一种小幅度步距相移干涉算法的相移误差分析
2022-11-26陈柔婧韩森康岩辉徐春凤李雪园
陈柔婧,韩森,,康岩辉,徐春凤,李雪园
(1 上海理工大学 光电信息与计算机工程学院,上海 200093)(2 中国计量科学研究院,北京 100029)(3 苏州慧利仪器有限责任公司,江苏 苏州 215123)
0 引言
在光学计量中,相移干涉术被用于测量光学元件表面微观形貌以及波前相位,是测量精度最高的方法之一[1]。相移干涉仪常常将压电陶瓷(Piezoelectric Ceramic,PZT)作为移相器,驱动参考臂移动,产生相移步长,同时,由光电探测器采集干涉光强信号,进一步传输到计算机对信号进行处理,得到波前相位,还原光学元件表面微观形貌。然而,环境中的随机振动不仅会影响相移过程中干涉图对比度变化,影响干涉条纹图采样,造成条纹模糊[2],还会使得相移量偏离设定值,大大降低测量精度甚至无法测量。
为了提高对环境的抗干扰能力,WANG Zhaoyang等[3]提出一种基于最小二乘原理的新型迭代法。该算法只需3幅以上干涉条纹图,通过在同一幅图的各像素点上迭代求解相位分布,某一像素点上对应的各干涉条纹图之间迭代求解相移量,突破对各像素点相移量的限制,允许采样干涉图序列之间相移量完全随机。该算法可实现快速收敛,并能精确提取相位,但在计算过程中对背景强度和对比度有一定要求,且大量迭代过程会降低相位提取速度。JESUS M M等[4]提出用傅里叶分析方法,从大幅度振动下得到的干涉图中复原波前相位分布,该方法对干涉图进行了归一化操作,不要求背景强度对比度恒定,但是仍难以确定随机振动下的相位符号。LIU Qian等[5]利用振动引入空间载波,计算并分析空间载波干涉图频谱,从中求解由随机振动引起的相移量和对比度信息,再通过最小二乘法补偿对比度变化并提取相位,减少了由对比度变化引起的相位还原误差。LU Wenqian等[6]提出先将干涉条纹图进行傅里叶变换,进而在频域中采用频域细分操作对峰值坐标进行亚像素精度定位,从而求解出振动倾斜平面,再用最小二乘法求解波前相位。该方法在振动环境下还原波前相位时精度较高,适用于干涉条纹数量大于三根的情况。这些方法大多利用随机振动作为相移量,或固定相移步长[7]为90°时分析随机相移误差对还原波前相位产生的影响。
考虑到在进行如5°、10°、20°极小相移步长的5步相移时,相对于90°行程大大缩短,可忽略压电陶瓷移相曲线中迟滞和非线性效应,PZT相移曲线近似为直线,相移器精度更高。同时,由相移干涉测量中的振动仿真[8]可知,振动频率在CCD采样频率的一半的附近,5步Hariharan算法相位还原均方根(Root Mean Square,RMS)误差较大。而当采用极小步长进行5步相移,所用相移时间大大降低,采样频率相对变快,意味着其敏感振动频率增大,而实际环境中的主要振动即为低频振动部分[9]。因此,提出用小相移步长代替常用90°进行5步相移。基于ESTRADA J C提出的自调谐相移干涉法[10]中使用3步法还原实际相移步长的步骤,提出在利用5步Hariharan相位求解公式前用该步骤还原相移步长。仿真研究在5°、10°、20°相移步长时,对标定误差、随机相移误差的相位复原峰谷(Peak Valley,PV)、RMS误差响应,并与经典5步Hariharan[11]算法对比。
1 算法原理
根据相移干涉理论[12],干涉条纹图中任意像素点位置(x,y)的光强可表示为

式中,a(x,y)为背景光强,b(x,y)为干涉条纹调制幅度,φ(x,y)表示待求解波前相位;ω0为时域载波角频率,为便于书写,每帧干涉条纹图之间的相移步长为180°×ωπ,以角度单位描述;t为干涉条纹图离散采样时刻,是一个整数。为简化书写,下文省略位置坐标(x,y)。
从系统的角度分析,将相移算法看作一个正交滤波器,因算法的时域角频率ω0自由可调,称其为可调谐算法。若要求得干涉条纹图中的波前相位,滤波器系统须在频域中满足H(0)=0,H(ω0)=0,而H(-ω0)≠0[13]。
系统函数为

式中,i为虚数单位。对该系统函数做傅里叶变换,得到系统频率响应

显然,满足上述频域特点。利用系统卷积理论[14]可求解波前相位分布为

式中,Im表示取虚部,Re取实部,*为卷积运算符。式(4)即经典的3步相移法公式。
自调谐算法取5步相移,首先对{I-1,I0,I1}、{I0,I1,I2}分别利用式(4)进行处理,当存在相移标定误差Δ,即实际时域角频率ω′=ω0±Δ,求得相位φ′与真实相位φ存在误差为

式中,ε0、ε1为标定误差下对应的相位误差。文献[15]在频域中推导了相位还原误差与频率失调误差的关系式,并得出相位还原误差为2倍待测相位空间分布的正弦函数关系这一重要结论,且H(ω0+Δ)趋于0时,误差越小,因此,有

由式(5)~(8)可得

对式(9)在像素空间M×N上取平均值,当相位分布满足完整条纹空间时即可消除误差正弦项。而在实际测量过程中,此条件较容易满足。因此可计算得到与实际相移频率高度近似的频率ω̂,即

因式(4)得到的是包裹相位,W[]同为包裹运算。采用自调谐算法中的步骤,进一步将ω̂代入5步Hariharan算法公式(11),当ω̂越接近于实际相移时,意味着频率失调误差越小,H(ω0+Δ)越接近0,因此,相比直接使用理想相移ω0计算,相位还原误差更低。

当在5步相移过程中存在一组正负随机误差Δ′={Δ-2,Δ-1,Δ1,Δ2}时,5幅干涉条纹图光强分别表示为

为完全利用干涉条纹序列信息,对干涉条纹序列{I-1,I0,I1}、{I0,I1,I2}、{I-2,I-1,I0}分别用3步法计算得到

式中,ω′1=ω0±Δ1,ω′-1=ω0±Δ-1。此时,ε′为随机相移误差下的相位误差。图1所示是标定误差下产生的相位误差,即2倍相位空间分布的正弦函数sin(2φ(x))。从数值仿真结果来看,随机相移误差下相位误差ε′依然是2倍相位的正弦函数,但相对标定误差,存在一定相位平移,同时整个函数产生上下平移,幅度与随机相移误差有关,如图2所示。

图1 正弦相位误差函数sin(2φ(x))Fig.1 The sinusoidal phase error function sin(2φ(x))

图2 随机相移误差下相位误差ε0΄Fig.2 The phase error ε0΄at random phase shift error
式(17)、(18)、(19)两两相减,得

通过计算空间平均以尽可能消除误差函数,即
最后,将得到的相移频率取平均值,并代入式(11)还原波前相位,得

2 数值仿真
2.1 标定误差仿真分析
为检验该自调谐算法的有效性和相位还原精度,进行了数值仿真分析。根据式(1)生成5幅干涉条纹图,假定干涉条纹图上各像素点处背景强度与调制度分别为a=125exp[2.5×10-4(x2+y2)],b=125exp[2.5×10-4(x2+y2)],待测波前相位为φ(x,y)=4π×(x M+y N),其中干涉图像素大小M×N,M=N=1024。按Δω0百分比确定标定误差幅度,在20°相移步长下,取±10%即对应正负2°标定误差,并以每0.2°增加误差。分别采用上述自调谐和Hariharan算法计算包裹波前相位,通过解包裹运算获得连续包裹相位,最后进行泽尼克曲面拟合得到还原波前相位φ̂。计算对应误差下相位还原误差Δφ,进一步转换为相位面形高度误差Δh的PV、RMS值以反映算法的相位还原精度,其中PV值表示此相位误差最高与最低值之间的差值,RMS则表示此相位误差的均方根值。PV、RMS值的计算过程为(n为像素点个数)

图3为无相移误差时5帧干涉条纹图。在自调谐算法计算过程中,得到相移步长ω̂与实际相移步长ω′的差值ωE


图320°相移步长干涉图Fig.3 Interferograms at phase shift 20°
图4 为自调谐算法在±10%标定误差下对实际相移步长的还原误差。可以看出,当标定误差增大,相移步长还原误差ωE逐渐增大,但由于待测波前相位为完整条纹空间分布,通过两次由3步法得到的包裹相位相减并进行空间平均运算就能消除2倍相位的正弦误差,从而高精度还原相移步长。由仿真结果可知,在±10%标定误差内,其还原精度高于6×10-5rad,可见该算法能高精度求解出实际相移步长。图5、6分别为自调谐、Hariharan算法相位还原误差(PV、RMS)曲线。可知,当相移步长还原误差ωE增大,相位还原误差PV、RMS值也随之增大,即相位还原精度降低。自调谐算法相位还原误差PV、RMS最大分别为7.1×10-6λ、2.2×10-6λ。Hariharan算法对应误差PV、RMS分别为0.004λ、0.001λ。因此在相同标定误差下,与Hariharan算法相比,自调谐算法极大地提高了相位还原精度,意味着其能容许更宽标定误差范围。在进行小相移时,若存在较大的标定误差,也能保证较高还原精度。

图4 ±10%标定误差下自调谐算法相移步长还原误差Fig.4 The phase shift step retrieval error by self-tuning algorithm within±10% calibration error

图5 ±10%标定误差下自调谐算法相位还原误差Fig.5 The phase retrieval error by self-tuning algorithm within±10% calibration error

图6 ±10%标定误差下Hariharan算法相位还原误差Fig.6 The phase retrieval error by Hariharan algorithm within±10% calibration error
取更小相移步长5°、10°,在相同标定误差下,自调谐算法计算得到的相移步长与实际相移步长之间的误差如图7所示,相位还原误差如图8所示。从图7中可以看出,相移步长越小,相移步长还原误差越小,即与实际相移步长更为接近,但从数值看来,误差都在10-5rad量级,变化较小,难以提高后续使用5步法时相位还原精度。正如图8所示,减小相移步长,相位还原误差PV、RMS值均在10-6λ量级波动,因此自调谐算法还原精度无明显变化。而对应采用5步Hariharan算法,仿真结果表明,与20°相移步长相比,更小相移步长下,该算法相位还原误差也无明显变化,如图9所示。

图7 相同标定误差下更小相移步长自调谐法相移步长还原误差Fig.7 The phase shift step retrieval error by self-tuning algorithm at smaller phase shift steps with same calibration error
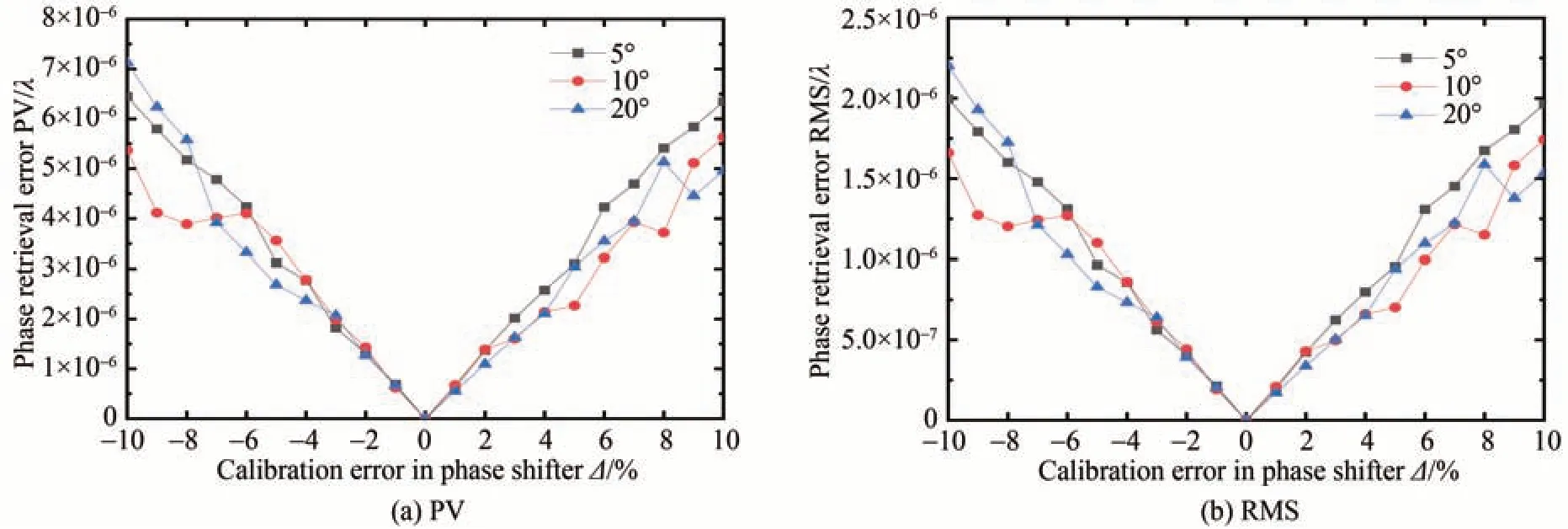
图8 相同标定误差下更小相移步长自调谐算法相位还原误差Fig.8 The phase retrieval error by self-tuning algorithm at smaller phase shift steps with same calibration error

图9 相同标定误差下更小相移步长Hariharan算法相位还原误差Fig.9 The phase retrieval error by Hariharan algorithm at smaller phase shift steps with same calibration error
2.2 随机相移误差仿真分析
与上述仿真相同背景条件,首先取相移步长20°,在随机相移误差幅度|Δ′ω0|为1%~5%时,对应每一误差幅度各模拟20组随机误差,对每一组按式(12)~(16)模拟生成一个5幅干涉条纹图序列,分别用自调谐算法与Hariharan算法计算相位还原误差PV、RMS值,再对20组误差PV、RMS取平均值以检验两种算法的相位还原精度。
因在相移标定误差情况下,5幅干涉图中包含的误差相同,自调谐算法用其中4幅干涉条纹图即可以非常高的精度还原实际相移步长。将该步骤扩展,在各干涉图中相移误差不等时,对干涉图多次用3步法计算得到的相位进行重叠平均计算,以完全利用干涉条纹序列信息求解相移步长,再将该相移步长代入5步Hariharan法公式还原波前相位。但此时,由两相位误差函数相减合成的正弦函数通过空间平均运算时不能被完全消除,因此计算得到的相移步长与中间两个随机相移值ω′-1、ω′1的平均值之间存在一定误差。表1所示为5组随机相移误差与对应的仿真计算结果。从表中可以看出,当自调谐算法计算得到相移步长接近该平均值时,与Hariharan算法还原精度基本一致。

表1 随机相移误差及对应仿真计算结果Table 1 Random phase shift errors and simulation results
图10、图11分别为5%误差幅度以内自调谐算法、Hariharan算法的相位还原误差响应曲线。从图10、11中可以看出,随着相移误差增大,相位误差PV、RMS平均值逐渐增大,自调谐算法对应PV在0.0018λ~0.0097λ、RMS在0.0006λ~0.004λ范 围,Hariharan对 应PV在0.0005λ~0.0029λ、RMS在0.0002λ~0.0014λ范围。尽管两种算法计算结果相差3倍左右,但该自调谐算法仍能保证较高还原精度。图12为相位空间分布中某一行像素上各点对应的相位还原误差。由图12可知,相位还原误差与实际相位空间分布存在正弦函数关系,幅度与随机相移误差有关。由于为小相移,可考虑进一步采集干涉条纹图以使用重叠平均法尽可能消除正弦相位误差从而提高相位还原精度[16]。
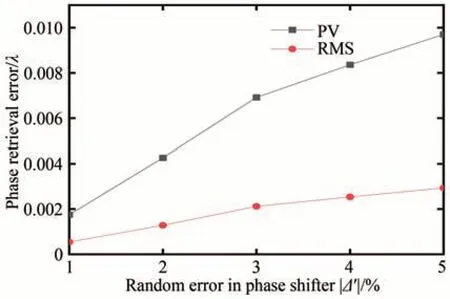
图10 5%随机相移误差内自调谐算法相位还原误差Fig.10 The phase retrieval error by self-tuning algorithm within 5% random phase shift error

图11 5%随机相移误差内Hariharan算法相位还原误差Fig.11 The phase retrieval error by Hariharan algorithm within 5% random phase shift error

图12 某一行像素上自调谐法相位误差Fig.12 The phase error by self-tuning algorithm on a specific row of pixels
取更小相移步长5°、10°,在相同幅度随机相移误差下,用两种算法还原相位,得到相位还原误差分别如图13、14所示。图13为自调谐算法计算结果,图14为Hariharan算法结果。由图13、14可知,减小相移步长,两种算法的还原精度均降低。当相移步长为5°,随机误差幅度为5%时,自调谐算法PV接近0.06λ,RMS接近0.018λ,取λ=632.8nm,此时难以保证相位还原精度。而对应Hariharan算法相位还原精度更高,其PV接近0.016λ,RMS接近0.006λ。因此,随机相移误差下,若采用自调谐算法,取20°小幅度相移步长是更佳的选择。

图13 相同随机误差,更小相移步长自调谐算法相位还原误差Fig.13 The phase retrieval error by self-tuning algorithm at smaller phase shift steps with same random error
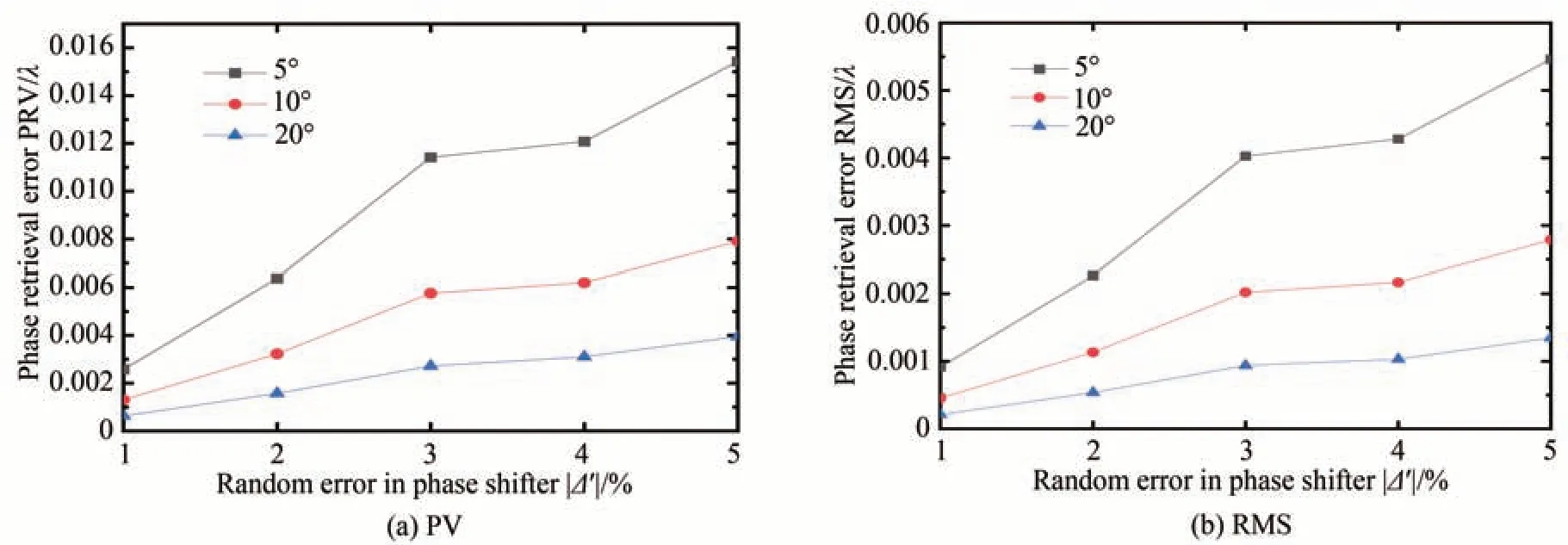
图14 相同随机误差,更小相移步长Hariharan算法相位还原误差Fig.14 The phase retrieval error by Hariharan algorithm at smaller phase shift steps with same random error
3 结论
本文提出采用极小的相移步长以提高相移精度,并减小相移过程中引入的振动,同时,在小相移步长5°、10°、20°时,仿真对比了一种自调谐算法和经典Hariharan法的相移误差响应。仿真结果表明,在小幅度相移步长下,对于相移标定误差,采用自调谐算法相比Hariharan算法极大地提高了相位还原精度,扩大了对标定误差的容许范围,明显地抑制了相位误差,验证了算法原理有效性。在使用Hariharan算法计算相位前,通过使用两次3步算法可以高精度还原实际相移步长,从而提高了对相移标定误差的不敏感性。在±10%标定误差内,各小相移步长下自调谐法相位误差PV均能达到10-6λ量级。在随机相移误差幅度5%范围内,随着相移步长减小,两种算法精度降低。结果表明,采取20°相移步长是更佳的选择,此时自调谐算法误差PV、RMS为0.0097λ、0.0029λ,仍能保证较高还原精度。后续可在该算法基础上进行重叠平均法数值仿真分析,同时进行实际干涉仪测量元件表面形貌实验,思考小幅度步长相移在实际实现过程中的CCD采样与校准,以验证小相移算法的抗振性能。