侧脑室穿刺术的力反馈仿真
2022-11-25朱兆聚高楚航施家峰陈刘晶刘宇清何炳蔚
朱兆聚,高楚航,施家峰,陈刘晶,刘宇清,何炳蔚
(1.福州大学机械工程及自动化学院,福建省智慧医工联合工程研究中心,福建 福州 350108;2.福建省立医院,福建 福州 350001)
0 引言
侧脑室穿刺手术主要应用于严重颅内压增高时的紧急放液减压,是神经外科最常用的诊疗手段、医生入门必学的基本手术[1-2].其关键步骤是选择合适的打孔位置,并将穿刺针插入侧脑室进行放液减压操作.侧脑室作为脑部最重要部位之一,若不慎受损将导致严重后果,因此该手术实施具有较高风险[3],需要医生查看大量电子计算机断层扫描(CT)图片,并不断训练积累经验以降低手术风险.传统的神经外科教学主要是文献阅读、课本学习、实验室实验、尸体解剖、手术现场教学,但都存在诸多局限性.具体表现为:医学生在学习时空间想象能力有限,所受教学方式单一;尸体解剖尸源少、价格昂贵、维护困难;实习生在手术室内的学习往往压力很大,学习时间有限[4-5];3D打印技术可为手术训练提供高仿真颅脑模型,但利用3D打印技术为医学生提供的颅脑模型,对于手术经历为零或是经验较少的医学生及初级医师而言,频繁使用、更替3D颅脑模型在成本和资源上将造成极大的浪费[6-7].
虚拟现实技术与力反馈技术的发展,为模拟手术仿真训练的实现提供了新途径.利用虚拟现实技术特有的沉浸式仿真与力反馈技术的力觉模拟,能够为侧脑室穿刺术提供高仿真、安全、可重复使用的手术训练平台[8].力反馈技术在虚拟手术领域有广泛的应用,陈卫东等[9]提出新的软组织形变模型,引入虚拟体弹簧以用于力反馈计算并增强系统稳定性.夏雨[10]基于弹簧-阻尼模型改进了力反馈计算模型,实现切割形变力反馈模拟.Wang等[11]基于边界元(BE)技术开发实时逼真的大脑变形模型,实现牵引、切割等力反馈模拟.Wang等[12]结合有限元模型与质点-弹簧模型构建软组织形变模型,实现胸腔穿刺、腹腔穿刺、腰椎穿刺与骨髓穿刺的力反馈计算.Alaraj等[13]利用ImmersiveTouch平台开发了具有实时感觉触觉反馈的虚拟动脉瘤夹闭模拟.Tholey等[14]指出带有力反馈功能的手术设备相比于只提供视觉反馈的手术设备,能够帮助外科医生区分不同的组织,提高手术的成功率.
由于现有关于力反馈的研究多为获取软组织形变量从而计算力反馈,因而多侧重于软组织形变的研究,而此种力反馈多为软组织表层形变力,如切割力、牵引力等,对于穿刺过程中因手术器械与软组织表层及内部的交互产生的多层次感力反馈研究较少.针对这些问题,以实现穿刺力反馈层次感为目的,分析并总结软组织形变过程的作用力类别,并在此基础上研究穿刺力反馈计算模型,实现穿刺过程的力反馈层次感,使穿刺模拟过程的力反馈更接近真实手术的手感.
1 实验材料与方法
1.1 软组织作用力构成
在穿刺过程中,穿刺针与软组织的交互可以根据软组织的线弹性与内部粘性划分为3种:软组织形变力、软组织回弹阻力和软组织内部粘滞阻力.
根据穿刺针与软组织交互的过程及软组织的形变情况,基于以上划分的3个软组织作用力,可将其组合构建穿刺力反馈计算模型.因此,在穿刺针穿刺软组织的过程中,存在以下3种力:穿刺针开始与软组织接触,软组织开始产生形变,未被穿刺针穿透,仅有软组织形变力;穿刺针穿透软组织,软组织回弹,此时由于软组织回弹以及软组织内部的粘性,有软组织回弹阻力以及软组织内部粘滞阻力;穿刺针在软组织内移动,软组织回弹结束,穿刺针仅受到软组织内部的粘滞阻力.
1.2 软组织形变力计算
软组织形变过程中,形变力FD为:

(1)

软组织形变力与软组织形变相关,在研究软组织形变力前,需要先进行软组织形变研究.在软组织形变的基础上,将软组织形变物理模型参数进一步转化为软组织形变力反馈计算参数.
1.2.1 软组织形变物理建模
为了便于模拟,在组织连续性、组织均匀性、各向同性、粘性以及线弹性的软组织生物力学特性假定[15]的基础上研究软组织形变.质点-弹簧模型、有限元模型与边界元模型是软组织形变研究中最常用的物理模型.质点-弹簧模型的优点在于建模简单、实时性好,但在大形变的模拟中可能会出现不稳定的情况;有限元模型建模较复杂,实时性较差,但胜在模拟精确;边界元模型与有限元模型类似,但相较于有限元模型的完整模型仿真,边界元模型仅在模型的表面进行离散,模型的内部不进行处理,相对于有限元模型而言实时性较好.但有限元模型与边界元模型均涉及矩阵计算,计算量相较于质点-弹簧模型而言较大[16-17].
由于虚拟手术仿真需要具备较高的实时性,侧脑室穿刺术为神经外科微创手术,在手术模拟时不会产生较大的软组织形变,因此,选用实时性好的质点-弹簧模型构建软组织形变的物理模型,质点所受合力Fi有:
Fi=Fins+Fext
(2)
其中:Fins为质点所受内力,在质点-弹簧模型中为弹力与阻尼力;Fext为质点所受外力.
各质点满足牛顿运动学定律,因此有:
Fi=miai
(3)
1.2.2 物理模型参数设计
基于软组织的生物力学特性假定,构建的质点-弹簧物理模型满足胡克定律,各质点所受弹力为:
Fs=-Ks×ΔL
(4)
其中:Ks为弹簧的弹性系数,表征软组织形变的线弹性特性;ΔL为弹簧伸长/压缩量,在质点-弹簧模型中对应于质点移动量.
对于软组织的线弹性特性,有杨氏模量用于表征真实的线弹性特性,因此提出将杨氏模量转化为形变弹簧弹性系数的转化公式:

(5)
其中:σ为组织材料所受的应力;ε为组织材料在纵向上的应变;Δl为组织材料纵向上的应变量;F为组织材料所受外力;A为组织材料横截面积.
由以上各公式以及胡克定律,有:
(6)
因使用的质点-弹簧模型构建的物理模型用于模拟软组织表面的形变,与软组织内部无关,因此组织表层膜组织厚度D视为软组织材料的横截面积,因此有:
(7)
将形变弹簧的横截面积视为组织材料的横截面积,形变弹簧的形变视为组织材料纵向应变,最终有:
(8)
利用阻尼器反映软组织形变过程的迟滞与蠕变,它可以表示为质点速度的函数,在形变仿真过程中可以有效地避免由于质点过度振荡而导致的弹簧过度拉长等失真现象.对于阻尼力,有:
Fd=-Kd×v
(9)
其中:Kd为阻尼器的阻尼比,表征软组织的迟滞与蠕变;v为质点运动速度.阻尼比在共振频率附近为损耗因子的1/2,以表征软组织粘性的损耗因子计算阻尼比,有:
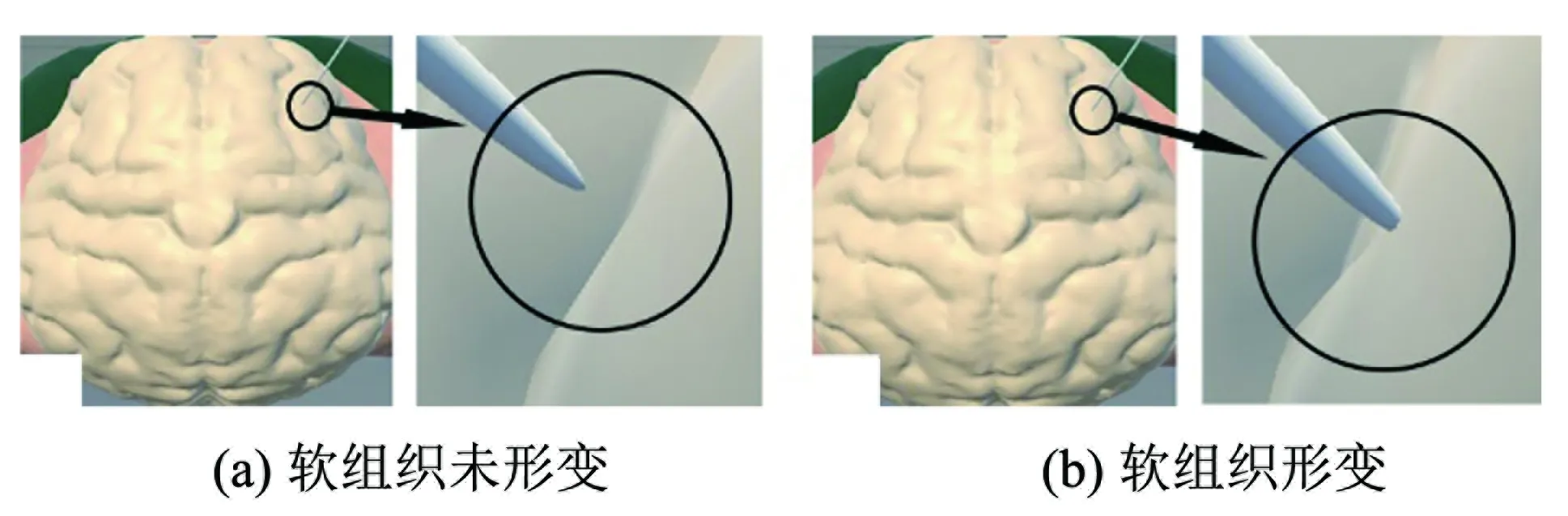
图1 软组织形变Fig.1 Soft tissue deformation
(10)

最终利用显式欧拉方法求解软组织形变物理模型,软组织形变效果如图1所示.
1.2.3 软组织形变力参数设计
软组织形变力计算需要获取弹性系数与阻尼比.在软组织形变过程中,由于形变质点的位置变化,形变质点与周边邻点连接的弹簧在形变后与力反馈弹簧形成夹角,即力反馈夹角,如图2所示.
因此,对于形变夹角α,有:
(11)
则对于力反馈弹力,有:
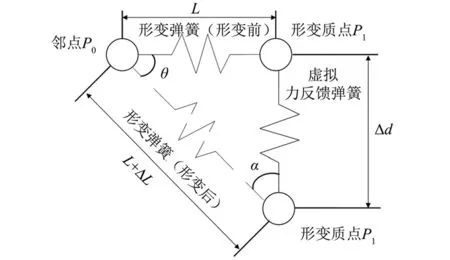
图2 形变质点位置分析Fig.2 Analysis of deformation mass point location

(12)

(13)

转化L,保留Δd,有:

(14)
由于阻尼力只与质点运动速度相关,这里对于阻尼比不做处理,则:
(15)
1.3 软组织回弹阻力计算
软组织在回弹过程中,软组织上层膜对穿刺针产生摩擦力,有:
Ff=μ×N
(16)
其中:μ为穿刺针与软组织间的摩擦系数;N为穿刺针受到的支持力,在软组织回弹过程中为软组织形变力的分力.
将软组织回弹过程中软组织静态表面与软组织形变表面形成的夹角称为形变夹角,如图3所示.
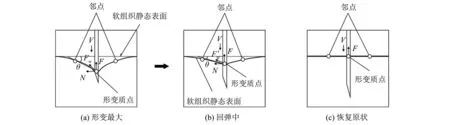
图3 软组织回弹阻力分析Fig.3 Analysis of soft tissue rebound resistance
1.4 软组织粘滞阻力计算
手术器械在软组织内部移动时,受到软组织由于粘性产生的粘滞阻力[18],穿刺针在软组织内部中移动速度越快,所受到的粘滞阻力也越大,粘滞阻力Fv为:
Fv=-K×v
(17)
其中:K为软组织内部的粘性系数.
对于软组织内部粘滞阻力,由于软组织粘性系数为软组织本身固有的属性且与软组织形变与否无关,这里无需进行进一步的转化与计算[19].
1.5 力反馈计算模型应用
结合穿刺力反馈的3个阶段及参数计算,有:

(18)
在侧脑室穿刺术中,其穿刺力主要体现在穿刺针穿刺脑组织与侧脑室,而侧脑室是由脑组织包围形成的腔体,内含脑脊液[20].因此将侧脑室与脑组织视为具有相同生物力学参数的软组织,依据软组织的几何模型构建其形变物理模型,将脑组织的杨氏模量、耗能模量以及软脑膜厚度代入形变物理模型的转化公式中,获取形变弹性系数Ks与形变阻尼比Kd的值.现有研究多与结合形变弹性系数、形变阻尼比结合,根据力反馈模型的计算公式和脑组织摩擦因子、脑组织粘性系数,计算不同阶段下穿刺针与脑组织、侧脑室交互时的力反馈.
在Unity3D软件上进行侧脑室穿刺术的开发,通过开源模型库获取根据通用人体解剖学的比例创建的虚拟脑组织模型文件,在穿刺过程中使用3D Systems公司生产的Geomagic Touch X作为输出力觉的力反馈设备.本研究利用3D Systems公司官方工具包OpenHaptics中的Haptic Surface组件、Haptic Effect组件-摩擦力效果以及Haptic Effect组件-粘滞力效果,结合穿刺力反馈计算公式编写脚本,控制各组件参数以模拟软组织形变力、软组织回弹阻力和软组织粘滞阻力.
2 实验验证
由于人脑组织较难获取,研究过程中涉及诸多科学伦理问题,因此常用哺乳动物的脑组织来替代人脑组织进行测试试验,这也是目前脑组织力学测试领域被广泛采用的试验策略.Nicolle等[21]通过实验证明人脑与猪脑的粘弹性性能没有显著性差异,猪脑可以作为人脑力学性能测试的替代品.此外,脑组织力学测试多基于离体脑组织,而离体脑组织与活体脑组织力学性能存在差异,有研究表明脑组织离体超6 h后,其硬度会略微增加[22].
综上考虑,利用新鲜猪脑来代替人脑模拟侧脑室穿刺术的穿刺过程.在进行穿刺力采集实验前,设计实验对比系统虚实对应效果,以验证力反馈设备手柄在虚实环境中的移动距离与路径是否具有1∶1的对应关系.使用螺旋机架固定力反馈设备的手柄,控制手摇轮使手柄移动,并同时在该系统中显示虚拟穿刺针移动距离,利用游标卡尺测量手柄的移动距离,如图4所示.
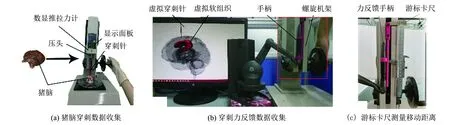
图4 虚实对应效果准确性测试Fig.4 Accuracy test of the virtual correspondence effect
分别使用机架控制力反馈设备手柄向下移动10、50、100 mm(记为d0),每个距离对应移动3次,记录系统中UI界面显示的移动距离(记为d1、d2、d3),数据统计分析结果如表1所示.

表1 设备与虚拟器械运动数据统计Tab.1 Equipment and virtual apparatus movement statistics (mm)
由表 1可知,虚拟移动距离误差在0.05 mm以内,误差量相比于位移总量而言极为微小,因此可以认为虚拟手术室中的手术器械与现实世界中的力反馈设备保持着较好的虚实对应关系.将穿刺过程中猪脑穿刺数据以及力反馈生成的力输出到外部txt文档中并整理成表格,导入到Matlab中将两组数据绘制成曲线,对比二者间的变化趋势.
3 实验结果与讨论
将穿刺力数据绘制成如图5所示的曲线.在猪脑上穿刺时存在两次数值突变现象,第一次突变发生在穿刺针穿透猪脑上层膜时,穿刺力为27.50 mN;第二次突变发生在穿刺针穿透猪脑下层膜,穿刺力为23.20 mN.而在虚拟穿刺中,同样发生了两次数值突变.第一次突变发生在穿刺针穿透脑组织上层,穿刺力为44.75 mN;第二次回弹发生在穿刺针穿透侧脑室穿刺力为35.00 mN.
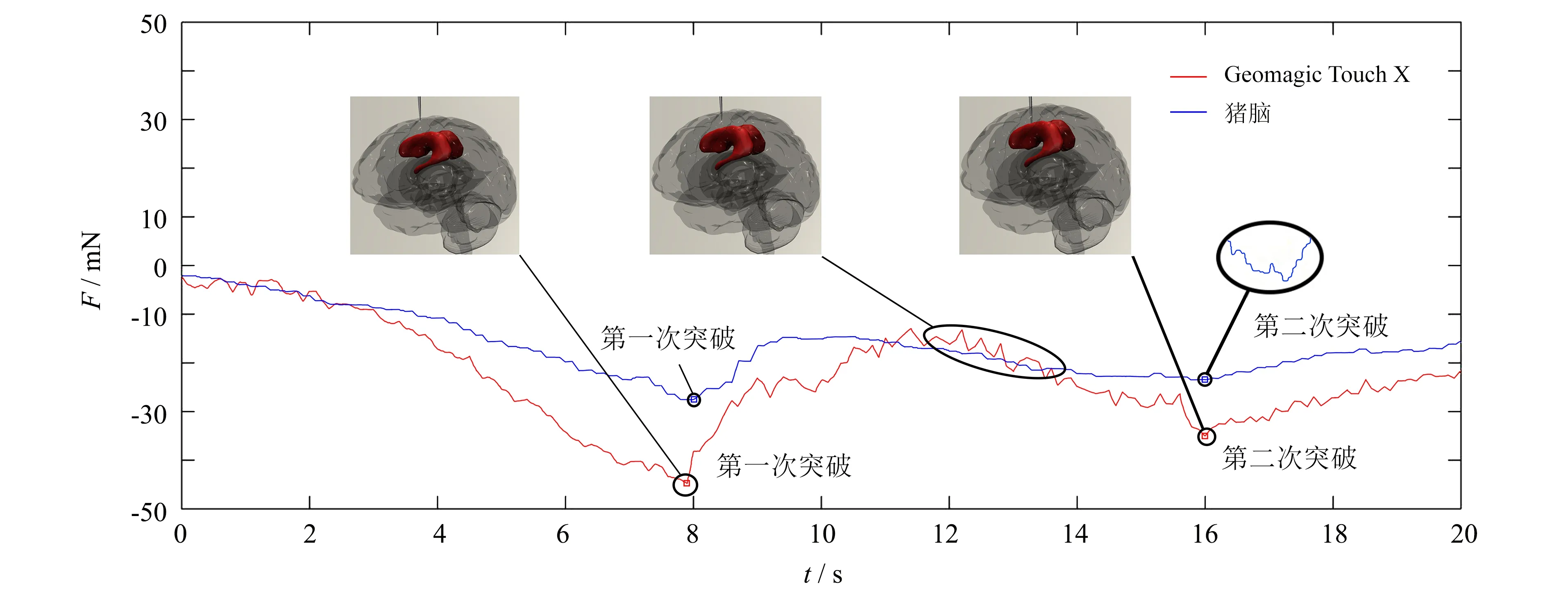
图5 穿刺力曲线对比Fig.5 Puncture force curve comparison
由图5可以得出,猪脑穿刺的穿刺力与虚拟穿刺穿刺力趋势一致性较高,能够有效复现真实脑组织穿刺时存在的两次突破感,实验误差来源主要为脑组织离体时间对力学性能产生影响和模型参数选择.通过观察实验结果能够得出,在穿刺猪脑过程中,穿刺力在到达第一次突破点前逐渐上升,在到达第一突破点后便以较快的趋势下降至平缓状态,在产生第二次突破前穿刺力开始逐渐增大,直到第二次突破后再次以较快的趋势下降至平缓状态.同样的,在虚拟穿刺中,两次穿刺突破后穿刺力也呈现快速下降趋势,是由于回弹阻力减小导致,直至回弹阻力减小为0,在曲线中呈现出平缓走势.相比较可得,虚拟穿刺力的变化趋势与猪脑穿刺力的变化趋势具有较高的一致性.
脑穿刺手术属于封闭性手术,医生不能直观地看到穿刺针的位置.脑组织主要由大脑皮质、大脑髓质和基底核3部分组成.由于结构差异的存在,不同组织将表现出不同的力学属性,医生可以根据接触力的变化判断穿刺针到达的区域.因此,在脑穿刺手术训练系统中,要求不同的虚拟软组织能提供大小不同的反馈力.本研究中将侧脑室穿刺术中的穿刺力分为软组织形变力、软组织回弹阻力与软组织内部粘滞阻力,提出一种适用于虚拟手术训练系统的力反馈计算模型.该模型选用质点-弹簧模型构建软组织形变物理模型,代入形变弹性系数、形变阻尼比等系数,计算不同阶段下穿刺针与脑组织、侧脑室交互时的力反馈.通过猪脑穿刺实验所得数据对力反馈计算模型进行验证.实验数据结果表明,该力反馈计算模型能够有效还原侧脑室穿刺术中穿刺力的变化,并在刺透猪脑上下层膜时伴随有突破感.突破感对于医学人员界定穿刺针所达到的脑部区域具有重要的辅助判断作用,凭借此突破感可判断手术是否成功.
4 结语
在软组织生物力学特性假说的基础上,通过分析软组织与穿刺针交互过程的作用力类别,结合软组织形变与软组织生物力学特性,构建穿刺力反馈计算公式.将该计算公式应用于侧脑室穿刺术中,并将虚拟穿刺力的穿刺数据与猪脑穿刺的穿刺数据进行对比,得出该计算公式在力的变化趋势上与真实穿刺具有较高相似度.
本研究的局限之处在于,由于人脑组织的稀缺性,在实验环节使用新鲜猪脑作为替代,测试得到的力反馈结果可能与人脑穿刺结果存在部分差异.在后续的工作中可以通过对人脑穿刺力进行采集,为所提出的力反馈模型做进一步评估.同时,该力反馈计算模型研究旨在如何实现模拟真实侧脑室穿刺术中两次突破感,因此对于计算模型的准确性研究尚未深入.这也将作为研究的下一步计划,未来将致力于提高所提计算模型的准确性,从而更加贴近真实穿刺手感.