形态学开运算剔除激光雷达的太阳光干扰
2022-11-26杨刚毕宗杰崔子浩田兆硕
杨刚,毕宗杰,崔子浩,田兆硕
(哈尔滨工业大学(威海)船海光电装备研究所,山东 威海 264209)
0 引言
在过去的几十年中,基于距离选通主动成像系统的光学检测和测距技术得到了很大的发展[1]。闪光式激光雷达通过对激光脉冲飞行时间(Time of Flight,TOF)的精确测量来获取目标的切片图像,并通过距离选通技术有效减少后向散射对成像结果的影响[2],具有在恶劣环境中工作的能力。因此,闪光式激光雷达被广泛应用于目标识别[3]、人脸识别[4]、三维(Three-dimensional,3D)建模[5-6]、水下探测[7-9]、水下定位[10]等领域。但是,在闪光式激光雷达日间测量中,由于照射在目标上的太阳光和目标周围反射的太阳光在后向散射噪声中占主导地位[11],而太阳辐射在宽波长范围内有巨大的能量[12],当激光雷达探测器接收这些太阳光时,会使得目标回波信号与太阳光混杂在一起,即使采用距离选通技术也无法避免太阳光对雷达接收到的强度图像的影响。进而使闪光式激光雷达无法在白天获取目标距离信息,严重限制了其在白天的应用。
为了解决白天太阳光对闪光式激光成像雷达的影响,一般采用窄带宽、高带外抑制的光学滤波器件[13]。近年来,康翔宇等人通过窄带滤波系统对激光雷接收系统进行优化,提高了激光雷达回波信号的信噪比[14]。WANG Jun等通过偏振光学器件抑制了太阳背景光,提高了激光雷达在白天的探测能力[15]。LIU Xuefeng等通过采用法拉第反常色散滤光片(Faraday Anomalous Dispersion Optical Filter,FADOF)实现了激光雷达的日间测量[16]。MEI Liang等通过干涉滤波器件实现了激光雷达系统在日间对回波信号的获取[17]。这些研究要么是采用提高探测器性能[18-19]的方法,要么是采用特殊的光源,如带轨道角动量(Orbital Angular Momentum,OAM)的激光光源[12]。但是这些方法均是从硬件角度来隔离太阳光对激光雷达的干扰,且特殊的硬件系统价格昂贵,难以推广。
本文提出了一种可以从太阳光的背景噪声中提取目标区域激光回波信号的方法,该方法将形态学的开运算运用在闪光式激光雷达接收到的强度图像上,对闪光式激光雷达采集到的包含太阳光后向散射的强度图像进行预处理,可以有效地将标强度图像从太阳光的后向散射中提取出来。随后采用相邻帧差法[20],得到目标的距离信息。
1 开运算预处理的基本原理
形态学开运算是图像依次经过腐蚀运算、膨胀运算的过程,具有移除图像中孤立的点的作用。腐蚀运算是一种形态转换,它使用集合元素的矢量减法来合并两个集合[21]。假设增强电耦合器件(Intensified Charge Coupled Device,ICCD)在(x,y)处接收到的强度为I(x,y),则该点强度的腐蚀运算定义为

式中,(xε,yω)是(x,y)的邻域,⊖表示腐蚀运算操作符,S为结构元素,其窗口大小为(ε×ω),结构元素可以是一维的直线,也可以是二维的其他形状。腐蚀运算的结果是该像素点的强度值变为邻域窗口的最小强度值。腐蚀运算可以将较亮的区域面积变小,较暗的区域面积增大。
同理,膨胀运算的定义为

式中,⊕表示膨胀运算符。膨胀运算的结果是像素点的强度值变为邻域窗口的最大强度值,增大图像中较亮区域的面积,减小较暗区域的面积。将腐蚀运算和膨胀运算相结合,即先腐蚀运算后膨胀运算,得到基于数学形态学开运算。开运算定义为

式中,∘表示开运算操作符。开运算如图1所示,开运算可以将孤立的点去除(图1(a),(b)),而不改变其他部分的分布(图1(c)),可对激光雷达系统接收到的强度图像进行预处理,可以有效将目标周围由太阳光引起的离散噪声去除,将目标从太阳光污染中提取出来。结构元素对预处理的结果影响很大,结构元素越小,对于孤立的微小噪点滤除效果越好,并且由于本文中的目标建筑物为非规则图形,为了最大程度地保持目标结构,并根据结构元素选取规则[22],结构元素为(3×3)的十字结构。
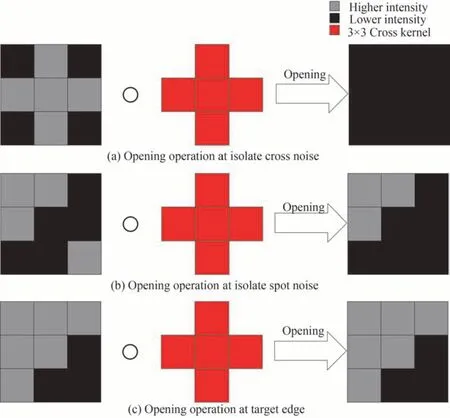
图1 开运算示意图Fig.1 Diagram of open operation
当距离选通激光雷达主动成像系统在白天进行测量时,尽管可以有效抑制后向散射,但是,探测器会接收到由目标反射的激光回波信号和太阳光,同时也会接受到由其他目标散射回的太阳光。这些光子虽然来自不同的源,但是它们聚焦在激光雷达传感器上的同一位置,无法区分。对于成像过程中的第i帧强度切片图像,有

式中,Ii为ICCD接收到的第i帧强度切片图像,它可以分为两部分:在目标区域内为第i帧强度切片中由目标返回的激光信号强度为第i帧强度切片中,探测器接收到的太阳光强度为随机噪声;在目标区域外,探测器所接收到的强度切片则由太阳光和随机噪声组成。
为了评价强度图像预处理结果,引入平均强度图像,即

式中,Ii为ICCD接收到的第i帧强度图像,N为总帧数。从式(5)可以看出,平均强度图像可以反映出噪声在成像过程中的平均分布。
2 实验研究
为了验证将开运算运用在闪光式激光雷达日间成像的可行性,采用自行研制的闪光式激雷达对500 m处的建筑物进行了日间成像实验。闪光激光雷达系统如图2所示,其中,激光器采用Pilot-3风冷脉冲激光器,其中心波长为532 nm,激光脉冲宽度为10 ns,单脉冲能量为2 mJ,激光器的重频为1 kHz。发散角由准直扩束系统调整。像增强器和CCD组成ICCD作为接收系统,像增强采用Photek MCP 125M,CCD采用大恒水星MER-125-30,其分辨率为1292×964。选通门宽为100 ns,选通步长为5 ns。根据式(5),为了尽可能增加由目标反射回的激光回波信号,实验中已将激光器的输出功率调至最大(2 W)。

图2 闪光式激光成像雷达Fig.2 Optical image of the flash imaging lidar
目标建筑物如图3所示,红色方框内的白色建筑为成像目标。目标建筑物左侧有一部分被前面的建筑所遮挡,未被遮挡部分呈阶梯状。建筑物顶部有若干长条形基站和两个储水罐。建筑物的距离范围约为500~518 m。

图3 目标建筑物实物图Fig.3 Picture of the target building
采用闪光式激光成像雷达系统在日间对目标区域进行扫描成像,其平均强度图像如图4(a)所示。由于平均强度图像像素强度值较低,根据式(6)对其进行了二值化处理,如图4(b)所示。

图4 闪光式激光成像雷达接收到的目标平均强度图像Fig.4 The average intensity image of the target received by the flash lidar

式中,Ibin(m,n)是二值化后(m,n)处的像素强度值,I(m,n)为二值化前(m,n)处的像素强度值。从图4(b)中可以看出,由于太阳光太强,由其他目标反射回的太阳光混杂在目标回波信号中,污染了ICCD接收到的强度图像,即使采用距离选通技术也不能将目标从太阳光的污染中提取出来,闪光式激光雷达系统还是能接收到位于目标区域前、后的物体反射的太阳光,导致目标区域与前、后物体混杂。因此,由ICCD接收到的原始强度图像,必须经过预处理才能获取目标的距离信息。
3 结果与讨论
分别对比了高斯滤波(Gaussian filter)预处理,中值滤波(Median filter)预处理,阈值分割(Threshold segmentation)预处理和形态学开运算预处理对ICCD接收到的每帧强度图像的处理结果,并根据式(5)得到预处理后的平均强度图像,如图5(a)、(c)、(e)、(g)所示。其中,图5(a)是经过高斯滤波对每帧强度图像进行预处理后根据式(5)得到的平均强度图像。高斯滤波是一种线性滤波,可以有效抑制噪声、平滑图像,图5(a)中高斯核的大小为5。图5(b)是根据式(6)对图5(a)进行二值化后的图像,与图4(b)相比,尽管高斯滤波预处理起到了部分抑制噪点的作用,但是目标周围的噪点并没有被很好地去除。采用中值滤波对每帧强度图像进行预处理后的平均强度图像如图5(c)所示,中值滤波卷积核的大小为5。中值滤波是一种非线性滤波,在处理脉冲噪声时效果极佳,并且可以很好地保护图像的边缘信息。图5(d)是根据式(6)对其进行二值化后的图像,与图5(b)类似,目标周围的噪点并没有被很好地抑制。图5(e)是经过阈值分割预处理后的平均强度图像,阈值为60,图5(f)是根据式(6)对其进行二值化后的结果。对比图5(f)、图5(d)、图5(b)和图4(b),阈值分割预处理似乎效果最好。从式(4)中可以看出,在ICCD接收到的每帧强度图像中,由目标反射回的回波信号比由非目标位置反射回的回波信号强,因此阈值分割预处理的效果比高斯滤波预处理和中值滤波预处理强。但是,还是有一些顽固的噪声并没有被完全剔除,这是由于在式(4)中并非是定值。采用形态学开运算对ICCD接收到的每帧强度图像进行预处理后的平均强度图像如图5(g)所示,图5(h)为根据式(6)对其进行二值化后的结果。对比图5(h)与图5(f),目标周围由太阳光引起的噪点明显减少,并且较为完整地保留了目标建筑物的边缘信息。这充分说明基于形态学开运算的预处理方法不仅可以将目标从太阳光污染中提取出来,还可以有效降低噪声,更有利于随后采用相邻帧差法得到信噪比较高的目标距离信息。
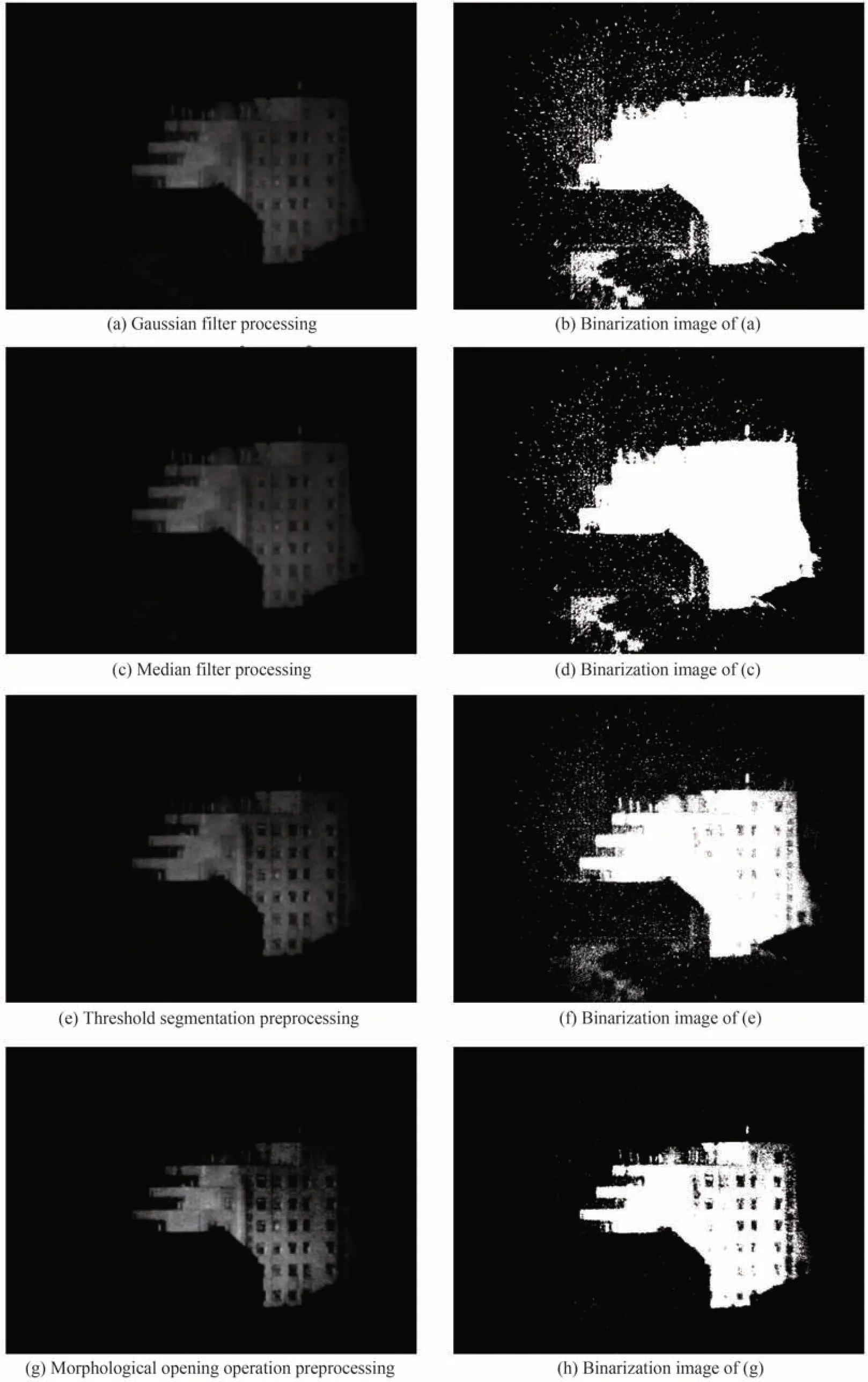
图5 采用不同方式预处理后的平均强度图像和其经过二值化后的强度图像Fig.5 The mean intensity image after different preprocessed methods and its binarized intensity image.
对四种方法预处理后的强度图像分别采用相邻帧差法来获取目标的距离信息,如图6所示,相邻帧差法的阈值均为20。图6(a)为经过高斯滤波预处理后,采用相邻帧差法得到的目标距离信息,可以看出,目标距离信息被太阳光淹没,高斯滤波预处理并不能将目标从太阳光污染中提取出来。图6(b)为经过中值滤波预处理后,采用相邻帧差法得到的目标距离信息,与图6(a)相比,尽管噪点变少,但是目标轮廓还是难以辨认,中值滤波也无法从太阳光污染中将目标距离信息提取出来。图6(c)为经过阈值分割预处理后,采用相邻帧差法得到的目标距离信息,与图6(b)相比,尽管目标较为清晰,但是周围噪点还是无法剔除,依旧可以看到位于目标物前部的建筑产生的噪点。图6(d)为经过形态学开运算预处理后,采用相邻帧差法得到的目标距离信息,可以看出,尽管目标周围还存在一些噪点,但是与图6(a)~(c)相比,目标建筑物周围的噪点被显著移除,并且最大程度地保留了目标建筑物的轮廓,可以清晰分辨出位于目标建筑物顶部的长条形信号塔和储水罐。

图6 采用不同方式预处理后结合相邻帧差法得到的目标距离信息Fig.6 The target distance information obtained by adjacent frame different method after different preprocessing methods.
分别对图6(a)、(b)、(c)相对于图6(d)计算了结构相似度(Structural Similarity,SSIM),结构相似度分别为0.78、0.83和0.85,结构相似图如图7所示。从图中可以看出,目标建筑物周围的结构相似度较低,而目标建筑物上的结构相似度较高,因此,基于开运算预处理后得到的目标距离信息在很好地抑制了其他三种预处理方法无法去除的由太阳光引起的目标周围噪点的同时,并未改变目标建筑物的结构细节。这充分说明,形态学开运算的强度图像预处理方法可以有效地将目标从太阳光污染中提取出来而不改变目标的形状。

图7 不同方式预处理后得到的距离信息的结构相似图Fig.7 SSIM maps of distance information obtained by different preprocessing methods
4 结论
本文提出了一种基于形态学开运算的强度图像预处理方法,通过对闪光式激光雷达系统在白天接收到的强度图像进行开运算预处理,可以将目标从太阳光污染中提取出来。采用自行研制的闪光式激光雷达系统在白天对距离500 m的目标建筑进行了成像实验。由于白天太阳光太强,即使采用了距离选通技术,仍旧无法剔除太阳光对目标强度图像的污染,导致无法直接采用三维重构算法根据强度图像获取目标的距离信息。经过基于形态学开运算预处理后,可以很好地将目标从太阳光污染中提取出来,与高斯滤波预处理、中值滤波预处理和阈值分割预处理方法相比,形态学开运算预处理方法不仅可以将目标建筑完整地从太阳光中提取出来,并且可以有效抑制其他三种方法无法去除的由太阳光引起的顽固噪声。随后采用相邻帧差法得到了目标的距离信息,距离范围从500 m到518 m。高斯滤波预处理、中值滤波预处理和阈值分割预处理与形态学开运算预处理的结构相似度分别为0.78、0.83和0.85,结构相似图和实验结果表明,形态学开运算预处理方法可以在有效抑制由太阳光引起的噪声的同时将目标从太阳光污染中提取出来,对于闪光式激光雷达在日间的应用有积极的促进作用。