空间高精度天线多轴机构精密装配与试验技术
2022-11-24赵本华
赵本华 张 斌 吕 东 王 青 王 磊 张 跃 王 燕
空间高精度天线多轴机构精密装配与试验技术
赵本华 张 斌 吕 东 王 青 王 磊 张 跃 王 燕
(北京卫星制造厂有限公司,北京 100094)
空间高精度天线机构通过三级驱动机构串联实现精确控制。针对多个驱动机构装配集成精度高、连接环节多、微重力卸载率大等难点,通过对天线机构装配精度误差分解方法,耦合控制调节多个驱动机构连接参数,采用数字化装调方法控制驱动机构安装精度,实现驱动机构空间轴线位置精度优于0.01°。采用低阻力、高跟随的吊挂式卸载方法,设计两级串联式、二级双自由度微重力模拟系统对天线机构空间环境模拟,高卸载率达到96.1%以上,实现天线机构展开过程中轴线波动误差控制在0.018°以内。通过单级驱动机构安装精确控制、空间多轴线精密装调、高精度模拟卸载技术方法,实现天线机构三轴装配调试后指向精度优于0.042°,满足空间高精度通信与导航定位的指标要求。
空间天线;驱动机构;精密装配与控制;微重力展开试验
1 引言
空间卫星天线机构在国外八十年代得到较为快速发展,西方发达国家的多个公司和科研单位开展了各种型号的卫星天线机构研究,包括由美国多个公司如TRW、Honey-well及Matra Marconi相继研究多个类型卫星天线机构[1~3],国内相关科研院所也在八十年代中后期开始卫星机构的研制工作,哈尔滨工业大学对含间隙的卫星天线双轴机构动态特性开展了研究,获得间隙、冗余约束等多个因素对天线机构的指向精度、动态特性的影响[4]。空间多轴高精度天线是一种应用于航天导航、通信设备的关键载荷,可以应用于空间多种卫星信号传输与通联,综合指向精度要求优于0.045°以内、运行寿命12年以上,较以往天线机构提出了更高的要求。
航天器装配试验环节是加工制造过程中的最后一步,对产品性能起着总结与决定性的作用,作用影响显著[5]。空间多轴机构是实现天线精确控制的功能部件,精密装配与测试工艺技术水平直接决定了天线多轴机构的指向精度[6]。空间天线机构由于包括多个驱动机构的装配与连接,需要在多轴串联装配后达到精度可控、高可靠、长寿命运行性能目标,对于天线装配、测试技术提出较高的要求和挑战。
2 天线机构精度控制与难点分析
2.1 装配精度与机理分析
空间高精度天线机构是由轴、轴、轴以及目标轴组成,具体天线结构示意图如图1所示。

图1 天线机构外形结构示意
空间驱动机构主要由高精度驱动源、减速器、位移传感器等部件组成,空间在轨运行时高低温、微重力等环境造成精度偏差要求机构装调精度高。天线机构由3轴系组成,结构复杂,采用手动方法装配实施过程存在误差控制难度大,因此需对装配工艺技术开展分析研究,获得精度精确控制方法,并通过空间展开试验验证天线指向精度是否满足卫星性能需求。
天线机构装配精度最终指标主要是指天线轴D的指向精度。轴的指向精度需要在装配环节中重点保证轴、、安装与运行精度,为了保证轴系的装配精度,采用容差匹配方法精密装配天线机构,运动原理如图2所示。
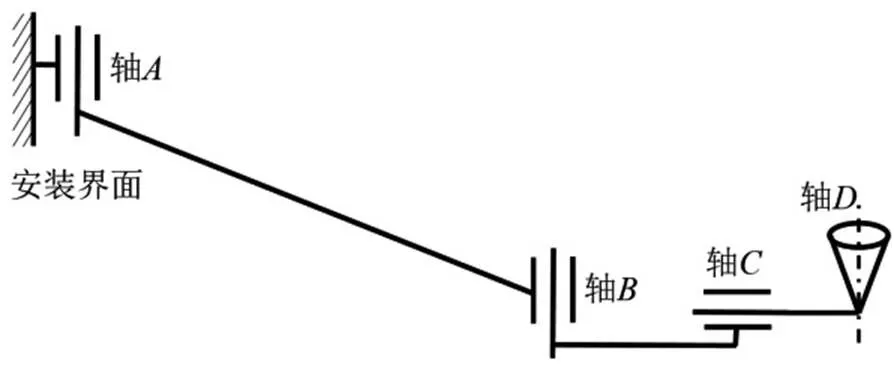
图2 天线机构运动简图
天线机构指向精度由、、三轴的角度误差之和,如下式所示。
(1)
式中,轴装配误差为;轴装配误差为;轴装配误差为;轴传动误差为;轴传动误差为;轴传动误差为。
天线机构指向误差,为天线机构综合矢量方向。由此得知装配精度对天线指向精度影响较大,需要重点开展装配控制。
2.2 装配技术难点分析
2.2.1 驱动组件与结构部装精度调整与控制难点分析
空间轴系位姿检测与调整分析:轴系输出精度主要由驱动机构传动精度、安装精度组成,驱动组件、固定支架、连杆组件等组成单个驱动模块,难点在于输出轴系为空间运动轴系,需要对空间动态轴系进行精确采集并标定。
装配接口模拟设计与分析:由于整星需要高精度控制天线姿态位置,对天线运行精度要求高。基于天线在卫星上的装配固定姿态,需要在地面精确模拟整星固定姿态位置,达到天线在整星上精度符合卫星指标需求。
2.2.2 多驱动机构串联装配精度控制难点分析
天线分为固定模块、转动模块,转动模块由轴、轴、轴等组成,转动模块组成为空间异形结构,质心不居中,在装配时容易受重力作用产生偏载,对齐难度大。轴与连杆组件空间长度大于1500mm以上,采用两端法兰连接,基于连杆组件大尺寸、低刚度、高精度的特征,轴、、受重力载荷直接作用至连杆组件上则会发生偏斜,因此需要对连杆组件另一侧的轴、、进行重力卸载,通过模拟空间微重力工况后再进行轴与连杆组件之间的装配调试与精度测量,降低地面重力、装配应力等参数引入到天线机构系统中的误差。
2.2.3 高精度微重力模拟卸载难点分析
通过分析天线机构存在组件多、精度高、构型复杂等特点,可以采用微重力模拟卸载的方式有下端气浮支撑法、上端悬吊法等[7]。该结构为空间复杂三轴构型,运动幅度大,机构为刚性连接,要求卸载率高,需防止机构受重力偏载损坏。重点分析其在天线机构中可以应用的几种微重力模拟卸载方法,如表1所示。

表1 天线机构微重力模拟卸载方法对比分析
3 装配与试验技术方法
3.1 驱动组件与结构部装精度控制
3.1.1 轴系安装精度控制技术
一是轴线的精确标定与测试。通过设计高精度卫星模拟安装平台,采用设计装配工艺基准并通过动态标定方法对轴系进行空间动态轴线标定,并通过高精度光学元件对空间轴线进行记录,最后实现轴线的装配与测量。
二是卫星安装接口工艺模拟设计与精度控制。由于整体方案是天线机构在地面进行集成装配测试与试验后再装星,工艺过程复杂。因此设计了高精度卫星模拟装置,同时工艺上对位置精度、孔位尺寸精度关键环节都进行了等级提高处理,精度优于0.01mm,避免在同样设计接口精度时由于区间容差导致安装干涉风险,确保天线机构装配至整星上装配精度与效率。
3.1.2 接口模拟装置设计与分析

图3 在模拟卫星装配界面上天线安装示意
根据天线在地面受到重力等载荷施加影响,通过分析在轴系方向与竖直方向不同时存在重力载荷对轴系偏载力矩的作用,导致轴系运转时径向载荷加大,引入了地面额外载荷误差。因此将模拟卫星装配界面的角度与轴支撑角度形成90°,通过天线展开轴系的方向与竖直方向一致,天线与模拟卫星装配界面连接如图3所示,天线安装角度精度控制在0.008°以内。
3.2 多驱动机构串联装配精度控制
基于由轴、轴、轴组成转动模块质心分布不规则、安装状态不确定,为了克服空间异形转动模块安装精度控制难题,创新设计了微重力平衡卸载方法,如图4所示,通过施加平衡载荷将转动模块调节成水平状态,水平度控制在0.01°以内,最后再进行与轴对接安装,实现水平稳定安装、连接精度可控。

图4 动态模块微重力对接与装配
通过空间结构尺寸、装配场地条件、精测设备布置等综合工艺技术分析,提出了多点、分布式精密检测方案。通过动态标定方法获得轴系空间位置,获得轴系装配调节参数,确保轴、轴平行度优于0.015°。
4 试验验证与分析
4.1 微重力展开试验装置设计与分析
基于天线机构多自由度在轨展开试验需求,开展天线机构模拟在轨展开与指向运动微重力试验研究。
天线机构展开过程为平面三维运动轨迹,运动过程需要低摩擦、高跟随地进行卸载,重力矩平衡原理如下:
=1·1=2·2(2)
式中:——力矩,N·m;1——天线机构动态模块质量,kg;2——平衡载荷质量,kg;——重力加速度,m2/s;1——动态模块质心与卸载吊点距离,m;2——平衡载荷质心与卸载吊点距离,m。
根据天线机构指向功能部分两轴驱动同时运动在水平、竖直方向上形成三维运动轨迹,运动较平面展开运动更为复杂,为典型的三维运动机构。基于该种微重力模拟卸载需求,采用可伸展、自适应、二级串联、吊挂式结构进行三维运动模拟卸载,该种结构可以适应两轴驱动机构部分的质心在、、的3个方向上同时变化时的卸载模拟需求,如图5所示。最后实现对轴、轴进行微重力卸载模拟,达到对天线机构的微重力精确模拟,重力卸载率达到96.1%以上。

图5 天线机构三维展开微重力模拟卸载
4.2 天线展开试验精度测试与分析处理
天线机构装配后需经展开试验,验证装配工艺可行性和指向精度的可达性。为了观察天线运动过程的变化,设置了高精度水平检测系统,对天线机构展开试验过程中的上下波动参数进行统计记录,以获得机构的展开运动规律。
通过控制天线机构重力卸载平衡状态,实现天线机构展开过程中与竖直方向垂直精度优于0.018°,满足小波动高精度展开试验目的,天线机构在运动过程中上下波动曲线如图6所示。

图6 天线机构运动精度图
采用4台高精度光学测试设备检测天线机构指向精度,通过装调优化后指向精度优于0.042°,实现天线机构的高精度定位指向的装配目标。
天线展开与收拢过程中在展开角度80°水平波动误差最大相差0.011°,主要原因为驱动机构轴系在正反转运动时存在一定的回差,以及微重力卸载吊挂系统累计误差导致。
5 结束语
通过对高精度天线机构装配与试验方法研究,提出工艺技术方法,完成试验验证,实现天线机构高精度指向功能,主要结论:
a. 通过对天线机构精度影响因素分析,制定了多轴先分步后联调的装配工艺方案,解决了天线复杂装配难题。
b. 设计轴系标定和装配模拟平台,实现单轴机构竖直精度优于0.01°,降低重力对天线机构转轴偏载作用,保证天线机构调试精度,整机展开轴线竖直精度优于0.018°。
c. 通过装配与试验工艺过程仿真分析,设计了水平在线检测与控制工艺方案,实现对空间轴线的精确记录和实时采集,检测精度优于0.002°,有效指导和评估天线机构展开运动特性。
d. 对天线机构的微重力模拟方法开展了研究,设计低阻力、高跟随、两级复合吊挂式微重力模拟卸载方法,实现微重力高卸载率达到96.1%以上,天线机构多次重复顺利展开,指向精度优于0.042°,保证天线机构高精度高可靠运行。
1 Gawronski W, Baner F, Quintero O. Azimuth-track level compensation to reduce blind-pointing errors of the deep space network antennas[J]. IEEE Antenna and Propagation Magazine. 2000, 42(2): 28~38
2 Stephen R J. Topex high-dain antenna system deployment actuator mechanism[C]. The 25th Aerospace Mechanisms Symposium, Washington, 1991:205~206
3 Bapna D, Rollins E, Foessel A. Antenna pointing for high bandwidth communications from robots[C]. IEEE Conference on Robotics and Automation. 1998: 104~110
4 程东起. 含间隙卫星天线双轴驱动机构动态特性分析[D]. 哈尔滨:哈尔滨工业大学,2012:12~13
5 万飞. 导引头伺服机构动态装调关键技术研究[D]. 长沙:国防科学技术大学,2014:2~3
6 陈烈民. 航天器结构与机构[M]. 北京:中国科学技术出版社,200:7~12
7 从强. 空间机构地面重力补偿设备跟踪研究[J]. 航天器环境工程. 2012,29(1):94~97
Precise Assembly and Test Technology of Space High-precision Antenna Multi-axis Mechanism
Zhao Benhua Zhang Bin Lv Dong Wang Qing Wang Lei Zhang Yue Wang Yan
(Beijing Spacecrafts, Beijing 100094)
The space high-precision antenna mechanism is accurately controlled through the series connection of three-level driving mechanisms. Aiming at the difficulties of high-precision assembly and accuracy integration of multiple drive mechanisms, many connection links, and high microgravity unloading rate, the coupling control adjusts the connection parameters of multiple drive mechanisms by decomposing the assembly accuracy error of the antenna mechanism, and adopts the digital assembly and adjustment method to control the driving mechanism. The installation position accuracy of the spatial axis of the drive mechanism is better than 0.01°. Through the hanging unloading method with low resistance and high follow-up, a two-stage series and two-degree-of-freedom microgravity simulation system is designed to simulate the space environment of the antenna mechanism. The high unloading rate is over 96.1%. The axis fluctuation error is controlled within 0.018°. Through the technical methods of single-stage drive mechanism installation precise control, space multi-axis precise adjustment and high-precision simulation unloading, the pointing accuracy of the antenna mechanism after three-axis assembly and debugging is better than 0.042°, which meets the index requirements of space high-precision communication and navigation positioning.
space antenna;driving mechanism;accurate assembly and control;microgravity deployment test

THl64
A
“十三五”国家重点研发计划课题(2019YFB1309604)。
赵本华(1985),高级工程师,机械电子工程专业;研究方向:空间机构制造技术。
2022-09-21
