负压吸尘器构成,可清理泥沙也可强力冲洗泥污。 清扫刷旋转时将残余泥沙清扫至储存仓,负压吸尘器则吸取细小泥沙及灰尘。 喷淋装置可喷洒收集到的分离水,用于除尘。
2.5 动力系统设计
该装置分为油动和电动两个版本,动力可由动力电池或发动机提供。 装置能兼容新能源车的动力电池,也可将其动力电池阶梯利用,使电池的全生命周期得到充分利用。
2.6 控制系统设计
该装置的前进速度、铲斗高度、滚筒转速及传送带速度等参数可根据实际工况及时调整,以便智能控制,控制系统整体思路如图4 所示。 当系统启动后会进入初始化状态,读取相关设置信息。 根据清理的工况选择相关设置,可以选择清理泥沙、清扫路面、清理泥沙的同时清扫路面、自动操作和手动控制等模式。

图4 控制系统原理图
2.6.1 清理泥沙
使用清理泥沙功能时,先启动传动装置,让传送带开始旋转;然后启动切削装置,让滚筒开始旋转并调整铲斗高度;设置泥沙堆放的形式,可将泥沙倒入随车收集箱、运输卡车或者直接抛洒至路边。 通过驱动系统移动位置,即可实现连续泥沙清理。
2.6.2 清扫路面
当使用清扫路面功能时,启动喷淋装置减少扬尘;转动清扫滚刷,将泥沙扫入收集箱;开启负压吸尘器,进一步收集泥沙和细小灰尘。 清扫路面功能启用后,在清扫较厚泥沙的同时,一次性将路面清扫干净,免去了人工二次清扫的麻烦。
2.6.3 数据处理
为了实时获取各个部位的工作状态,在滚筒、传送带和固液分离装置上均安装有传感器。 传感器数据传送至控制器后,可判断是否出现卡死、输送不及时、功率不足等问题,经过数据分析后调整转速、功率、喷洒等参数,通过单片机控制器实现各个部件的联动控制。 分析数据可以反馈至各个执行机构中,也可以为人机互动控制提供准确指导。
3 性能特点
该装置可有效地提高泥沙清理的效率,并减少人工劳动强度。 其主要特点是:①通过带螺旋滚筒的铲斗收集不同状态的物料,能自动调整参数且收集效率高;②结合运输机构和负压收集装置,通过随车运送、他车运输和就近抛洒等方式处置反应物或泥沙,适合多种工作场合;③滚筒、传动装置、清扫装置等均有传感器,其数据由控制器分析后进行优化,最大可能地提高泥沙清理的效率。
4 模拟应用
根据此设计思路,以清理洪水过后路面堆积的泥沙为案例进行研究,并进行可行性验证。 加工的演示模型如图5 所示。 模型主体结构由木板和3D 打印构件加工而成,通过数字电机及舵机完成执行机构,由锂电池提供动力,通过单片机实现智能控制。

图5 演示模型
实验时,分别利用干沙子(模拟沙漠风暴后埋没道路)、湿沙子(模拟雨后沙子堆积道路)、半干泥土(模拟灾后道路抢修不及时导致板结)和沙子中掺有小石子等工况进行研究,各工况如表1 所列,让演示模型在行进中清理泥沙。

表1 模拟工况汇总表
通过实验,得出如下结论。
(1) 文中提出的智能泥沙清理装置设计可行,湿沙子清理效果最好,基本上能完成清理。
(2) 干沙子可以清理,但是道路清扫时灰尘较大,演示模型的过滤装置需进一步完善,以避免实际应用中出现此问题。
(3) 可以完成半干泥土的清理,但是由于演示动力不足,导致切削装置无法切削坚硬的土块,此问题实际应用中也能避免。
(4) 掺有小石子后偶尔发生了卡顿,主要原因是石子卡在滚筒缝隙中,滚筒与铲斗之间的间隙和结构还需要进一步改进,本装置适合在石头较少的工况下使用。
5 结 语
针对工农业及日常生活物料清理和转运中存在的问题,尤其是泥沙清理的问题,通过对一种物料清理转运装置设计方案的分析应用,基本实现物料(泥沙)收集、固液分离、装载转运和道路清扫等一体化功能。 但模拟应用试验中该装置也存在需要改进的地方,例如在泥沙中混有石头时有可能发生卡死现象。 因此,针对后续的设计改进方面,可通过图像识别技术分析周围环境数据,判断清理物料中是否有较大石头或其它坚硬物体,防止滚筒被卡死甚至破坏。当判断异物无法通过滚筒时,滚筒前端可设置叉子将其直接铲至传送带。 此外,还需要增加路径规划系统,通过图像识别系统自动规划清理区域,以便进一步提升清理效率。 本装置可有效地提高工农业生产物料的清理和转运效率,减少工人劳动强度,具有一定的推广应用价值。
