磁极偏转永磁辅助同步磁阻电机优化设计
2022-11-23卞玉康史立伟刘楷文
卞玉康,史立伟,刘楷文
(山东理工大学交通与车辆工程学院,山东淄博 255000)
0 前言
由于永磁电机具有高效率等诸多优点,在生活中具有广泛的应用[1-2]。但由于永磁电机对稀土依赖性大,研究人员开发了少稀土的永磁辅助同步磁阻电机(Permanent Magnet Assisted Synchronous Reluctance Motor,PMA-SynRM)。PMA-SynRM同时具备永磁同步电机以及同步磁阻电机的优点,能够满足高功率密度、高效率等应用要求,因此PMA-SynRM在电动汽车等领域有着广阔的发展前景[3-7]。
PMA-SynRM存在转矩脉动大的缺点,降低该电机的转矩脉动一直是研究重点。有研究提出同一电机的转子磁障采用不同的角度,针对不同的磁障进行优化,选择不同的角度进而减小转矩脉动[8-9]。文献[10]采用灵敏度分析对电机进行了多目标优化设计,在灵敏度分析中研究了永磁体的位置和尺寸对电机转矩性能的影响。文献[11]改变永磁体的形状,通过改变磁路的方式降低转矩脉动。文献[12]研究了各层磁障间不同的宽度比与转矩脉动的关系,进而设计出了磁障渐变同步磁阻电机。文献[13-14]分别采取在转子上开辅助槽和定子斜槽的方法降低电机的转矩脉动。上述文献虽然降低了转矩脉动,但是电机结构相对复杂,会造成电机制造成本增多。
针对上述问题,本文作者提出磁极偏转永磁辅助同步磁阻电机结构,令转子磁障中的磁极发生角度偏转,使磁极与定子作用产生的谐波相互削弱,达到降低转矩脉动的目的。此外,以提高电机输出转矩和减小转矩脉动为优化目标,将有限元法与Taguchi法相结合,对电机进行多目标优化,使电机具有最优的转矩性能。通过仿真和试验验证所提出的基于多目标优化方法的磁极偏转永磁辅助同步磁阻电机与传统结构电机相比具有较好转矩的特性。
1 拓扑结构
文中提出的PMA-SynRM为8极48槽结构,定子采用单层绕组,电机转子采用双层磁障结构,永磁体嵌入在转子磁障中。电机结构如图1所示,与传统的PMA-SynRM不同,其磁极偏转结构电机磁极绕其中心点偏转一定角度θ,磁障角度和磁极厚度分别用W和H表示。电机相关参数如表1所示。

表1 永磁辅助同步磁阻电机相关参数
基于绕组函数理论和等效磁路法,永磁辅助同步磁阻电机的平均转矩和转矩脉动可以分别表示为
(1)
式中:p为极对数;rg为气隙半径;Leff为轴向长度;γd为电流角;fs1为定子磁动势基波;fr1为转子磁动势基波;fsh为定子第h次谐波;frh为转子第h次谐波。
由式(1)可知,电机转矩脉动与fsh以及frh有关。当电机定子结构参数一定的情况下,定子磁动势函数也随之确定。在采取通过优化转子磁动势减小转矩脉动时,多层磁障式结构电机的转子磁动势与永磁体和转子磁障密切相关。
2 有限元法选择初始优化参数
为研究磁极偏转角度θ、永磁体磁极厚度H、磁障角度W与转矩脉动Tr及转矩Te之间的关系以及选择初始优化参数,用有限元法求解Tr以及Te之间的二维等高线,根据二维等高线图选取最佳的参数取值范围,弥补Taguchi法优化电机结构依赖初始值选取的缺陷。
图2所示为θ-W-H与转矩脉动Tr关系的等高线。图3所示为θ-W-H与转矩Te关系的等高线。
由图2(a)(b)可看出:转矩脉动Tr在8%以下时两个图中θ共有部分为[0.3°,2°];由图2(a)(c)可看出:转矩脉动Tr在8%以下时两个图中H共有部分为[2.5,3.6] mm;由图2(b)(c)可看出:转矩脉动Tr在8%以下时两个图中W共有部分为[30°,38°]。综合上述,θ、W、H在转矩脉动Tr在8%以下时的取值范围:θ为[0.5°,2°]、H为[2.6,3.6] mm、W为[30°,38°]。在对图2中θ、W、H进行选择,满足转矩脉动Tr在8%以下时,结合图3中θ-W-H与转矩的二维等高线图,对转矩在15.5 N·m以上的θ、W、H进行选择,最终确定θ、H、W的范围分别为[0.5°,1.7°]、[2.6,3.4] mm、[32°,36°]。
3 多目标优化设计
Taguchi法的优点是可以通过建立正交表,通过较少的试验次数选取所需要的结构参数,且可以达到对多个优化目标进行设计的目的[15]。
在正交试验中,选取磁极偏转角θ、永磁体磁极厚度H、磁障角度W共3个参数进行优化。每个参数选择5个因子水平,如表2所示。在正交试验中,选择平均转矩Te、转矩脉动Tr为电机的优化目标。

表2 参数的影响因子水平
3.1 优化过程
选取3个参数变量,每个参数的因子水平数为5,如果采用传统的单变量、单目标优化方法则需要53=125次试验,而采用Taguchi法则只需25次试验就可以完成电机的多变量、多目标的优化设计。在正交试验中,对选取的优化目标建立参数影响因子的正交试验矩阵,并利用有限元法求解试验矩阵,结果如表3所示。
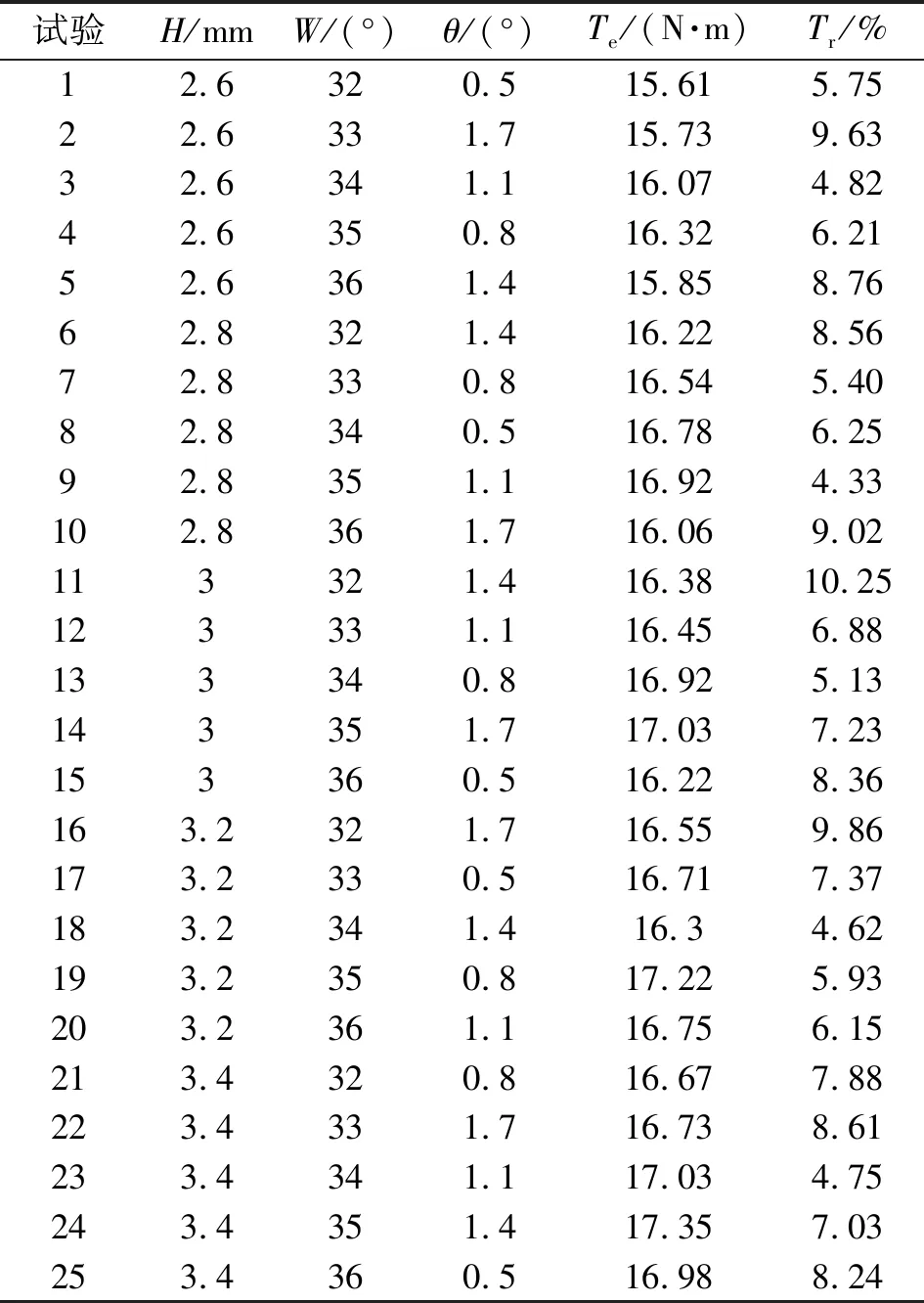
表3 试验正交表和求解结果
对表3中的试验结果进行平均值计算,公式如式(2)所示:
(2)
式中:n为试验次数,试验共进行了25次;Si为第i次试验的优化目标值。优化目标Te、Tr的平均值分别为16.55 N·m、7.04%。
为分析参数在各性能指标中所占的比重,需对Te、Tr进行方差分析。根据上述所得结果计算出参数每个因子水平对应的Te、Tr均值,如参数W在水平1下对Te的影响如下:
TeW1=(Te1+Te6+Te11+Te16+Te21)/5
(3)
同理计算出其他参数在不同因子水平下对应的Tr、Te平均值,结果如图4所示。
在此基础上对方差进行计算,可以得到变量因子对Te、Tr的影响比重,其中H对Te的影响比重为
(4)
同理可求得各参数对Te、Tr的影响比重,记录于表4中。
由图4可知:使电机转矩脉动最小的优化参数因子组合为H(2)、W(3)、θ(3), 电机转矩最大的优化参数因子组合为H(5)、W(4)、θ(2); 磁极厚度H对转矩脉动的影响可忽略,且随着磁极厚度的加大,转矩也加大,但当磁极厚度到达3 mm时,转矩增加速度减缓,因此磁极厚度选为3 mm;当转矩脉动最小、转矩最大时,磁障角度分别为34°和35°,W为35°与34°相比,转矩脉动大0.57%,转矩大0.3 N·m,最终选择转矩更大的35°。同时观察θ与转矩脉动、转矩的关系可知,当θ为1.1°转矩脉动最小,且θ在0.5°~1.4°范围内,转矩变化极小,因此θ选择为1.1°。最终选择的优化参数如表5所示。
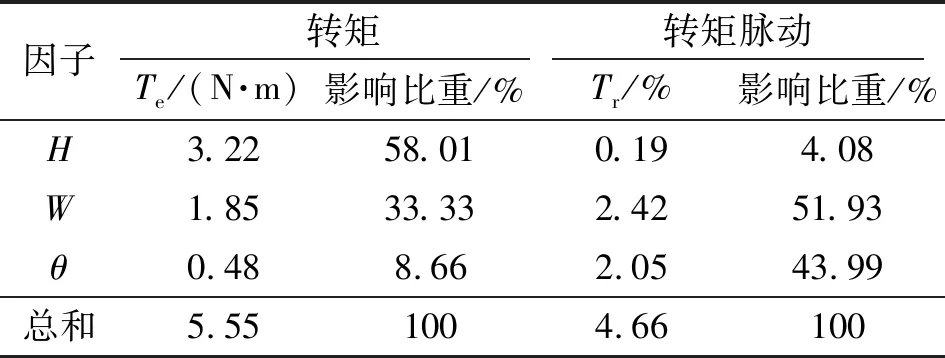
表4 各参数对优化目标的影响比重
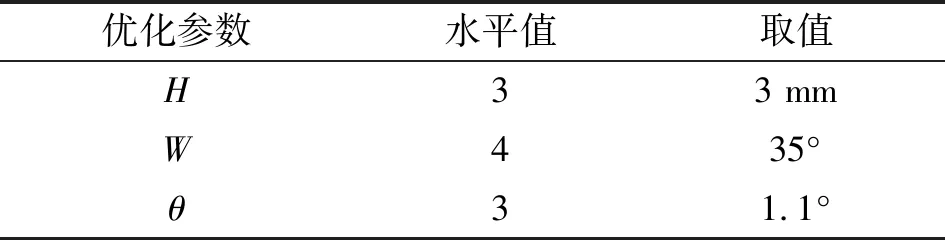
表5 优化参数取值
3.2 优化结果对比分析
为验证所提优化方法的有效性,对比优化前后磁极偏转永磁辅助同步磁阻电机的电磁性能,结果如图5所示。可知:与优化前的转矩相比,优化后电机转矩脉动由10.45%降低到4.81%,约降低了5.6%,同时平均转矩从16.1 N·m上升至17.4 N·m,上升了8.1%。优化后的结果满足表1中的要求。
图6所示为在3 000 r/min下,对电机优化前后的空载反电动势进行傅里叶分析结果。
由图6可知:优化后,基波幅值由44.6 V上升至47.1 V,优化后电机的转矩密度有所提升。
由式(1)可知,转矩脉动主要为10m±1次谐波,其中以9次、11次谐波为主,优化后的电机11次谐波从8.2 V降低到5.1 V。
4 样机试验验证
对上述分析结果进行试验验证,试制一台8极48槽的磁极偏转永磁辅助同步磁阻电机,如图7所示。
图8所示为电机反电势试验及结果。利用伺服电机拖动样机转动,通过示波器输出样机反电势波形。可知:实测值为45.5 V,仿真值为47.1 V,由于加工制造等影响,实测值略低于仿真值。
图9所示为搭建的测功机试验平台,图10所示为通过测功机试验平台得出的试验结果。可知:样机转矩与效率均满足参数要求。
5 结束语
本文作者提出了一种磁极偏转永磁辅助同步磁阻电机,基于有限元法和Taguchi法对比了磁极偏转结构电机与传统结构电机,得出如下结论:
(1)电机转子磁动势与磁极密切相关,通过对磁极进行偏转,可有效地降低电机的转矩脉动;对磁极偏转电机进行优化,优化后磁极偏转电机结构比传统结构电机转矩脉动下降5.6%,转矩提升8.1%;
(2)所选择的优化参数中,对转矩脉动影响较大的是磁障角度W和磁极偏转角θ,占比分别为51.93%和43.99%,对转矩产生主要影响的是磁障角度W和磁极厚度H,占比分别为33.33%和58.01%;
(3)利用有限元法可快速对优化参数进行初始选择,避免了Taguchi全局寻优能力差的缺点。