基于等效杆件法的超冗余机器人规划仿真研究
2022-11-19王伟霖王成疆贾利慧张鲁杨刘力源李玉胜牟宗高
王伟霖,王成疆,贾利慧 ,张鲁杨 ,刘力源,李玉胜,牟宗高,3
(1.山东理工大学 机械工程学院,山东 淄博 255000;2.深圳市先进智能技术研究所,广东 深圳 518055;3.哈尔滨工业大学(深圳) 机电工程与自动化学院,广东 深圳 518055)
0 引言
相比于传统的工业机器人,超冗余机器人具有更多的自由度、更纤细的工作臂杆和更灵巧的运动方式,因此超冗余机器人在狭小的工作环境表现出更优越的适应性和相容性。近年来,超冗余机器人得到了国内外专家学者的深入研究,并被广泛应用于狭小空间的作业任务[1],例如:大型航天器设备的检测维修、核电站废墟环境的探生救援及狭小腔道环境的微创手术等。东京工业大学研制了一种包含9自由度的超冗余机器人[2],该超冗余机器人不仅可以实现绕基座的转动及在空间的运动,而且可以发挥其拥有较多自由度的优势,灵活的避开工作范围内的多障碍物到达指定的空间位置,如图1所示。美国国防部高级研究计划局提出的“凤凰计划”[3]中提出了开发下一代高灵巧性机器人的发展方向。该类超冗余机器人将具备照明和摄像等功能同时也将具有较大的工作空间以及障碍物回避等能力,如图2所示。日本国家信息和通信技术研究中心提出了轨道维护系统的概念[4],该系统将完成对通信卫星的检修以及空间碎片的清理等工作,如图3所示。OC Robotics 公司推出了一种典型的超冗余机器人-型号II-X125[5]。该机器人臂杆直径为125 mm,可在核电站等危险的狭小空间代替人类开展切割/焊接等作业任务。哈尔滨工业大学设计了一套应用于核电站狭小空间探测的超冗余机器人[6, 7]。该机器人有18个自由度可以灵活的进入狭小空间执行视频检测任务。香港中文大学设计了一款应用于微创手术的绳索驱动机器人[8, 9]。该机器人具有紧凑的结构,相对于连续型机器人具有更好的定位精度,实验中末端定位误差小于4%。

图1 超冗余机器人灵巧运动

图2 超冗余机器人在轨照明

图3 超冗余机器人在轨维护

图4 超冗余机器人切割/焊接作业

图5 超冗余机器人视觉检测作业

图6 超冗余机器人微创手术应用
然而,由于大量自由度的存在,超冗余机器人的运动学逆解及轨迹规划将十分复杂,因此运动学逆解及轨迹规划也成为超冗余机器人研究中的热点[10-13]。Chirikjian 首先提出了脊线表征超冗余机器人宏观构型的思想[14],当超冗余机器人宏观构型确定后,就可以依次确定每个关节的角度。Sunil 提出了使用圆弧表征超冗余机器人构型的思路[15]。Samer 提出了一种从超冗余机器人无穷多解中确定唯一解的几何法[16],由于该方法设定相邻关节角度相等,因此可以有效避免内部奇异。为了实现超冗余机器人的避障规划,Freund提出了一种在线避障规划方法[17],该方法使用了二次凸优化理论实现超冗余机器人的避障优化。Mayorga 提出了实现超冗余机器人避障的几何包围法[18],该方法通过计算零空间及与障碍物包络的距离简单有效的实现了避障规划目标。Mu等提出了使用超二次曲面方程建立障碍物模型,为冗余机器人避障规划提供判据的思路[19, 20],该方法实现了冗余机器人的在三维环境下多障碍物的避障规划。Xu提出了应用等效模式函数法求解超冗余机器人逆运动学的思路[21],该方法在避障方面具有较高的灵巧度,但在求解逆运动学时具有较高的复杂度。Mu提出了分段几何法求解超冗余机器人的逆运动学的思路[6],该方法提高了逆运动学的求解效率,但在避障规划中机器人的肘部只有四种构型可供选择,降低了超冗余机器人的灵巧性。
目前,在避障规划研究中为了获得障碍物回避的高效性,在障碍物建模方面通常采用圆或球等简单几何模型包络障碍物。而在避障算法优化方面还需要进一步研究超冗余机器人的逆运动学求解及轨迹规划问题。针对以上问题,本文提出了应用等效杆件法求解超冗余机器人的逆运动学及避障轨迹规划问题的思路。该方法根据超冗余机器人避障规划的特点将超冗余的机器人逐次等效为低冗余或非冗余的机器人,从而降低了避障规划的求解复杂度,提高了避障规划效率。本文首先介绍了等效杆件法的基本原理,并以二连杆等效杆件法为例介绍超冗余机器人的避障规划方法。然后基于Webots建立超冗余机器人的仿真系统验,证二连杆等效杆件法避障规划算法。最后总结全文并给出结论。
1 等效杆件法逆运动学及避障规划
一般情况下,障碍物都具有不规则的几何形状。本文针对平面障碍物,采用圆包络的方法进行描述。这种方法不仅建模简单而且可以适度扩大障碍物的空间,从而提高避障规划的计算效率及机器人运动路径的安全度,如图7所示。为了降低设计复杂程度,采用模块化思想设计超冗余机器人,使每个杆件的长度都是一致的。在传统几何法[16]中相邻杆件之间的夹角均设定为相同,能有效避免相邻连杆件共线的问题,因而体现出良好的避免内部奇异性。基于超冗余机器人的特点,本文提出了等效杆件法逆运动学及避障规划策略。在超冗余机器人的逆运动学求解方面可以将等效杆件法划分为二连杆等效杆件法和三连杆等效杆件法,如图8所示。二连杆等效杆件法(如图 8虚线所示,n为超冗余机器人自由度,本文设定n=6)是以两个连杆为等效单位,将n自由度的机器人划分为(n/2)个等效杆件。同理,三连杆等效杆件法(如图8双点线所示)是以三个连杆为等效单位,将n自由度的机器人划分为(n/3)个等效杆件。在逆运动学求解时,基于等效杆件法可以将超冗余的机器人逐次等效为低冗余或非冗余的机器人,从而降低超冗余机器人的逆运动学的难度。在超冗余机器人的避障规划方面则将基于等效杆件法等效后的低冗余或非冗余机器人与障碍物的笛卡尔距离作为避障判据,通过判断等效后的低冗余或非冗余机器人与障碍物的距离大小就可以判断原超冗余机器人与障碍物的位置关系。因此,等效杆件法可以降低避障规划的求解复杂度、提高了避障规划的效率。

图7 机器人及障碍物模型
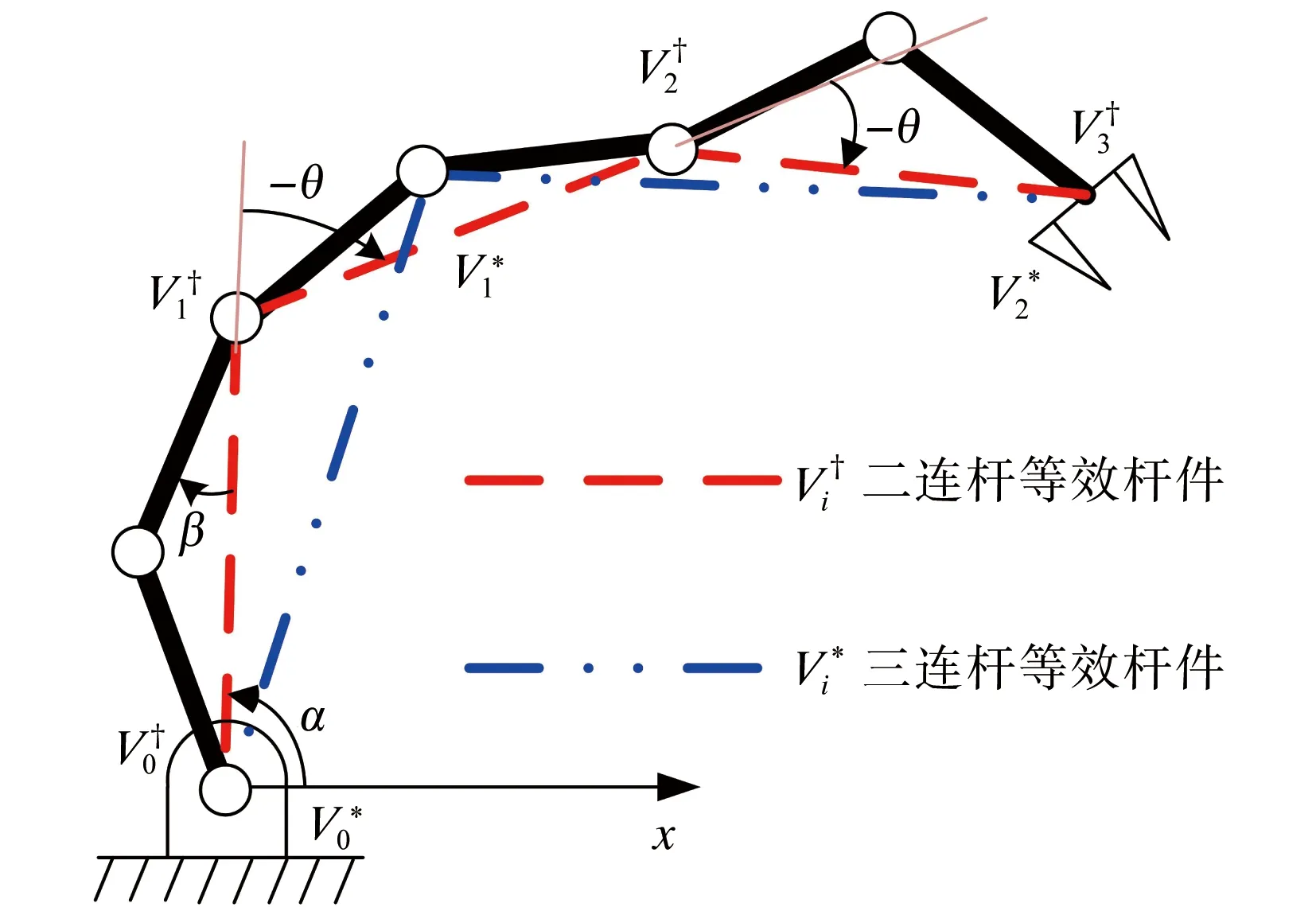
图8 等效杆件法示意图


(1)
其中L为等效杆件的杆长,其值通过(2)式计算
L=2l0cosβ。
(2)
显然,当给定机器人与等效杆件之间的夹角β,依据分式(1)则可得出一组唯一确定的α和θ的解,从而得出了等效杆件组的关节角度。进一步,可以依据公式(3)求得超冗余机器人各个关节的角度。
(3)
对于超冗余机器人在障碍物环境中工作,还需要研究的一个重要指标是其工作空间。工作空间由超冗余机器人的自由度数目、关节角度极限和杆件长度共同决定。通常应用蒙特卡罗法绘制机器人的工作空间。根据公式(1)可知,末端执行器的位置是关节角度的函数,可以简写为
(4)
其中关节角度满足θmin≤θi≤θmax,(i=1,2,…,6,θmin=-85,θmax=85)。对每个关节变量,在其规定的范围内,随机抽取500个值可得具体参数
θi=θmin+(θmax-θmin)×RAND(500,1),
(5)
则应用蒙特卡罗法,对所有角度组合,采用循环(多重循环)语句依次将各关节变量值组合代入运动学正解方程,绘制工作空间如图9所示。

图9 超冗余机器人工作空间
在工作空间范围内,则可以确定超冗余机器人每个杆件的位置。并通过判断杆件所在线段与障碍物包络圆交点是否存在,作为确定杆件是否会与障碍物发生碰撞的判据。当会发生碰撞时,则改变机器人与虚拟杆件的夹角β,从而改变机器人的姿态来实现避障,其具体算法流程如图10所示。

图10 障碍物避障算法流程图
2 基于Webots的仿真验证
2.1 仿真系统架构
Webots可以实现对机器人和环境进行建模,并能够进行编程、控制和仿真。在Webots软件中,用户可以快速创建三维虚拟环境,并赋予环境及环境中物体相应的物理属性,如光照强度、颜色、形状、质量、摩擦系数等,从而实现十分接近地模拟机器人现实的工作环境。Webots软件界面包含4个主要的窗口:场景树、三维窗口、代码区和控制台。在这些窗口中分别可以实现建模、显示、编程和仿真等功能。图11为仿真平台搭建的基本流程。本文采用MATLAB语言编写控制程序。将规划好的关节角度数据储存于txt文档中,在运行程序时通过textread函数读取关节角度数据;另外通过wb_robot_get_device函数获取设备标签,并通过Webots中名称为wb_motor_set_position的函数设置电机对应的关节角度,在每设置完一组电机关节角度之后,采用wb_robot_step函数实现控制台和仿真窗口之间数据的更新,搭建完成的Webots仿真模型如图12所示。为了验证模型的适用性,首先规划出超冗余机器人末端运动的圆轨迹及对应关节角度,然后使用关节角度控制超冗余机器人运动,通过Webots系统传感器获得超冗余机器人末端的位置数据。分别绘制期望末端位置和实际末端位置如图13所示。图中虚线为规划的末端轨迹圆,实线为传感器测得的末端轨迹圆。实线与虚线具有较好的重合度,说明了超冗余机器人Webots仿真系统的适用性。
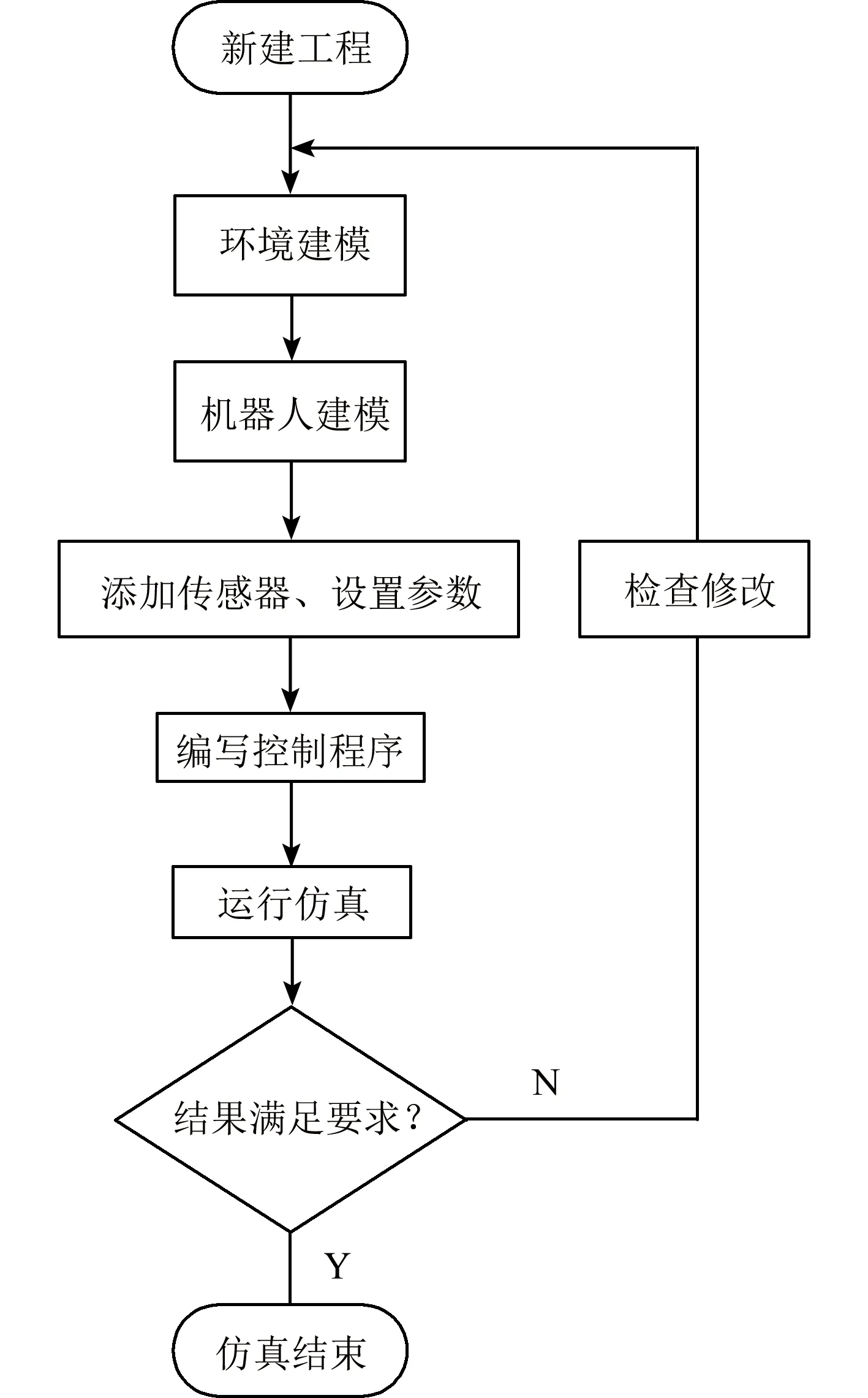
图11 仿真平台搭建流程

图12 超冗余机器人Webots仿真模型

图13 末端圆运动轨迹
2.2 避障运动仿真
本文基于建立的超冗余机器人Webots仿真模型验证提出的等效杆件法避障规划方法。当存在障碍物时,需要提前判断超冗余机器人运动的下一个构型是否会与障碍物发生碰撞。如果判断出超冗余机器人的下一个构型有碰撞则需要重新选择一组满足要求的构型角度。本文基于提出的等效杆件法避障算法规划合理的避障轨迹,在Webots仿真系统中验证所规划路径的有效性。
在单障碍物避障规划仿真中,设定超冗余机器人与障碍物之间的相对位置关系如图14所示。超冗余机器人在灵活地避开单障碍物的同时沿着规划的末端轨迹到达了期望位置。

图14 单障碍物避障规划仿真
在多障碍物避障规划仿真中增加障碍物的数量同时改变障碍物与超冗余机器人的相对位置,具体末端的运动轨迹和多障碍物的分布如图15所示,从图16的运动轨迹可看出机器人末端按照规划的“直线—圆弧—直线”的路径进行运动,并且轨迹在虚线圆外部。超冗余机器人的末端及臂杆不与障碍物发生碰撞,证明了所提出的等效杆件法对超冗余机器人回避工作空间内障碍物的有效性。

图15 多障碍物位置及末端轨迹

图16 多障碍物避障规划仿真
3 结论
本文提出的等效杆件法解决了超冗余机器人的逆运动学及避障轨迹规划问题。该方法的主要思想是将超冗余的机器人等效为低冗余或非冗余的机器人;然后,根据在工作空间内障碍物的特点将不规则的障碍物使用圆进行包络,通过判断包络圆与等效机器人的相交点个数判断是否发生碰撞,根据碰撞的判断结果调整超冗余机器人的运动构型,从而降低了避障规划的求解复杂度并且提高了避障规划的效率。为了验证方法的有效性,本文基于Webots实现了对超冗余机器人和环境的建模,基于等效杆件法完成了超冗余机器人回避多障碍物的编程控制和系统仿真。仿真结果证明了所提出的等效杆件法对超冗余机器人回避工作空间中障碍物的有效性。