基于改进暗通道先验的车牌图像去雾方法研究*
2022-11-28石冬阳张俊林贾兵聂玲杨慧敏
石冬阳,张俊林,贾兵,聂玲,杨慧敏
(1.重庆科技学院 电气工程学院,重庆 401331;2.湘潭大学 数学与计算科学学院,湖南 湘潭 411105)
0 引言
随着社会经济快速发展,车辆逐渐成为我们日常必不可少的交通工具,车牌识别系统因此被应用到道路监控中,一定程度上提高了交通管理的效率。在无雾的场景下,车牌识别系统能获得较好的识别效果[1];在雾霾天气下,受到大气中悬浮颗粒的影响,使得图像可见度降低[2],车牌识别系统采集到的车牌图像变得模糊不清,图像中车牌信息特征无法及时有效呈现出来,导致车牌定位与识别的精度严重下降。
为了直接有效地提升车牌识别精度,必须首先对车牌识别系统采集到的图像进行去雾处理。在图像去雾方法中,图像增强和图像复原是两种常见的去雾方法。前者在处理具有复杂结构的有雾图像时效果并不理想。后者基于大气散射模型,进而求解无雾图像,获得了较好的图像去雾效果,但自身仍有局限性。Tan[3]采用最大化恢复图像的局部对比度来消除雾霾,但结果中出现了图像色调饱和的现象。He 等人[4]提出了基于导向滤波的暗通道去雾算法,缩短了去雾时间,但在处理含有天空等明亮区域的雾霾图像时出现了颜色的失真和偏移。Tarel等人[5]构建大气耗散函数以实现图像去雾,去雾结果中出现了颜色失真的现象。Fattal等[6]通过计算场景内反射率得到无雾图像,但该方法不适用于模糊图像和灰度图像。目前暗通道先验去雾算法取得了较好的去雾效果,但该算法处理含有天空等明亮区域图像时存在颜色失真和偏移等问题,故本次在暗通道先验去雾算法的基础上进行相应的改进。
1 暗通道先验去雾原理
近年来暗通道先验去雾算法以去雾效果优良的特点得到广泛的应用[7],其去雾基本原理如下。
在图像去雾领域中,式(1)所描述的大气散射模型得到了广泛的运用[8-9]。
I(x)=t(x)J(x)+A(1-t(x))(1)式中,x 表示有雾图像中每个像素点所对应的位置,I(x)表示采集到的有雾图像,J(x)表示需复原的无雾图像,A与t(x)分别表示大气光值与透射率,t(x)J(x)与A(1-t(x))分别表示场景直接衰减项与环境光项。
根据暗通道定义,在非天空等明亮局部区域中,某些像素至少有一个通道值趋近零,对于一幅图像J(x),暗通道表达式如式(2)所示:

以x 为中心的局部区域运用Ω(x)来表示,RGB 通道值运用上标c 来表示。由暗通道先验理论可以知道,对于非天空区域的清晰图像而言,其暗通道值趋近于零,即Jdark(x)→0。
根据大气散射模型,化简后的式(1)如下:

首先,假设此时透射率t(x)为一常数,记为,A值是已知数值,对式(3)两边同时进行两次最小值运算后的表达式如式(4)所示:

J(x)为所求无雾图像,根据暗通道先验理论:


为了使拍摄到的图像更加接近真实场景,通过引入因子ω 对透射率进行修正,如式(7)所示:

针对大气光值A 的求解,通常在图像暗通道中取最亮的前0.1%的像素,然后在原雾霾图像中找到与之对应亮度点的值,将该值作为大气光值。
假如所求透射率偏小,则造成所求无雾图像存在失真现象,因此对透射率设定下限值t0以防止无雾图像失真,当求得的透射率值小于t0时,取t=t0。此时已知透射率值与大气光值,并代入到式(1),求解得到的无雾图像表达式如式(8)所示。

He 等人为减少细化透射率所需要的时间,运用导向滤波法来代替软抠图法,提升了去雾效率。
2 车牌识别模型的改进
为提升车牌识别精度,本次将改进型暗通道去雾算法引入到车牌识别系统中,如图1 所示。
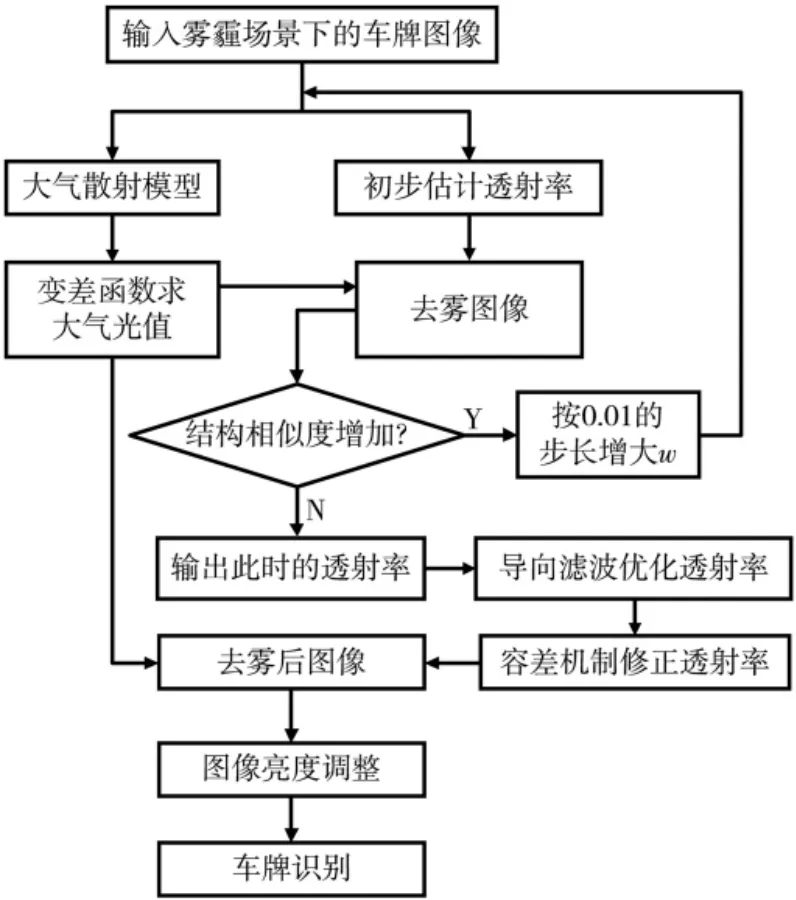
图1 改进后车牌识别模型
2.1 受限大气光值
当最小值滤波窗口过小时,暗通道先验去雾算法对暗通道图像白色区域的腐蚀并不彻底,使得大气光值取值到该白色区域,此时所得的大气光值A 将大于真实值,根据式(7),此时透射率值将取值过大,造成去雾后图像发生失真。针对以上问题,本次对所求大气光值A进行限制,以防止大气光值A 取值过高,修正后大气光值A 表达式如下:

在式(9)中,当大气光值A 大于225时,令A 等于225;当大气光值A 小于225时,令大气光值保持不变,实现了对大气光值取值过大的限制。
2.2 去雾引入因子的优化选择
引入因子ω 的选值直接影响着图像结构相似性,为了获得最佳的图像结构相似性,本次设置ω 的取值范围为[0.8,1],根据0.01 的步长增大ω,通过不断增大ω 的值,得到对应图像结构相似度的值,并进行统计分析,如果图像结构相似度开始出现下降的现象,将此时的临界值作引入因子的最佳值,此时求得透射率值即是最优透射率值。
2.3 明亮区域透射率的修正
当图像中的场景为天空或一些明亮区域,暗通道值远远大于零,此时天空等明亮区域的暗通道值和大气光值很接近,表达式如式(10)所示。

根据暗通道先验去雾算法原理,当图像中存在天空或明亮区域时,此时所求的透射率值为:

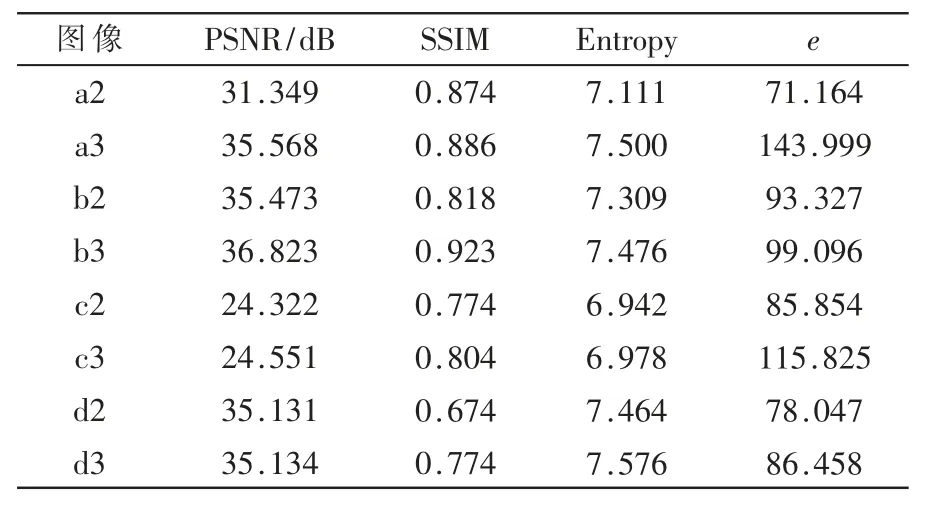
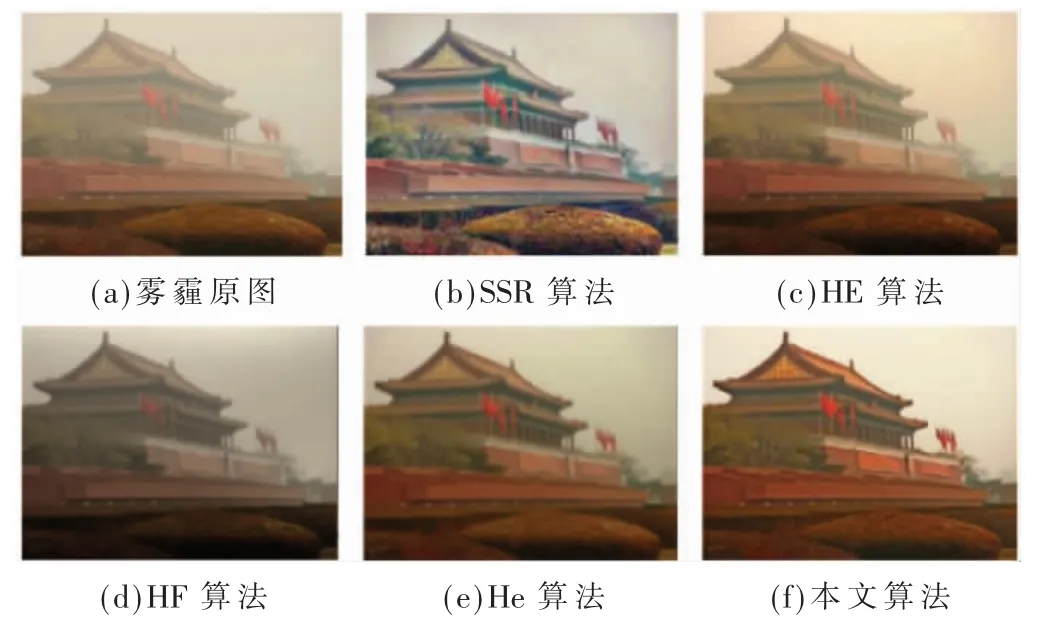
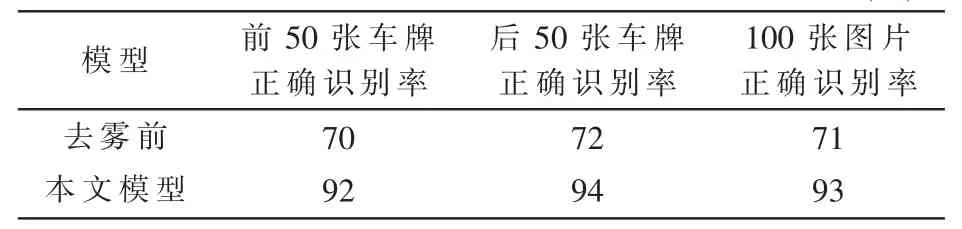
此时的图像暗通道值接近于环境大气光值,引入因子是一个趋近于1 的常数,故所求得透射率值是一个趋近于0 的数值,低于透射率的真实值,导致所求无雾图像发生失真的现象。为解决以上问题,本次引入容差机制来实现对透射率的修正,首先引进一个容差参数K,将|I-A|定义为差值,当|I-A| 图像亮度一直是影响图像可视化效果的主要因素,通常利用RGB 模型与HIS 模型的相互转换关系来实现图像亮度的调整,本次为提高图像亮度调整的效率,在图像去雾的基础上通过乘以相应的系数以提高图像整体的亮度,使得亮度调整后图像具备更多的细节信息,特征更加明显。 3.1.1 峰值信噪比(PSNR) 在图像处理中通常采用峰值信噪比(PSNR)来评价一幅图像处理后的效果,其值越高,说明图像对噪声处理效果越好[10-11],噪声因子越低。关于图像峰值信噪比的计算,主要定义均方差MSE 与图像的灰度级两个变量,PSNR 计算公式如下: MAX 指图像灰度级,表达式为MAX=2B-1,B 指编码一个像素所用的二进制位数,即B=8,此时MAX 取值为255,MSE 为图像均方差。 3.1.2 结构相似度(SSIM) SSIM 对去雾前后两幅图像的亮度、对比度和结构进行相似度评估,表达式如式(14)所示: 其中L(I,J)表示亮度,C(I,J)表示对比度,S(I,J)表示结构。SSIM 值越大,代表去雾后图像失真程度越小,与原图的相似程度更高[12-13]。 3.1.3 图像信息熵(Entropy) 信息熵能够衡量图像中平均信息的多少,熵值越大说明图像中的轮廓信息越清晰[14-15],一般用符号H 表示,单位是比特,表达式如式(15)所示。 式中xi表示图像像素值,P(xi)表示像素值xi出现的概率,log(2,P(xi))表示以2 为底的函数。 3.1.4 图像均值(e) 图像去雾的效果还可以通过图像均值来衡量,图像均值越大,代表去雾后图像的整体亮度越高。 为了验证改进后算法与传统暗通道先验去雾算法在处理天空等明亮区域的差异性,本次在4 GB 内存、64位Windows 10 系统上,采用MATLABR2018b 实验平台对四幅含有明亮区域图像进行去雾处理,结果如图2 所示。图2 中的(a1)~(d1)代表四幅含有明亮区域的雾霾图像,(a2)~(d2)代表运用传统暗通道先验去雾算法得到的结果图像,(a3)~(d3)代表运用改进型暗通道先验去雾算法得到的结果图像。 图2 含有明亮区域图像的去雾结果 由实验结果可知,运用暗通道先验去雾算法处理含有明亮区域图像时出现了颜色失真和偏移现象。运用本文算法处理后的图像弥补了原算法处理后图像存在的缺陷,使得去雾后图像更加接近于真实图像,减小了处理天空等明亮区域图像的失真程度,去雾可视化效果更优。为客观对比原算法与本文算法的差异性,对以上四组实验结果进行定量性能评估,结果如表1 所示。 表1 性能评价结果 由以上数据可以看出,运用改进型暗通道先验去雾算法得到的去雾结果在PSNR、SSIM、Entropy、e 性能指标上相对于改进前分别平均提升1.934 dB、0.082、0.235、38.995,运用本文算法得到的结果不仅具备了更高的抗噪性能,失真程度最低,并且图像整体亮度有所提升,图像轮廓更加清晰,验证了本文算法相对于改进前具有相对的优势。 单尺度Retinex 算法(SSR 算法)、直方图均衡化算法(HE 算法)、同态滤波(HF 算法)、暗通道先验去雾算法(He 算法)是当前主流去雾算法,为了验证本文算法的有效性与优越性,本次在4 GB 内存、64 位Windows 10 系统上采用MATLABR2018b 实验平台进行了三组实验,如图3~图5 所示。其中图3 中的6 幅图像分别代表雾霾原图、SSR 算法处理结果、HE 算法处理结果、HF 算法处理结果、He 算法处理结果、本文算法处理结果。 图3 实验1 结果 由以上实验结果可知,运用不同的图像去雾算法对同一幅雾霾图像进行处理后得到的结果各不相同,其中运用SSR 算法处理后的结果在颜色上存在明显的失真问题,直方图均衡化的处理结果存在局部白场过度的现象,同态滤波算法处理后的结果图像在颜色上与原图存在较大差异,运用本文算法相对于改进前暗通道先验去雾算法得到的结果具有更好的可视化效果与图像亮度,并且去雾后图像特征更加明显,更加接近于原图。 为客观对比图像去雾效果的差异性,分析各种去雾算法去雾效果的不同,对去雾后图像进行性能评估,评估结果如图6 所示。 图4 实验2 结果 图5 实验3 结果 图6 不同去雾算法下去雾结果性能对比 从结果数据上来看,运用本文算法得到图像PSNR值达到了最高,说明运用本文算法得到的图像结果具有更好的抗噪性能,同时运用本文算法得到的结果图像在SSIM 值与Entropy 值也取得了较好的结果,进而说明本文算法处理后的图像更加接近于原图像,失真程度最低。 为验证所提车牌识别模型的有效性和优越性,本次对去雾前后的车牌图像进行仿真实验。首先按照边缘检测、图像二值化、形态学闭操作、提取轮廓、输出车牌的步骤来实现车牌定位;其次利用字符间不连续特性,获取单个字符图像,实现字符分割;最后根据BP 神经网络能够实现各种非线性映射的特点,利用BP 神经网络识别分割后的字符,实现车牌识别功能。 图7 中的两幅图像分别代表雾霾场景下采集到的原图、运用本文去雾算法处理得到的结果图像。图8 中的三幅图像分别表示在去雾处理的基础上得到的车牌定位结果、灰度化结果、倾斜矫正结果。图9 中的三幅图像分别表示图像二值化结果、去雾前车牌识别结果、去雾后车牌识别结果。 图7 雾霾原图、去雾后图像 图8 车牌定位、灰度化、倾斜矫正 图9 图像二值化、去雾前识别结果、去雾后识别结果 由图9 结果可知,当图像中含有雾霾时,车牌识别结果中出现了车牌定位错误的现象,说明图像中雾霾的存在不仅降低了图像质量,并且已经影响到车牌识别系统识别的精度。经过图像去雾去噪预处理后,再次对该图像进行车牌识别,基本能够正确识别出车牌,说明本文所提出的车牌识别模型能够有效提高图车牌识别精度。 为了验证本文算法的优越性,取100 张车牌识别系统采集到含有雾霾的车牌图像,100 张雾霾图像均来源于不同地点,具有客观随机性,分为两组进行实验。本次在去雾前与运用本文模型分别进行车牌识别测试,测试结果如表2 所示。 表2 识别测试结果 (%) 由表2 数据可知,100 张含有雾霾的车牌图像在去雾前车牌识别的正确率是71%,运用本文所提的车牌识别模型得到的车牌识别正确率达到了93%,相对于改进前车牌识别正确率提升了22%,说明了本次建立的车牌识别模型取得了较好的结果。通过对图像进行去雾处理,不仅能够提升图像质量,减少图像失真程度,丰富图像信息,同时能够提升车牌识别系统识别的精度,验证了本次所提模型的有效性与优越性。 本次针对雾霾场景下车牌识别系统存在识别精度较差的问题,提出改进型车牌识别模型。改进型车牌识别模型首先对车牌图像进行去雾处理,针对暗通道先验去雾算法在处理含有天空等明亮区域图像时产生颜色失真和偏移等问题,从大气光值、引入因子、容差机制、图像亮度的角度对原算法进行相应的改进,仿真实验表明运用改进后去雾算法得到的去雾性能相对于改进前均有所提升,验证了改进后去雾算法的有效性。最后将去雾前后车牌图像分别送入到BP 神经网络进行识别测试,结果表明运用所提模型能够有效提高车牌识别精度,验证了所提模型的有效性与优越性。车牌识别系统处于复杂多变的道路环境,采集到的图像受到环境中多因素的影响,如何减小这一影响是一大难点,也是未来需要重点研究的内容。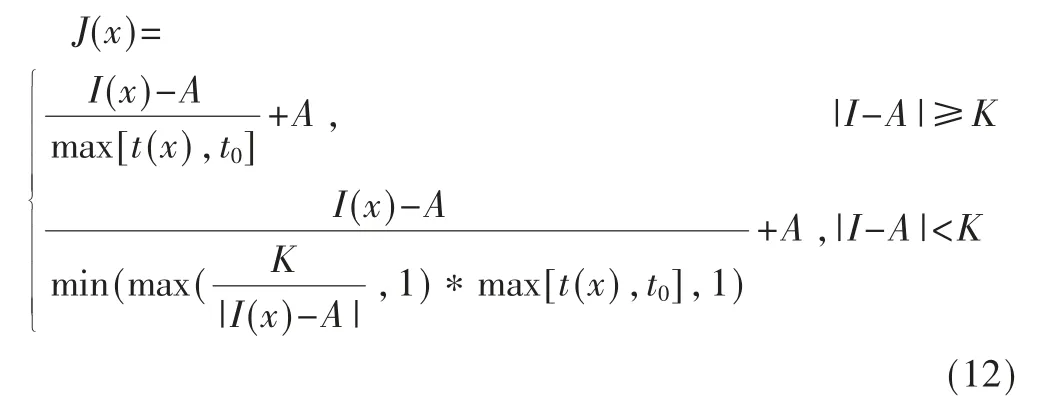
2.4 图像亮度增加
3 仿真实验与分析
3.1 去雾后图像性能评价指标



3.2 图像明亮区域的仿真实验

3.3 图像去雾效果仿真实验



3.4 模型改进前后车牌识别效果的对比



4 结论