船舶大功率电力推进虚拟同步电机控制方法
2022-11-19孙志豪黄文焘余墨多邰能灵
孙志豪,黄文焘,卫 卫,余墨多,邰能灵
(1. 上海交通大学 电力传输与功率变换控制教育部重点实验室,上海 200240;2. 中国船舶及海洋研究工程设计研究院,上海 200011)
0 引言
综合电力系统将船舶动力与电力合二为一,实现了全船设备的集中控制与能源的高效利用,具有燃油经济性好、系统轻量化、噪声水平低等突出优势,是船舶动力系统的主要发展方向。电力推进是综合电力系统最重要的组成部分,其功率需求可达船舶电站总容量的50%~80%。受航行工况、海况的复杂影响,电力推进功率极易产生大幅波动或冲击[1],对船舶综合电力系统的安全稳定性能造成威胁。
电力推进功率波动平均可达船舶总功率的30%,是系统最大的功率扰动源,通过螺旋桨-推进电机-变频器耦合传递至船舶电站,进而冲击系统电压与频率稳定性。这不仅会使船舶电站频繁调节,对系统的安全稳定以及电气设备的寿命造成不利影响[2],还会威胁其他作业系统的正常运行。日本船东保赔协会规定在启动推进电机与其他电机型负载时必须保证系统有足够的容量裕度[3-4],但是受海浪等自然因素影响而产生的推进功率冲击不可避免,这会压缩该容量裕度,为航行带来安全隐患。因此,抑制推进负载功率波动对提升综合电力系统的安全稳定性能具有重要的意义。
目前,相关研究主要从电站调控的角度开展,在电站系统中增设电池、超级电容等,采用全局功率管理[5]等方式降低负载冲击对系统的影响。但此类方法对储能装置有较高的要求,还存在增加成本、影响船舱布局、易引发换流器发生振荡[6]等问题。文献[7]提出了推进功率的协调控制方法用于降低功率冲击对系统频率的影响,但会影响推进调速性能,降低航行速度。变频器作为电力推进与船舶电网的接口,既为推进电机提供所需电能,又负责对其进行调速控制。推进变频器由整流单元与逆变单元构成,两者共同决定了推进负载的功率特性。优化变频器的控制策略,利用直流电容进行储能,以改善不同工况与海况下的功率特性,是解决调速性能损失难题的突破口。
电力推进变频器通常采用直接转矩控制或矢量控制策略,实现对电动机转矩与磁链的解耦控制。基于双闭环控制结构,转矩环参考值由上一级转速环给定,实现了良好的调速性能。但复杂的海况易造成推进功率大幅度波动。若前端整流器无法主动抑制功率波动与冲击,则会对系统的安全稳定造成不利的影响。虚拟同步电机VSM(Virtual Synchronous Machine)是一种模拟同步电机运行特性的换流器控制方法,以电容等储能单元为载体,为变频驱动系统提供灵活的虚拟惯性与阻尼。目前,VSM 技术在分布式电源与微电网[8-10]的逆变器控制方面得到了广泛的应用研究,但针对整流环节的负荷型VSM控制的研究则较少[11]。文献[12]首次提出了应用于变频逆变侧的VSM 控制方法,与矢量控制相比,其具有控制结构简单、易于实现的优势,但是调速性能不佳,难以在大容量低速的电力推进中广泛应用。文献[13-14]提出了电动汽车充电接口的VSM 控制方法,能够提高充电设施的惯性,参与电网的调频辅助服务,但是并未从数学建模的角度分析所提控制策略的优势。进一步地,文献[15]对变频空调压缩机的整流器进行VSM 控制改造,利用群聚类方法构造空调参与电网一/二次调频的策略与架构。文献[16]提出了一种基于VSM 的柔性直流输电系统的控制策略,整流与逆变均采用VSM 控制,并给出了小信号数学模型与系统参数的设计方法,但所提方法未考虑负载功率特性。因此,可以考虑采用负荷型VSM 整流控制与矢量逆变控制,增加交流侧虚拟惯性与阻尼,改善电力推进负荷的功率特性,同时避免VSM逆变控制对推进电机调速性能的影响。
本文提出了一种船舶电力推进变频VSM 控制方法,用于解决电力推进对电网造成大幅功率冲击的难题。变频装置的整流部分采用VSM 控制策略,利用直流电容储能为变频装置提供惯性支撑,在不依赖额外储能与不影响推进性能的前提下,减少电力推进系统对船舶电网的功率冲击。考虑直流电容与电机负载的功率特性,建立小信号模型,分析控制参数对系统响应特性的影响,并给出了一种参数设计方法。利用PSCAD/EMTDC 和半实物仿真验证了所提控制策略的有效性与可靠性。
1 船舶电力推进系统
1.1 电力推进系统结构
船舶电力推进系统包括变频器、推进电机、螺旋桨和相关控制器,由船舶电站通过交流电缆与配电板直接供电,其结构如图1 所示。变频器一般采用背靠背型,由整流单元与逆变单元构成,将船舶电站的交流电转换为电压频率和幅值可调的交流电。推进电机与变频器逆变侧直接相连,经过轴系后带动螺旋桨旋转,实现功率从网侧向螺旋桨传递,完成了系统负载转矩的机电转换过程。
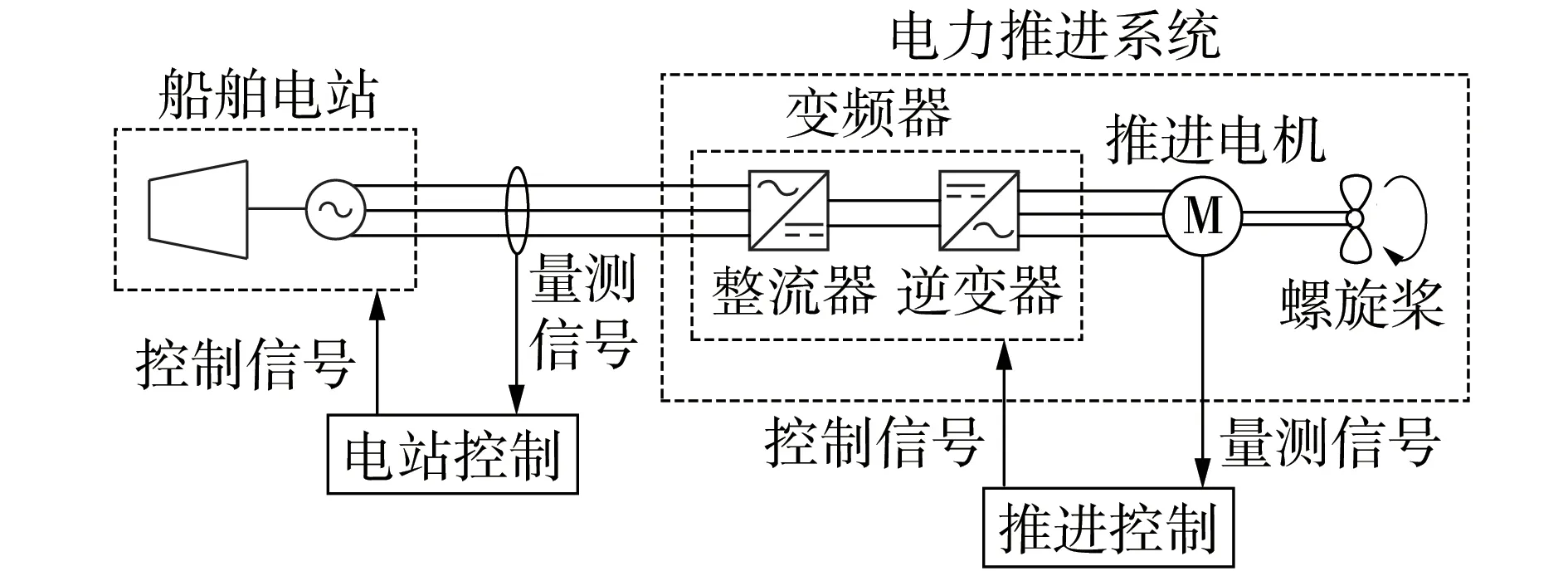
图1 船舶电力推进系统结构Fig.1 Structure of ship electric propulsion system
典型中压交流电力推进变频器的拓扑结构见附录A 图A1,主要组成部分包括整流器、直流电容、制动回路、逆变器等。整流器作为AC/DC 接口,将船舶电站的三相交流电压转换为直流电压,大多采用多脉波不控整流方式,如附录A 图A1(a)所示,具有结构简单、成本低、网侧电流谐波少的特点;也有部分整流器采用主动前端AFE(Active Front End)整流的方式,如附录A 图A1(b)中的三相电压型脉宽调制PWM(Pusle Width Modulation)整流器所示。一般采用定直流电压和无功功率的双闭环控制策略,在本文中将其称为Udc-Q控制[17],其能够实现直流电压快速达到稳定,且功率因数高,能量可双向流动,无需制动回路。逆变器可采用多电平拓扑,以空间电压矢量控制或直接转矩控制作为控制策略,实现大容量推进电机的磁场定向控制,获得更优的调速性能,快速响应螺旋桨负载变化。实际航行时的海况复杂,会造成推进功率需求大范围、多模态波动,呈现多种功率特性。
1.2 船舶电力推进功率特性
船舶电力推进功率特性与航行海况和运行工况密切相关,推进功率波动可分为3 类[18],曲线见附录A图A2。
1)类型1:海浪兴波引起的功率波动[1]。在复杂海况下,海浪具有天然的波动特性,负载侧功率随其上下波动,周期从秒级到分钟级不等;在极端恶劣情况下,海浪使得螺旋桨反复进出水,会导致波动范围更剧烈。类型1 波动功率曲线如附录A 图A2(a)所示,功率波动甚至高达100%[18]。
2)类型2:螺旋桨旋转带来的功率波动[2]。该类型功率波动的频率通常较高(一般为桨叶频率(螺旋桨转速与桨叶数量之积)),曲线见附录A 图A2(a),其主要影响为引起机械损耗与电网频率波动等。
3)类型3:运行工况导致的功率波动[1]。在船舶启航时启动主推电机加速、船舶靠港时频繁调节侧推电机等运行工况下,推进电机的瞬时转矩峰值可达到额定转矩的1.5~2.0 倍,曲线如附录A 图A2(b)所示,极易损伤轴系,也会对电网频率与电压造成较大的冲击,其波动周期取决于对船舶实际的操作与控制。
2 大功率推进VSM控制方法
在不同的航行海况与运行工况下,变频器的控制策略由推进负载特性决定。以附录A 图A1(b)所示推进变频器拓扑为研究对象,在电网侧AC/DC接口处采用VSM 控制策略,发挥可控整流的控制能力,从而可将推进系统类比为同步电机,为电力推进负载提供虚拟惯性支撑,减弱来自负载侧的功率冲击。逆变侧采用异步电机矢量控制策略,通过dq0解耦将电流分为磁链分量与转矩分量进行控制,以获得良好的调速性能。
2.1 变频器整流侧VSM控制策略
整流侧VSM控制的转矩方程为:

式中:H为虚拟惯量常数;Pm为机械输入功率;Pe为电磁功率,一般为换流器端口的有功功率量测值;ω为VSM 的旋转角频率;ωref为额定角频率;D为阻尼系数;δ为电机转子角位移。
VSM的电磁方程为:

式中:L、R分别为换流器端口的滤波电感、电阻;uabc=[ua,ub,uc]T为机端三相电压,对应换流器的出口电压;eabc=[ea,eb,ec]T为电机的三相内电势;iabc=[ia,ib,ic]T为电机的三相电流。
1)有功功率调节。
VSM 既能为直流侧提供电能,也能响应系统的频率变化。可根据上级功率-频率控制单元计算得到机械输入功率Pm,由直流功率指令P0与频率偏差补偿指令ΔP两部分构成双下垂控制结构,如式(3)和式(4)所示。

式中:Udc、U*dc分别为直流电压的量测值、参考值,I*dc为直流电流的参考值;kp为电压环节的比例系数;f为变频器交流接口电压的频率;f0为电网的额定频率;kf为频率补偿比例系数。
输出电磁功率Pe一般为换流器端口的有功功率,如式(5)所示。

2)无功功率调节。
借鉴同步电机的励磁控制原理,通过调节VSM的内电势Ep来调节机端电压与无功功率。内电势Ep包含空载电势E0、无功功率偏差调节量ΔEQ与电压偏差调节量ΔEU三部分,如式(6)所示。

式中:Qref为无功功率参考值;Q为机端的无功功率;kQ为无功下垂系数;U、Uref分别为机端电压的实际值、参考值;kU为电压下垂系数。式(8)可看作同步电机的励磁控制器。
则式(2)中的三相内电势eabc可表示为:

由式(1)—(5)可见,VSM 控制通过引入虚拟惯量与阻尼,对换流器输出角频率与功角进行直接控制,使其动态过程存在惯性,从而抑制交流功率突变,减小负载功率的波动范围。变频器的控制框图见附录A 图A3。其中,整流侧VSM 控制策略框图见图A3(a),结合式(6)—(10)实现对机端电压与无功功率的控制,并根据式(2)计算得到电流参考值,然后经过dq0 电流解耦闭环控制保证内环电流对参考值的精确跟踪。
2.2 变频器逆变侧控制策略
对于变频器逆变部分而言,为了保证推进电机具有较好的调速性能与精确控制能力,采用被广泛认可的电机矢量控制策略[1-2],框图如附录A 图A3(b)所示。矢量控制通过Clark与Park变换将定子电流变换到合成磁链旋转参考坐标系下,并分解得到直轴电流分量im与交轴电流分量it,基于此计算转子磁链ψr和电磁转矩Te,分别如式(11)与式(12)所示。

式中:Lm、Lr分别为定转子互感、转子自感;Tr为转子时间常数。通过给定转子磁链与电磁转矩的参考值,与式(11)和式(12)构成闭环反馈,经过PI 环节得到电压参考值,从而控制逆变器的输出。
在对输出电流与电压进行矢量分解时,需要先得到磁场同步旋转坐标系的参考相角。根据异步电机的基本原理,电机磁场同步角频率ωsync与旋转角频率ω之差为转差率ωs,如式(13)所示。

综上所述,可建立推进变频器的控制策略。在控制策略设计中,选取合适的控制参数取值同样重要。逆变侧的矢量控制策略按照经典方法设计;但是对于整流侧的VSM 控制策略而言,鲜有针对功率波动抑制的相关设计方法,故本文建立VSM 变频器小信号模型,对参数变化的影响进行分析并给出合适的控制参数取值范围。
3 系统小信号建模与参数分析
3.1 VSM变频器小信号模型
3.1.1 有功功率内环小信号模型
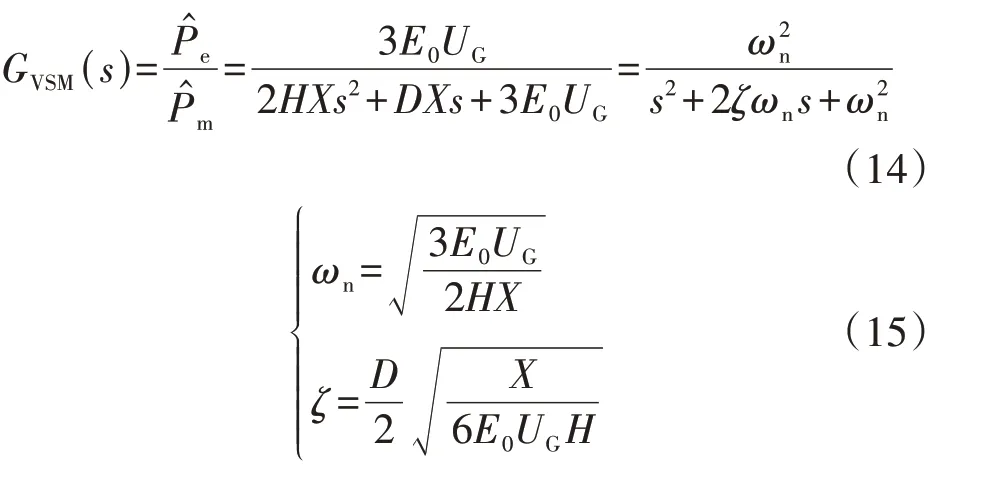
整流侧VSM 的有功功率内环一般为一个典型的二阶环节[16],其小信号模型为:

3.1.2 有功功率外环小信号模型
根据能量守恒定律,忽略换流器的寄生电阻,则直流电容的充电功率等于交流功率,放电功率约等于电机吸收功率,直流电压的变化体现了功率的暂态不平衡。因电压外环的存在,直流电压的响应将直接影响换流器的功率特性。因此,为了充分研究VSM 整流的功率特性,有必要在3.1.1 节的基础上,建立直流电压外环与有功功率之间的小信号模型。首先,对直流电容C进行建模,其充电电磁功率Pe与放电功率PL之间的关系为:

对式(16)进行线性化,建立直流电容的小信号模型如式(17)所示。


根据图2 可求得整流侧有功功率开环传递函数GP,o(s)、闭环传递函数GP,c(s)分别为:

图2 VSM有功功率外环的控制框图Fig.2 Control block diagram of VSM active power outer loop

式中:K=kp/C。
3.1.3 直流电压-有功功率小信号模型
变频器直流回路两侧的不平衡功率需要由直流电容通过充放电进行补偿,这将导致直流电压波动。对图2 进行整理,得到直流电压-有功功率控制框图如 图3 所 示,其 闭 环 传 递 函 数GDC,c(s) 如 式(20)所示。
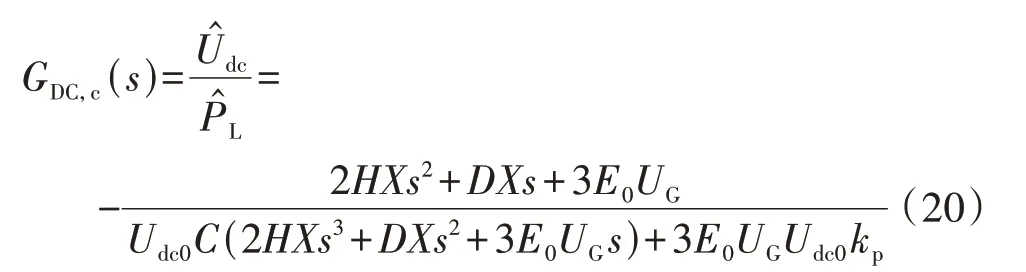

图3 直流电压-有功功率控制框图Fig.3 Control block diagram of DC voltage-active power
3.2 VSM控制参数分析
虚拟惯量常数H和阻尼系数D是VSM的关键控制参数。基于小信号模型,本节采用零极点分布与时域响应的方法,分析参数变化对系统响应与稳定性的影响,研究系统的动态性能。参考文献[19]设置直流电容的取值为30 mF。具体主电路参数取值见附录A表A1。
3.2.1 闭环零极点分析
基于表A1 所示主电路参数,虚拟惯量常数H从0.000 5 变化到0.05 的零极点轨迹如附录A 图A4(a)所示。由图可看出:系统有3 个特征根,包括1 个实根s1和2个共轭复根s2、s3;随着H的增大,3个特征根均逐步向右移动,表明系统的指数衰减分量减少,动态性能与稳定性变差;H的变化对共轭复根虚部的影响较小,系统振荡角频率基本不变,其主要受D取值的影响,D越大,则振荡角频率越小;随着H继续增大,s2与s3穿越虚轴,表明系统不稳定。
阻尼参数D从0.1 变化到10 的零极点轨迹如附录A 图A4(b)所示。由图可看出:随着D的增大,实根s1逐渐远离虚轴,表明系统的衰减分量增加,系统动态性能更好;若H取值较小,例如图中H=0.000 5,则2 个共轭复根首先汇入实轴,然后在实轴上某点分离,向虚轴靠近;若H取值较大,则D在某一范围内取值时系统的稳定性较好,在其他条件下的稳定性较差;H越大,则共轭复根越靠近虚轴,表明系统振荡角频率越小,动态性能越差。
3.2.2 时域响应分析
基于表A1所示主电路参数,选取虚拟惯量常数H的取值为0.0005、0.0015、0.0025,阻尼系数D的取值为1、3、5。单位冲激响应下系统交流功率与直流电压的响应曲线分别见附录A图A5和图A6。
基于单位冲激输入,可以近似得到VSM 整流器在冲击功率输入下的系统响应规律。由图A5(a)和图A6(a)可知,H的增大对系统振荡角频率的影响较小,但是功率与直流电压的振荡幅值略有增加,对应于3.2.1 节中特征根的实部逐渐减小的结论。由图A5(b)可知,随着D的增大,功率响应峰值降低,功率冲击得到有效的抑制,但是随着振荡过程的进行,振荡角频率减小,对应于3.2.1 节中特征根的实部向左变化,共轭复根向实轴靠近的结论。由图A6(b)可知,随着D的增大,直流电压的振荡幅值增加,振荡过程变长,产生了不利的影响。需要指出的是,由于时域响应分析中的系统输入为单位冲激信号,直流电压的跌落深度不变,而实际运行中不存在这一极端情况,电压的跌落深度同样会受到控制参数的影响。
3.3 控制参数设计
根据上述分析可知,采用VSM 整流后,电网侧有功功率响应较慢,从0 开始缓慢增大,直流电压暂时性跌落,具有利用直流电容储能抑制负载侧对电网冲击的能力。但是,H与D的取值会对系统的稳定性与整流器的功率响应特性产生影响。冲击功率的抑制效果与直流电压的稳定性也是相互矛盾的。因此,在系统稳定的前提下,需要根据功率抑制需求与直流电压的允许波动范围对H与D的取值进行选取,同时要尽可能地减少系统振荡,保证系统的动态性能。
由图A4—A6 可知:虚拟惯量常数H的增大可使交流频率惯性增大,但是H过大会降低系统的稳定裕度,使得功率与直流电压的振荡加剧,因此H的取值不宜过大;阻尼系数D的增大可以有效增强冲击功率的抑制效果,但是会令直流电压偏差增大,加剧功率与直流电压的振荡过程。此外,还应根据直流电压的允许偏差范围对D取值进行选取,以保证在变频器安全运行范围内尽可能地抑制对电网的冲击功率。
4 仿真与试验
在PSCAD/EMTDC 和RT-LAB 硬件在环平台中进行仿真与试验。船舶综合电力系统由船舶电站、变频装置、推进电机与螺旋桨组成。其中,船舶电站由5台柴油发电机并列构成,负载由2台额定转速为120 r/min 的电力推进系统构成。综合电力系统的参数如附录A 表A1 和表A2 所示。螺旋桨的建模参考文献[18],参数见附录A 表A3。根据3.3 节设计控制参数,为了减少系统振荡,选取虚拟惯量常数H=0.0015,同时选取阻尼系数D=2,使得功率冲击得到抑制的同时,系统振荡分量能够快速衰减。
4.1 船舶运行工况仿真与比较
在3 s 时启动推进电机,设定转速为0.3 p.u.,在4 s时提高转速为0.6 p.u.,模拟突拉转速紧急启航的过程,该过程的功率波动曲线如附录A 图A2(b)所示。在6 s 时瞬时减速,设定转速为0.3 p.u.,以模拟突然减速的运行工况。分别对采用VSM 控制策略与Udc-Q控制策略的变频器进行仿真,结果如图4所示。图中:Pac、Pdc分别为电网侧功率、逆变侧输出功率;ωM为电机转速标幺值;U*min为低电压限值,取值为3.15 kV。
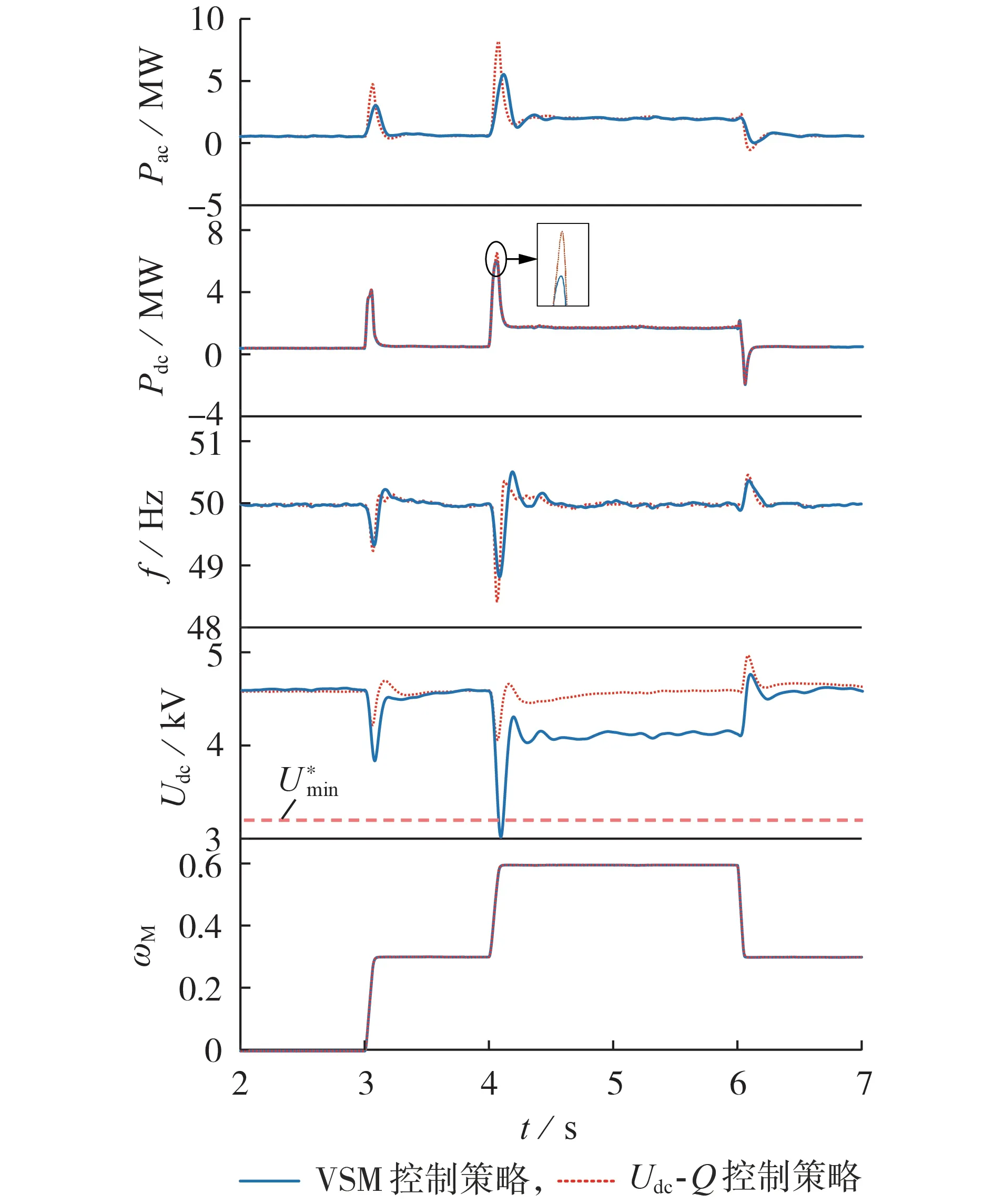
图4 不同控制策略下的仿真结果Fig.4 Simulative results under different control strategies
由图可知,相较于传统的Udc-Q控制策略,当整流侧采用VSM 控制策略时,变频器能够在一定程度上抑制交流功率冲击,减小系统频率跌落。在推进电机的多次调速动作下,电力推进系统对船舶电网产生大幅功率需求与冲击:在3 s 与4 s 时的加速动作令推进电机在0.1 s 时间内分别达到4、6 MW 的峰值功率,而在6 s时的突然减速动作使功率需求迅速降低至0 以下,电机进入第四象限运行状态。当采用Udc-Q控制策略时,由于损耗等原因,交流功率峰值会大于推进电机的功率峰值,3 s 与4 s 时的功率峰值分别在0.1 s时间内达到4.75、8.21 MW,6 s后突发跌落至-0.5 MW,这导致系统频率相应跌落与波动,在4 s 调速动作发生后跌落至48.4 Hz。当采用VSM 控制策略时,3 s 与4 s 时达到峰值功率,分别为3.04、5.53 MW,相比Udc-Q控制策略分别减小了36.0%、32.6%,6 s 时的功率突降至-0.02 MW,且交流功率变化显著放缓,频率跌落的最低值也提高至48.85 Hz。
相比于Udc-Q控制策略,在VSM 控制策略下直流电压的跌落在一定程度上有加深,且由于采用比例调节,系统在高功率时的直流电压稳态值会低于额定值。受限于电容的容量,面对较大功率冲击时直流电压易发生深度跌落。过低的直流电压可能会影响逆变器的正常运行,也可能触发变频器低压告警,从而闭锁逆变器[20]。在4 s时,由于逆变侧负载冲击功率过大,导致直流电压跌落深度达到3.04 kV,低于,对应Pdc中VSM 整流的逆变侧输出功率峰值降低,对逆变器的正常运行产生了一定的影响。其余时间内直流电压的跌落幅度有限,未造成推进功率限幅。采用VSM 整流前、后推进电机的转速曲线基本一致,逆变侧采用的矢量控制策略能够隔离直流电压的波动,不影响推进器的调速性能。但仍需注意合理选取VSM 参数的取值,避免直流电压发生深度跌落,影响变频器的正常运行。
4.2 海浪工况模拟仿真
在推进电机加速至0.4 p.u.并进入稳态后,于2 s时接入模拟海浪兴波与螺旋桨旋转引起的波动负载。其中海浪兴波引起的波动负载的周期为4 s,幅值为额定转矩的50%;螺旋桨旋转引起的波动负载的周期为0.05 s,幅值为额定转矩的10%。仿真结果如附录A 图A7所示。由图可以看出:对于由快速变化的海浪与螺旋桨旋转产生的推进功率波动而言,VSM控制策略能够实现较好的抑制效果,将最大幅值为1.4 MW 的快速波动抑制至0.3 MW,有效避免了发电机频繁地响应调节;而直流电压的波动范围为3.69~5.02 kV,处于允许范围之内。
4.3 参数变化的仿真与分析
本节主要分析VSM控制参数变化后对变频器的影响。在VSM控制参数中,选取H的取值为0.0005、0.001 5、0.002 5,D的取值为1、3、5,设定电压环节的比例系数kp为5,仿真分析不同参数对系统响应的影响。在2 s 时启动推进电机,设定转速为0.4 p.u.,此时推进系统突拉转速,逆变侧将产生大额功率需求。参数变化对变频器有功功率与直流电压的影响结果如附录A 图A8 所示。由图A8(a)可知,当H不变而D变化时,随着D增大,有功功率的峰值降低,直流电压的跌落深度增加,调整时间变长,振荡频率减小。上述结果表明功率波动的抑制效果与直流电压的稳定性之间存在矛盾关系,这与3.2节的理论分析结论相符。由图A8(b)可知,当D不变而H变化时,随着H的增大,有功功率波动与直流电压波动加剧,但是调整时间与振荡频率基本不变,可见H变化对系统响应的影响并不大。
4.4 响应系统频率仿真
系统进入稳态后,5 s时在交流母线处投入3 MW负载,7 s 时断开该负载,作为模拟系统中频率变化的引发事件。因VSM 整流频率补偿环节的作用,变频器能够响应上述频率变化,主动降低或增加变频器的输入功率。仿真结果如附录A 图A9 所示。由图可知:在5 s 时系统频率从50.0 Hz 跌落至49.6 Hz左右,VSM整流的输出功率随之降低,从稳态2.0 MW降低至1.2 MW,直流电压也相应地减小;随着系统频率的逐渐恢复,直流电压回升,变频器吸收的功率在逐渐恢复的同时,也需要额外补偿直流电压跌落所损失的能量,因此会产生一定的超调;7 s 时系统频率突然上升,变频器同样能够对该事件做出响应;在变化的全过程中变频器的输出功率基本没有发生变化,推进系统的正常运行并未受到影响。
4.5 硬件在环试验
为了充分验证本文所提控制策略的有效性,在硬件在环试验平台中对其进行试验验证。搭建的试验平台主要包括计算机、RT-LAB OP5700 硬件模拟仿真平台、Tektronix MSO44 示波器、型号为XILINX FPGA ZYNQ7020 的现场可编程门阵列开发板作为控制器件以及最大采样频率为200 kHz 的AN706模块作为控制器采样模块。基于仿真参数搭建模型,利用示波器观察控制效果。硬件在环试验平台如附录A图A10所示,试验结果如图5所示。
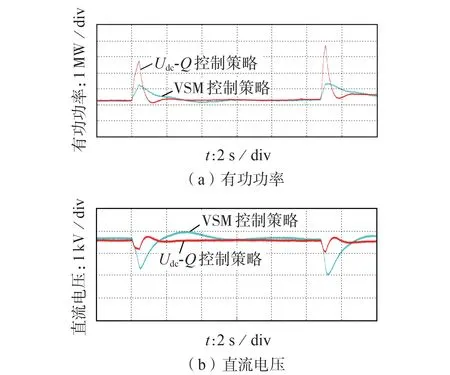
图5 不同控制策略下的试验结果Fig.5 Experimental results under different control strategies
由图5(a)可知,4 s 与15 s 时负载功率需求突增后,相较于Udc-Q控制策略,VSM 控制策略下的交流侧有功功率峰值得到了显著降低,峰值从7 MW 降低为3 MW 左右。由图5(b)可知,采用VSM 控制策略时,直流电压跌落最低值为3 kV,而Udc-Q控制策略下的直流电压跌落最低值为4.2 kV。试验结果同样表明本文所提控制策略能够利用直流电容储能平抑负载功率冲击。
5 结论
针对复杂海况与工况下电力推进对电网造成大幅功率冲击的难题,本文提出了船舶电力变频推进VSM 控制方法,通过将整流侧的VSM 控制与逆变侧的矢量控制相结合,为船舶电力推进变频装置增加虚拟惯量,在不增加额外设备的前提下平抑功率波动。建立了考虑直流电容特性的小信号模型,分析了控制参数对系统稳定性、交流功率与直流电压响应的影响,综合考虑冲击功率的抑制能力与动态性能,给出了VSM 关键控制参数的设计方法。PSCAD/EMTDC 仿真与RT-LAB半实物仿真验证了所提控制策略的有效性,可为大型舰船电力推进系统的设计和开发提供参考与借鉴。
附录见本刊网络版(http://www.epae.cn)。