主动配电网灵活孤岛划分与实时调度策略
2022-11-28庞凯元王崇宇文福拴薛禹胜
庞凯元,王崇宇,文福拴,薛禹胜
(1. 浙江大学电气工程学院,浙江省 杭州市 310027;2. 南瑞集团有限公司(国网电力科学研究院有限公司),江苏省 南京市 211106;3. 智能电网保护和运行控制国家重点实验室,江苏省 南京市 211106)
0 引言
近年来,因自然灾害、恶意攻击引起的电力系统停电愈加频繁,造成了巨大的经济损失和严重的社会影响[1]。对于配电系统而言,由于上级电网(主网)在这些极端事件发生后往往也处于故障状态,难以直接通过倒闸操作利用主网对配电系统中的负荷恢复供电。此种情况在灾害天气导致的大停电中已出现过多次,如2021 年中国河南水灾导致的省内多地停电[2]、极端严寒天气造成的美国得克萨斯州大停电[3]等。这些停电案例表明利用分布式电源(distributed generator,DG)形成配电孤岛恢复重要负荷(如医院、政府机关等)的潜力还有待发掘。随着风电、光伏等可再生能源发电与储能的广泛接入与需求侧响应机制的实施,未来的配电系统将发展为可控、可调的主动配电网(active distribution network,ADN)。各类DG 与可控负荷接入ADN 对促进间歇性可再生能源发电消纳、降低碳排放具有积极意义,但也给故障后ADN 的恢复问题提出了新的挑战。ADN 应对极端故障的处理是多阶段决策过程,包括故障诊断与隔离、孤岛运行、检修恢复等。其中,利用本地发电资源形成配电孤岛恢复重要负荷,有利于隔离故障、降低停电损失,是提升配电系统弹性的重要手段[4]。
自然灾害等重大事件发生后电力系统弹性可按时间划分为3 个阶段:故障发生阶段、降级运行阶段和恢复阶段[5-6]。降级运行阶段承受事故损失,也为恢复阶段做准备,具有承上启下的作用。对于与上级电网断开连接的配电系统,在这一阶段利用DG形成配电孤岛,恢复重要负荷,等待配电系统故障修复或上级电网恢复供电,是降低事故损失、提升电力系统弹性的重要手段。国内外对于降级运行阶段中配电孤岛的形成方法已有许多研究。文献[7]以配电系统故障前的线路有功功率绝对值作为线路权重,并采用最大生成树算法求解配电孤岛的拓扑。文献[8]以节点的有功负荷量作为节点权重,利用Dijkstra 算法寻找DG 到重要负荷的供电路径。文献[9]基于辐射状配电系统的父子节点关系约束每个节点与DG 的连接关系,进而得到以每个DG 为根节点的配电孤岛拓扑。文献[10]利用深度搜索寻找每个DG 与重要负荷之间的供电路径,通过评估每条路径的安全性与供电时间确定配电孤岛的拓扑。文献[11]基于DG 与节点的供电路径初步划分配电孤岛,并提出了一种计及需求侧响应和静态安全约束的孤岛拓扑调整策略。文献[12]基于虚拟潮流建立配电孤岛的连通性与辐射性约束,提出了一种恢复重要负荷的配电系统孤岛划分策略。在此基础上,文献[13]提出了整合孤岛划分、故障区域识别、故障隔离和系统恢复的配电系统弹性提升策略。与传统的配电系统相比,ADN 中可嵌入各类分布式发电机组,且发电资源逐步多样化,运行方式也更加灵活,基于故障前的电气状态(如线路潮流、节点功率等)制定配电孤岛划分策略[7-8]未必是最优的。此外,在ADN 中网络结构与潮流方向都是可变的,DG 与负荷节点间存在多条供电路径,文献[9-11]提出的配电孤岛划分方案难以直接应用于ADN 孤岛划分。
针对传统配电系统发展的孤岛优化运行策略大多将DG 出力描述为介于最小与最大出力之间的可调度量[14-15]。由于风电、光伏的接入,ADN 的恢复策略须考虑这些间歇性发电资源出力的不确定性,以避免由于其出力波动导致恢复策略失效。在ADN 孤岛运行模型中,一般采用2 种方法处理间歇性发电资源出力的不确定性,即随机优化和鲁棒优化。随机优化模型采用概率分布模型模拟间歇性电源的出力,并通过机会约束规划或蒙特卡洛抽样转化为确定性模型求解,获得满足一定置信水平的最优孤岛运行策略[16-17]。鲁棒优化方法则采用不确定性区间描述间歇性电源出力的不确定性,在该不确定性区间内寻找最恶劣的运行场景,并求解使该场景停电损失最小的孤岛运行策略[18-19]。
在上述背景下,针对极端事件发生后无法利用主网支持恢复的配电系统,本文提出一种ADN 灵活孤岛划分与实时调度策略,以降低停电损失、提升ADN 的弹性。具体地,首先,基于环路消除辐射状约束建立ADN 孤岛划分模型,将DG、重要负荷与普通负荷灵活划分至不同的配电孤岛,并与基于虚拟潮流的孤岛划分模型的求解效率进行了对比。然后,针对风电、光伏的短期出力预测误差较小的特点,采用滚动优化方法实时更新每个调度时段的配电孤岛运行策略。最后,提出一种计及预测误差的间歇性电源有功出力控制策略,以保证所制定的自主运行策略在考虑间歇性电源发电出力预测误差时的可行性。
1 ADN 的孤岛划分与自主运行
本文所提ADN 孤岛划分与自主运行策略针对配电系统中无法利用上级电网恢复(或上级电网处于故障状态)的区域,而DG 的发电出力有限,难以为系统所有负荷供电,此时形成规模较小的配电孤岛不仅有利于维持重要负荷运行,还可有效避免故障进一步扩大、造成连锁故障。
在配电孤岛中,由于间歇性电源的惯性较低、时间常数较小,孤岛电压和频率可能会随外界波动快速变化,极端情况下甚至会导致失稳,造成二次故障。配电孤岛稳定的前提是参数适当的初级和二次控制策略,以保证DG 具有足够的电压和频率调节能力[20]。电池储能系统由于其快速的动态响应特性可以支撑配电孤岛内的功率平衡,从而提升配电孤岛的频率调节能力[20]。为维持所形成配电孤岛的稳定性,本文在构建间歇性可再生能源发电系统模型时引入电池储能系统,以增强DG 的电压和频率调节能力。此外,不具备电压和频率调节能力的DG(如在集中二次控制模式中DG 和控制中心通信故障)不能作为配电孤岛中唯一的电源。
配电系统的拓扑可用无向图G=(N,E)来表示,其中N和E分别为配电系统中节点与线路的集合。为便于表示,定义Ncl为重要负荷所在节点的集合;Ndg为DG 所在节点的集合;S为配电孤岛的集合,配电孤岛数量的上限由具有电压和频率控制能力的DG 数量确定;L为配电网络所含环路的集合。
1.1 ADN 的孤岛划分模型
传统配电系统具有单一电源的辐射状拓扑,根据潮流方向可唯一指定除根节点(电源节点)外所有节点的父节点,利用生成树(spanning tree,ST)约束可维持孤岛的拓扑连通性与辐射状[21-22]。然而,此种方法难以应用于ADN 的孤岛划分,主要原因为:一方面,DG 的出力波动导致潮流方向不确定,不能根据潮流方向唯一给定父-子节点关系;另一方面,ADN 含有数量众多的DG,可以被分解为多个孤岛,采用ST 约束求解可能会得到含“伪根节点”的环状网络[23]。为克服上述缺点,可基于虚拟潮流辐射状约束建立ADN 的孤岛划分模型[12-13]。然而,此类模型要求引入额外的变量以模拟虚拟线路潮流,这会增加孤岛划分问题的求解难度。为此,本文提出一种基于环路消除辐射状约束的ADN 灵活孤岛划分模型,以克服基于ST 模型的缺点,即消除了产生环状网络的可能性,并与基于虚拟潮流辐射状约束的模型的求解效率进行对比。所提ADN 的灵活孤岛划分模型可表示为:
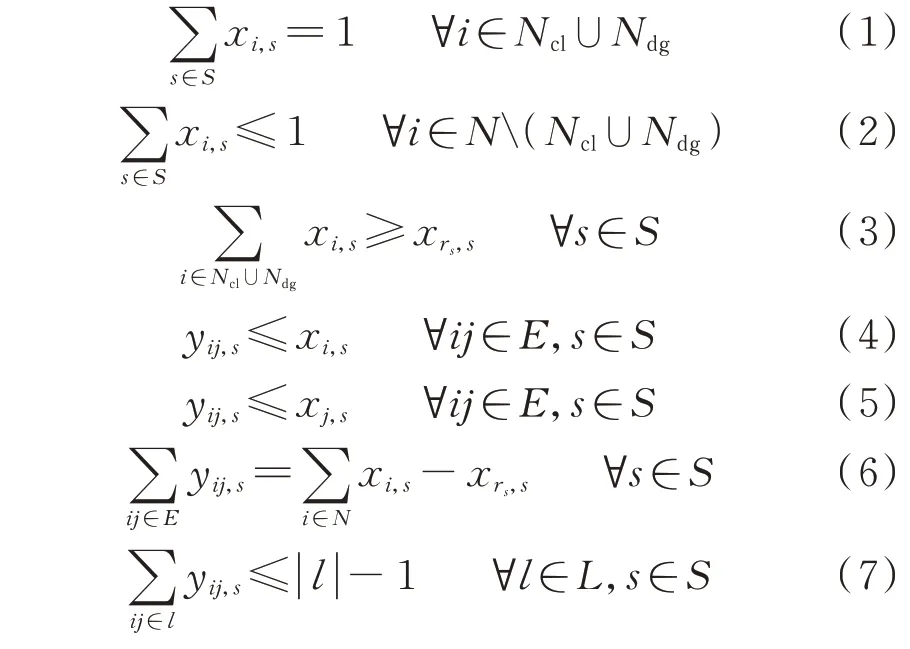
式 中:xi,s和yij,s分 别 为 配 电 孤 岛s中 节 点i与 线 路ij的状态,取值为1 表示投运、取值为0 表示断开;下标rs为第s个配电孤岛的潜在根节点,包括小型水电站、燃气电站以及具备电压和频率调节能力的风电场和光伏电站;l为组成环路的配电线路集合,该组配电线路的数量用 ||l表示。值得注意的是,第s个配电孤岛存在与否取决于xrs,s的取值,取值为1 表示配电孤岛s的根节点是rs(即rs作为根节点的潜在性被确定),意味着孤岛划分方案中存在配电孤岛s;取值为0 则表示第s个配电孤岛没有根节点(即rs作为根节点的潜在性被否定),配电孤岛s不存在,与之对应的第s个DG 可被划分至其余孤岛。
式(1)表示ADN 中的重要节点(包括重要负荷与DG 所在的节点)必须被划分至某一配电孤岛;式(2)表示其余普通节点可以不被划分至任意孤岛;式(3)表示每个孤岛至少包含一个重要负荷节点以及一个DG 节点;式(4)和式(5)表示若配电线路ij被划分至孤岛s,则其两端的节点也须被划分至同一孤岛;式(6)和式(7)共同维持每一孤岛的拓扑连通性与辐射性,式(6)要求每一孤岛内节点与线路数量之差为1,式(7)则确保每一孤岛内所有环路都是开断的。式(6)和式(7)称为环路消除的辐射状约束,其中L的寻找方法可参考文献[24]。
潜在根节点rs的选取应基于孤岛划分前对DG的电压、频率调节能力的评估结果。例如,采用旋转发电设备(如汽轮机、水轮机)的小型水电站、燃气电站等,其具有较好的频率响应能力,可认为在满足稳态安全要求的情况下所形成的孤岛是稳定的;而对于风电场、光伏电站等间歇性电源,须综合考量控制策略的参数、电池储能系统容量和响应速度、与调度中心的通信是否完好等,仅具备足够电压、频率调节能力的电源才具有作为孤岛主要电源的潜力。因此,本文所提的孤岛划分模型中,可作为配电孤岛电源(即潜在根节点rs)的模型仅包括小型水电站、燃气电站以及具备电压和频率调节能力的风电场和光伏电站。电池储能系统主要作为一种快速调节功率的手段以平衡间歇性电源的波动。其中,潜在根节点rs的数量即所提模型可得到配电孤岛的最大数量。
孤岛划分后全ADN 节点及线路状态可表示为:
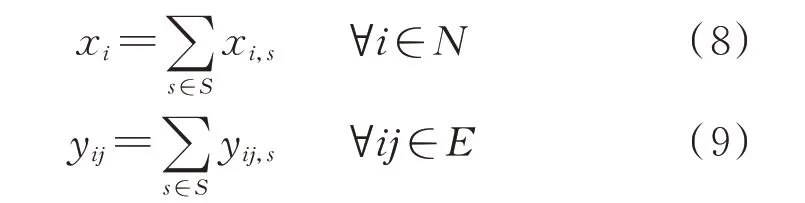
式中:xi和yij分别为整个ADN 中节点i与线路ij的状态,取值为1 表示投运、取值为0 表示断开。
1.2 ADN 的自主运行模型
对于极端事件中与主网断开连接的配电区域,故障可能发生在多重区域(配电系统或上级电网),其检修时间具有随机性,难以精确确定配电孤岛需自主运行的时间[10]。假设总调度时长固定且同时优化所有调度时段的模型得到的自主运行方案未必符合实际。由于DG 出力的短期预测精度远高于长期预测,采用短期预测的DG 出力可降低调度的不确定性。因此,本文采用滚动优化的方法逐步地确定每个调度时段的配电孤岛运行方案。调度时段的实际时长可根据实际情况制定,一般取15 min。相邻调度时段的运行策略需要衔接和配合,第t个调度时段的调度方案通过求解时段Tt={t,t+1,…,t+Tl}内的联合优化模型得到,其中Tl为滚动优化的步长,即优化模型针对的调度时段数量。
下面描述第t个调度时段的配电孤岛自主运行模型。
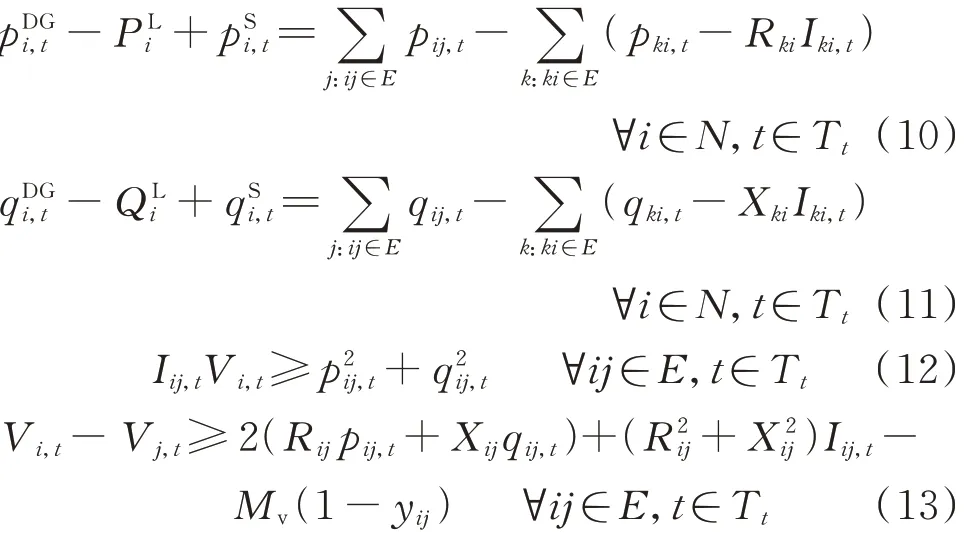
由2.1 节孤岛划分模型确定的配电孤岛拓扑是辐射状的,可基于支路潮流模型(branch flow model,BFM)建立二阶锥松弛形式的配电系统潮流模型[25],如式(10)至式(14)所示。

在滚动优化求解中,求解第t个调度时段的优化模型可得到Tt中每个调度时段的变量值,但只根据这一结果制定第t个调度时段的配电孤岛运行方案,而第t+1 个调度时段的运行方案需由第t+1 个调度时段的优化模型求解得到。例如,求解第1 个调度时段的优化模型可得到T1上每个调度时段的DG 出 力 调 度 值,…,,但 只 有作 为调度值下发给第i个DG,作为第1 个调度时段的运行方案。尽管T1上的求解结果中也包含,但此值并不作为第2 个调度时段的调度值,第2 个调度时段的运行方案由求解T2上的优化模型得到。
此外,每个配电孤岛还需满足安全约束,即线路潮流和节点电压幅值不能越限,如式(15)和式(16)所示。
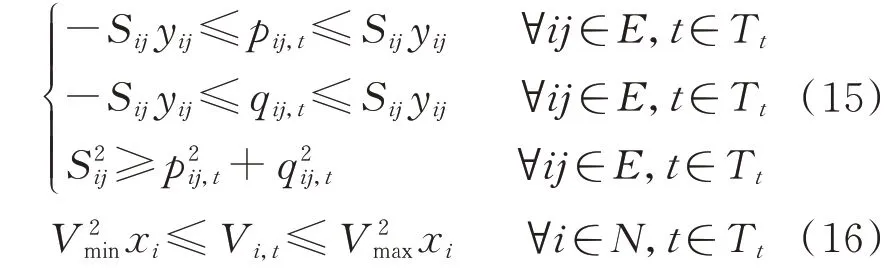
式中:Sij为线路ij容许流过的最大视在功率,可由线路的热稳定、动态稳定条件与绝缘水平确定;Vmin为容许的最小节点电压幅值。式(15)约束了线路潮流不能超过其最大允许功率,采用二阶锥的形式表达;式(16)表示在正常运行时节点电压幅值须在给定范围内,由于BFM 中的电压变量Vi,t为幅值的平方,其上下限也须取为平方的形式。
随着未来智能开关的配置与需求侧管理技术的推进,ADN 中的负荷可被建模为连续变量[26-27]。切负荷模型可表示为式(17)至式(19)所示的约束。

式中:λi,t为调度时段t中的切负荷功率关系系数,其值可根据负荷功率因数计算得到,表示切除有功功率和无功功率的比例系数;βd和βu分别为表征相邻调度时段的负荷投运与切除的调节系数。式(17)表示切负荷的有功功率范围;式(18)表示若在调度时段t中 切 除 节 点i上的 有 功 负 荷,则 相 应 切 除λi,t的 无 功 负 荷,切 负 荷 功 率 关 系 系 数λi,t可 根 据调度时段t中的负荷功率因数计算得到;为避免对负荷的频繁投切,式(19)约束了相邻调度时段间负荷投切的上下限。
ADN 中的DG 包括小型水电站、燃气电站、电池储能系统、风电场、光伏电站等。本文分别建立了上述DG 的出力模型,并将其分为如下3 类。
1)小型水电站与燃气电站。相比于传统火电机组,这类电源的爬坡速率较快,可快速调节有功出力,其出力调节范围与速度分别如式(20)和式(21)所示。式(20)表示小型水电站与燃气电站的有功与无功功率不能超过允许的上下限;式(21)表示相邻调度时段间小型水电站与燃气电站的有功与无功功率调节范围应在爬坡速率所能达到的范围内。
式中:Nht和Ngt分别为水力发电机与燃气发电机节点的集合;、和、分别为小型水电站或燃气电站中发电机g的有功出力和无功出力的最小值、最大值和分别为发电机g的有功和无功爬坡速率;ΔT为每个调度时段的实际时长。
2)电池储能系统。其须满足充放电功率约束与荷电状态(state of charge,SOC)约束。充放电有功和无功功率约束如式(22)所示,其约束了电池储能系统充电与放电功率的上下限。基于此,可得到其对外输出功率的表达式(如式(22)中前2 个约束所示),取正值表示电池储能系统处于放电状态,向外输出功率,负值则表示处于充电状态。
式 中:Ness为ADN 中 电 池 储 能 系 统 的 集 合;和分别为储能系 统g的放电、充电有功和无功 功 率;和分 别 为 表 征 储 能 系 统g的 放 电 与充电状态的0-1 变量,其值取1 分别表示储能系统g在调度时段t处于放电与充电状态,这两个变量为互斥变量,即同一调度时段t内仅能有一者取1;和分别为储能系统g的最小与最大充、放电有功和无功功率。
SOC 上下限约束如式(23)所示,包括相邻调度时段间储能系统能量的表达式,并约束了所储存能量须保持在允许的范围内。

式(24)表示调度时段开始和结束时刻储能系统储存的能量相同,用于以调度时段为单位平衡DG 出力的波动性。

3)风电场与光伏电站。在风电场与光伏电站内配置相应容量的储能系统是一种平衡出力波动、提高电压和频率调节能力的有效方法[20]。考虑风电场与光伏电站内部的储能系统,本文建立了如式(25)和式(26)所示的风电场与光伏电站出力模型。式(25)中风电场与光伏电站的有功出力表达为预测有功出力与储能系统有功功率之和;式(26)约束了风电场与光伏电站的无功出力范围,其上下限考虑电池储能系统的无功功率。


式中:Nwf和Npv分别为ADN 中风电场与光伏电站的集合;和分别为风电场与光伏电站g中的储能系统的有功和无功功率,其同样满足约束式(22)至式(24);为风电场或光伏电站g的预测有功 出 力;和分 别 为 风 电 场 或 光 伏 电 站g的最小与最大无功功率。
式(25)与式(26)构建了自主运行模型中风电场与光伏电站出力的初步约束,对不确定性的考虑将在第3 章中进一步分析。
此外,配电孤岛系统的时间常数比较小,外部扰动可能会导致电压和频率的快速变化。为保证配电孤岛电压和频率的调节能力,每个孤岛应维持一定水平的有功和无功功率备用容量,分别如式(27)和式(28)所示。
对于式(27)与式(28)中的二次项,可采用大M法 将 其 线 性 化。以xi,s为 例,可 将 其 替 换 为,并线性化如下:

式中:M为一充分大的正常数,其值可取节点i负荷的最大有功功率。
1.3 目标函数
对于不能被主网恢复的配电区域,孤岛划分的结果应按重要程度使尽可能多的负荷运行,本文以最大化正常运行的负荷量(即最小化停电损失)为目标函数。当配电系统处于故障状态时,为避免故障扩大,应以较小的网架为重要负荷供电[27]。综合考虑负荷停电损失、配电孤岛网架规模与网损,所提ADN 的孤岛划分与自主运行策略的目标函数为:

式中:wi为负荷i的权重系数,可由政府相关部门根据负荷规模、创造的经济效益、对治安和人民生活的影响等因素制定;κij为表征线路ij故障概率的权重因子,可基于故障种类及其影响范围确定[27];μ为网损项的权重。
κij与μ应取较小的值,以确保式(31)的后两项不会影响最大化运行负荷量的目标。
综上所述,本文所提ADN 孤岛划分与自主运行模型的目标函数如式(31)所示,约束条件则为式(1)至式(30),决策变量包括孤岛网架变量(xi,s、yij,s、xi、yi)j、潮 流 变 量(、pij,t、qij,t、Iij,t、Vi,)t和 电 池 储 能 系 统 状 态 变 量()。
2 计及预测误差的间歇性电源有功出力控制策略
由于风能与太阳能的固有不确定性,风电场与光伏电站的出力也是不确定的,在确定配电孤岛运行策略时需要对此适当考虑。本文提出了一种计及预测误差的间歇性电源有功出力控制策略,以得到鲁棒的配电孤岛自主运行策略。对任意风电场或光伏电站g,控制策略的目标函数为:


式中:e为惩罚函数E(·)的阈值。
用 辅 助 变 量ξg,t替 换 式(32)中 的 目 标 函 数E(),并 引 入 中 间 变 量γg,t,所 提 计 及 预 测误差的间歇性电源有功出力控制模型可用式(34)与式(35)的线性模型表示:
式(35)中风电场或光伏电站g的实际有功出力可表示为:

本章所提的计及预测误差的间歇性电源有功出力控制策略旨在确保自主运行策略得到的风电厂与光伏电站的有功出力调度值在考虑预测误差时的可行性。因此,可分为以下2 种情况讨论。
1)负预测误差最小。此时预测误差为负值,取最小值表示风电场或光伏电站的实际有功出力比预测值小,且偏差最大,风电场或光伏电站的实际出力如式(37)所示。

在这种情况下,风电场或光伏电站g的有功出力Ep1的控制模型为:

2)正预测误差最大。此时预测误差为正值,取最大值表示风电场或光伏电站的实际有功出力比预测值大,且偏差最大,风电场或光伏电站的实际出力如式(39)所示。

在此种情况下,风电场或光伏电站g的有功出力Ep2的控制模型为:

若求解式(38)与式(40)所示的最小与最大预测误差情况下的有功出力控制模型后目标函数值与均为0,则说明在此两种最坏情形下通过调节储能系统的充放电状态及功率可抵消预测误差带来的影响,此时原自主运行策略的调度方案可行。若Êp1>0,可将式(41)所描述的约束添加至自主运行模型中,以避免预测出力偏高导致自主运行策略失效;式(41)用于修正由储能系统的最大放电功率与最低储存能量限制导致自主运行策略失效的情况。若>0,则将式(42)所示的约束添加至自主运行模型中,以避免预测出力偏低导致自主运行策略失效;式(42)用于修正储能系统的最大充电功率与最高储存能量限制导致自主运行策略失效的情况。
本文所提ADN 灵活孤岛划分与实时调度策略的求解流程如图1 所示。由于存在预测误差,在求解ADN 孤岛划分与自主运行模型后,需验证每个风电场与光伏电站的有功出力是否可行;若不可行(控制标志为0),则生成对应的约束并添加至自主运行模型中,并重新求解自主运行模型,直到得到的自主运行策略在计及风光出力预测误差时都是可行的。
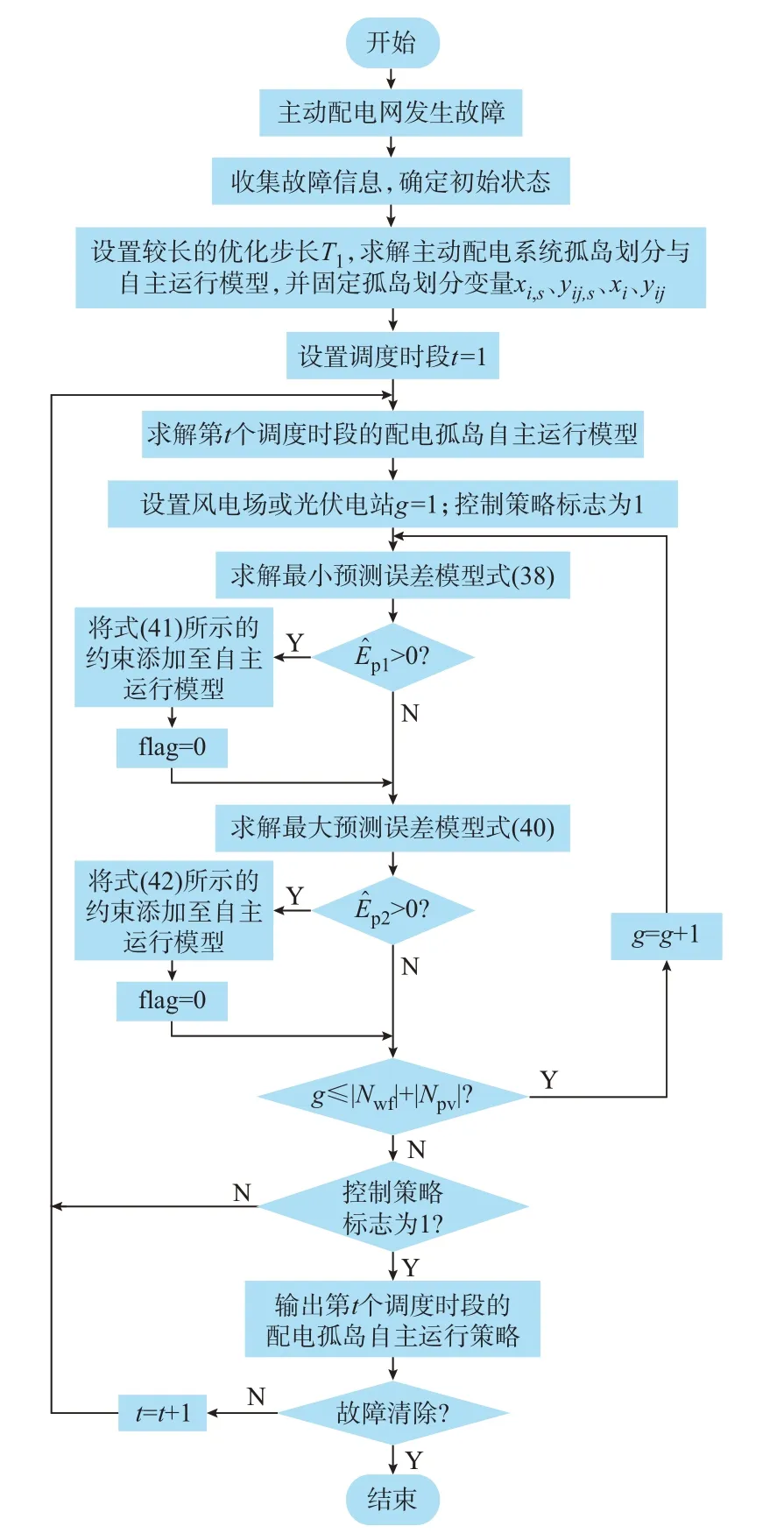
图1 ADN 灵活孤岛划分与实时调度策略的求解流程图Fig.1 Flow chart of solution for flexible islanding partition and real-time scheduling strategy in ADN
本文采用滚动优化方法,利用间歇性电源的误差较小的短期预测(如1~2 h)出力,实时更新间歇性电源的短期预测值对每个调度时段的优化问题进行求解,即对同一优化问题需反复求解。若能适当配置储能系统的容量,多数间歇性电站可按调度值出力,不会违背=0 与=0 的条件,也就无须向上层模型更新约束重新求解。将绝大部分情况下不起作用的约束提取出来建立模型并加以验证本章所提计及预测误差的间歇性电源有功出力控制策略,其可降低需要反复求解配电孤岛实时调度模型的复杂度,仅在较极端的场景下需迭代求解,有利于加快求解效率,以实现配电孤岛的实时调度更新。此外,在实际工程应用中风电场和光伏电站的出力控制一般是由部署在本地的控制器完成。调度中心根据间歇性电源出力的短期出力预测数据求解配电孤岛的自主运行策略,得到间歇性电源的出力调度值,并下发该调度值到部署在间歇性电源本地的控制器,通过有功控制策略进行验证。本章所提的间歇性电源有功出力控制策略正是基于这样的思路。
本文所提孤岛划分、自主运行与间歇性电源出力控制策略可支持严重故障发生后、恢复资源准备完毕前ADN 的持续安全运行。考虑到未来ADN中可再生能源发电资源会趋于增加,本文所提方法可与本地运行控制器相配合,共同实现ADN 故障后的孤岛划分与优化调度运行。本文所提模型基于集中控制策略,但其部分功能的具体实现可由本地运行控制器完成:
1)在制定故障后的ADN 孤岛划分策略时,需要获取ADN 的全局信息以求取最优解,由于分布式的运行控制器缺乏对控制区域外的信息感知能力,此步骤可在调控中心求解完成。此时,调控中心基于收集的ADN 信息(包括故障范围、开关状态、DG 出力与负荷需求等)求解所提孤岛划分模型,得到每个孤岛的范围与边界,并据此选定每个配电孤岛内部的运行控制器。
2)采用滚动优化方法,每个调度时段的优化模型规模较小,计算负担较轻。若本地控制器具备足够计算能力,配电孤岛的自主运行模型可在本地控制器就地求解,实时确定每个调度时段的调度策略。若本地控制器的计算能力有限或需优先实现其他控制功能,配电孤岛的自主运行模型也可由调度中心求解后下发给本地控制器,此时需要完善的通信系统支撑。
3)对于间歇性电源的出力控制功能,其对计算能力的要求极低,可将其部署于本地控制器,在获得间歇性电源的出力调度方案后,由本地控制器验证该调度方案是否能容忍预设的预测误差水平,否则返回验证信息至上层模型(可位于本地控制器或ADN 调控中心)。
3 算例与结果
本章采用配置了DG 的改进的IEEE 33 节点标准配电系统验证本文所提ADN 灵活孤岛划分与实时调度策略的可行性与有效性,IEEE 33 节点标准配电系统如图2 所示。假设配电系统处于极端故障情况:上游变电站出口断路器跳闸,配电系统与上级电网的连接断开,同时线路9-10 与26-27 发生故障。给定下述参量:容许的最小与最大电压幅值分别为0.9 p.u.和1.1 p.u.;一级(重要)、二级与三级负荷的权重分别取1.0、0.5 与0.1;负荷按故障前的功率因数投切;相邻调度时段的负荷投运与切除的调节系数βd与βu分别为-20%与20%;小型水电站与燃气电站的爬坡速率按其每小时额定功率整定;配电孤岛的有功容量备用率为15%;间歇性DG 的出力预测误差最大为±15%;每个调度时段的时长为15 min;滚动优化步长为2 h。
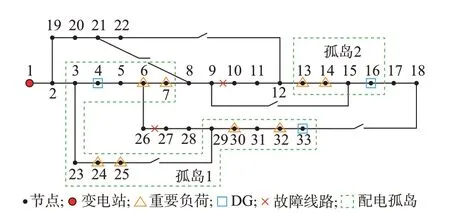
图2 含DG 的IEEE 33 节点配电系统Fig.2 IEEE 33-bus distribution system with DG
IEEE 33 节点配电系统的负荷分级详见文献[28],DG 的参数如表1 所示,风电场与光伏电站内的储能系统的参数如表2 所示。风电场和光伏电站的出力曲线采用Renewables.ninja 平台2019 年1 月的历史数据[29-30],并进行归一化处理得到表2 中风电场、光伏电站的出力值。 其余参数详见MATPOWER 7.0[31]。仿真平台为Intel Core i5 6 核处理器(2.8 GHz)、8 GB 内存的Windows 10 计算机,编程环境为MATLAB/YALMIP,采用商业求解器CPLEX 12.6 求解。
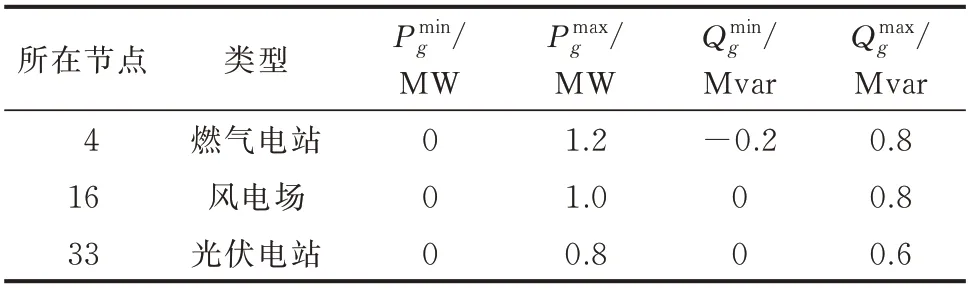
表1 DG 参数Table 1 Parameters of DGs
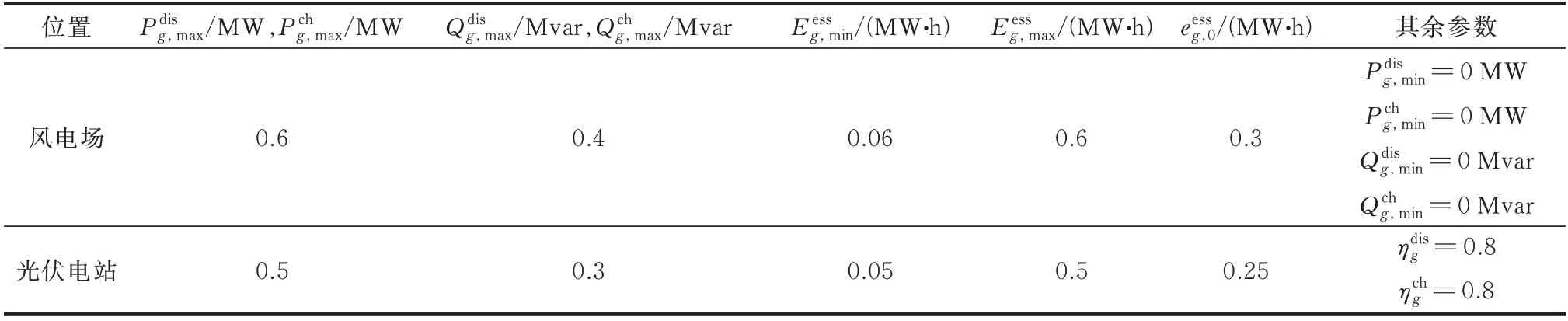
表2 配合风电场和光伏电站建设的电池储能系统参数Table 2 Parameters of battery energy storage system for construction of wind farm and photovoltaic power station
以某时段风电场和光伏电站的出力数据为例,求解所提ADN 孤岛划分与实时自主运行模型,得到的2 个配电孤岛如图2 中的绿色虚线框所示。所有的DG 和重要负荷均被划分至2 个配电孤岛中,孤岛1 以燃气电站和光伏电站作为电源,包含6 个重要负荷;孤岛2 以风电场作为电源,包含2 个重要负荷。所提自主运行策略无须预先给定总调度时长,可实时更新每个调度时段的运行策略,但为便于比较,下面选取其中3 h 进行分析。2 个配电孤岛的DG 有功出力与恢复负荷有功功率随时间的变化如图3 所示。
所提的ADN 孤岛划分与自主运行策略可有效利用储能系统平衡DG 的出力波动。由图3 可看出,在配电孤岛1 中,光伏机组有功出力的波动最大为352.1 kW,而负荷波动的最大值为228.0 kW,比光伏机组出力波动降低了35.2%;在配电孤岛2 中,风电机组有功出力的波动最大为511.2 kW,而负荷波动的最大值为69.1 kW,仅为风电机组出力波动的13.5%。
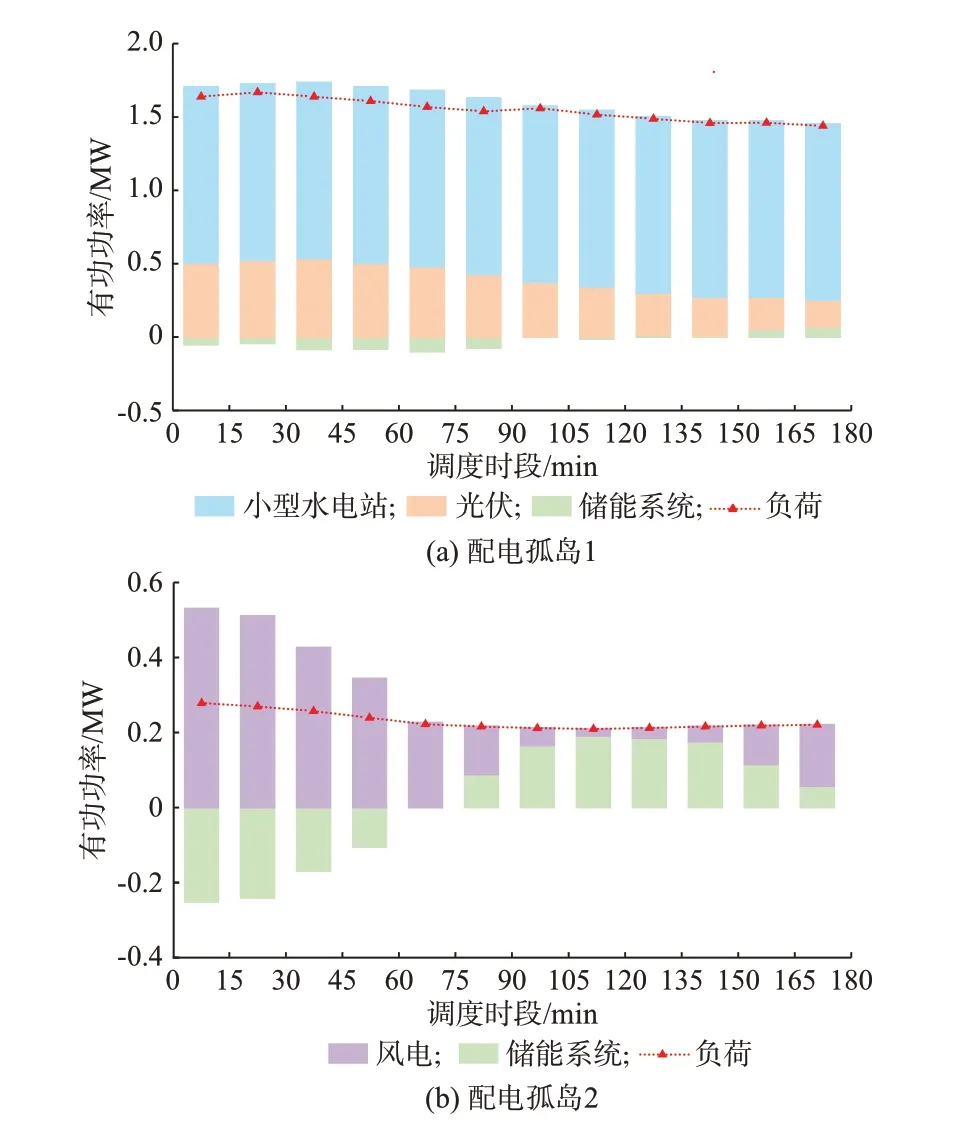
图3 配电孤岛内DG 与负荷有功功率变化Fig.3 Variation of active power of DGs and loads in distribution island
为进一步说明所提ADN 灵活孤岛划分与自主运行模型平衡间歇性电源出力波动的效果,基于Renewables.ninja 平台2019 年1 月的风电与光伏连续出力数据,随机选取了其中3 h 的数据,得到所对应的优化模型,重复此过程100 次,得到如图4 所示结果。图4 以容量较大的风电场(位于节点16)为例,对比了优化时段内风电场有功出力的最大偏差与其所属孤岛的最大负荷有功波动。图4 中阴影部分为每次仿真中风电场的最大有功出力波动与风电所属配电孤岛的最大负荷有功功率波动的差值。可见,在同一配电孤岛中,负荷有功功率的波动远比风电场的有功出力波动小,平均仅为22.23%。其中,负荷波动在风电场出力波动10%以内的场景数占比为32%,而低于20% 的场景数占比超过50%。因此,所提ADN 孤岛划分与自主运行策略可有效利用储能系统平衡DG 的出力波动。
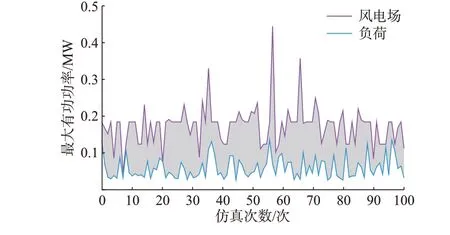
图4 配电孤岛内风电场与总负荷的有功功率最大偏差Fig.4 Maximum active power deviation of wind farm and total loads in distribution island
以图2 所示孤岛划分方案中的配电孤岛2 为例,用高斯分布模拟风电出力的预测误差[32],并采用蒙特卡洛抽样得到风电有功出力的预测值,如图5 所示。基于此预测值求解所提计及预测误差的DG 有功出力控制策略,得到风电场有功出力的调度值。尽管风电的真实有功出力与预测值有所不同,通过调节风电场内部储能系统的有功出力,依旧可使风电场的实际有功出力与提前制定的调度值一致。从图5 中的柱状图可看出,所有调度时段中储能系统的能量均在所允许的最小值(0.06 MW·h)与最大值(0.60 MW·h)之间,这是因为所提间歇性电源有功出力控制策略可确保风电场出力的调度值在最小与最大预测误差的情况下都可行,即通过调节间歇性电源内部的储能系统出力,在考虑预测误差时间歇性电源有功出力的实际值可与调度值一致。图5 仅验证了一种预测误差的情况,实际上,只要预测误差在预设的范围(±15%)内,所得到的间歇性电源调度方案总是可行的。且本文采用滚动优化的方案,在制定第t个调度时段的自主运行策略时,仅需考虑相邻Tl个调度时段(本算例为2 h)内的间歇性电源预测出力,避免了因长期预测误差太大而使调度结果过于保守。
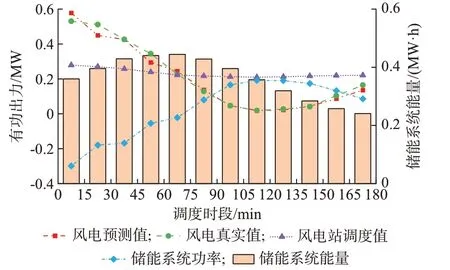
图5 计及间歇性电源有功出力预测误差的控制策略性能Fig.5 Performance of control strategy considering forecasting error of intermittent power supply active output
为验证所提ADN 灵活孤岛划分与实时调度策略的求解效率与在线运行性能,进行了以下两个方面的仿真与比较:
1)比较本文所提基于环路消除辐射状约束的孤岛划分模型与基于虚拟潮流辐射状约束的孤岛划分模型[13]的平均求解时间。采用IEEE 33、85、123 与141 节点标准配电系统进行测试。通过随机生成DG 与重要负荷的数量及位置,并添加数量不同的联络线,为每个测试系统生成200 个场景,得到的平均求解时间如表3 所示。在4 个测试系统中,相比于文献[13]的方法,求解本文基于环路消除辐射状约束的孤岛划分模型所需的时间分别减少了5.2%、39.3%、18.4%与9.7%。可见,相比于基于虚拟潮流辐射状约束的孤岛划分模型,所提的基于环路消除辐射状约束的ADN 孤岛划分模型的求解效率更高,有利于实现ADN 故障后的快速孤岛划分。
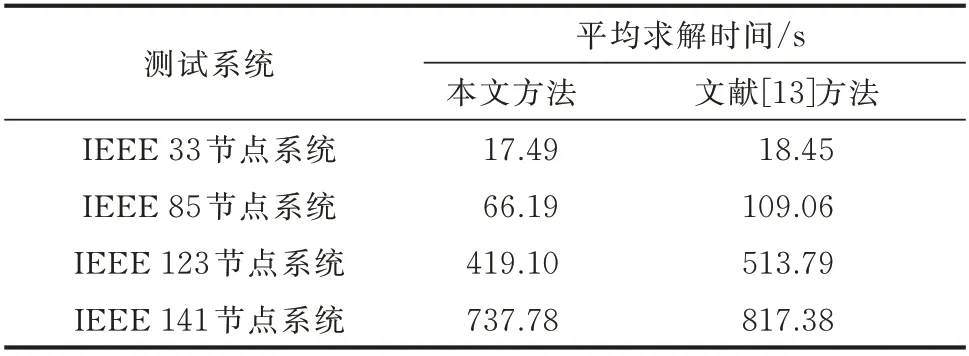
表3 不同模型的平均求解时间对比Table 3 Comparison of average solving time for different models
2)比较本文所提基于滚动优化、逐步更新的配电孤岛自主运行与同时优化给定总调度时长的配电孤岛自主运行策略[10]的平均求解时间。表4 列出了IEEE 33 节点配电系统中上述两种配电孤岛自主运行模型的求解时间对比。如表4 所示,由于本文采用滚动优化方法,每个调度时段的平均求解时间主要受滚动优化步长Tl影响,而与总调度时长无关,每个调度时段的平均求解时间都低于或接近1 s,这对于分钟级的调度而言可以忽略不计。而采用文献[10]中同时优化给定总调度时长的自主运行策略,尽管其优化模型的规模随总调度时长呈线性增长,但所需的求解时间有可能随之呈指数增加。例如,采用该方法求解总调度时长为8 h 的IEEE 33 节点配电系统的自主运行策略大约需要6 min,若发生紧急事件则需重新求解运行策略,这类方法可能由于求解时间太长而无法应用。
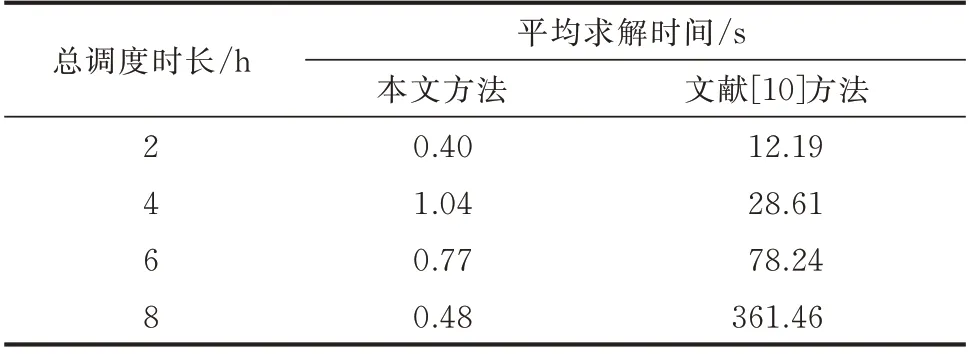
表4 配电孤岛不同自主运行策略的平均求解时间对比Table 4 Comparison of average solving time with different autonomous operation strategy in distribution island
4 结语
针对极端故障发生后无法利用主网恢复的配电区域,本文基于环路消除辐射状约束建立孤岛划分模型,采用滚动优化方法在线求解每个调度时段的孤岛运行方案,并提出了间歇性电源的有功出力控制策略,以确保所制定的自主运行策略的可行性。算例结果表明,本文方法能有效降低间歇性电源的出力波动对负荷的影响,可在一定范围内耐受风光出力预测误差。此外,本文所提基于环路消除辐射状约束的ADN 孤岛划分模型的求解效率较高(相比于基于虚拟潮流辐射状约束的模型提高了5%~30%),采用滚动优化方法实时更新配电孤岛的运行策略,每个调度时段的平均求解时间基本都低于1 s,有利于ADN 在线恢复决策。
