地下车库智能照明控制系统的设计
2022-11-18李镇江韩成浩
李镇江,韩成浩
吉林建筑大学 电气与计算机学院,长春 130118
0 引言
近年来,我国综合国力大幅度提升,生活水平也在逐年提高.全国拥有汽车的人数直线上升,这增加了地下车库的使用数量,导致地下车库建筑面积扩大的同时也加大了地下车库照明系统能源的浪费.目前,大城市地下车库普遍采用24 h照明,这导致能源浪费.据统计,不应作为必要支出的“无用照明”耗损电能高达60 %左右,给我国能源产业带来极大压力.绿色节能、降低损耗的行动刻不容缓,是时候为地下停车场电能损耗做做“减法”了[1].上世纪90年代,人们用的都是声控日光灯,由于该方式容易受外界噪声影响,厂商为满足市场需求,研发出红外感应日光灯,解决了声控的缺陷与不足.但因红外线感应容易受到温度的影响,信号在传输中容易产生衰减,影响正常接收距离.现如今雷达传感器应运而生,其检测精度很高且能够在多种复杂条件下工作,可实现多车道检测.基于此传感器,设计一款智能化、节能化、灵活化、维护方便的照明系统,不失为切实降低车库无效能耗的方法之一,也是实现“按需照明”的必然方向.
1 系统的总体设计概述
本设计以STM32F103系列单片机为主控制器,并且与雷达传感器相结合实时监测车库动态环境.主控制器将传感器得到的数据传送给系统控制中心,同时对数据进行处理,然后向照明设备控制器发送相应调节亮度的命令,从而实现车库照明系统亮度的自动调节,达到节约能耗的目的.系统在未出现紧急状况时是良好的照明设备,智能照明控制系统依据车辆位置与探测器之间的不同距离进行精确调节亮度,设置实现节能.即时控制模式开启时,车库全部灯光打开,在发生紧急状况时可以让车辆及人员在最短的时间内判断出正确的逃生方向.图1为系统两种控制方式.

图1 系统两种控制方式Fig.1 Two control modes of the system
2 系统硬件设计
控制系统正常工作的运行环境离不开硬件设计的搭建,按照控制系统硬件部分设计方案,系统将采用以Cortex-M3核心的STM32F103系列单片机为主要控制器.其是一种资源充足、便于推广的高性能嵌入式处理器,并在此基础上,添加多个外设连接电路以构成完整硬件体系.STM32F103最小系统原理图如图2所示.

图2 STM32F103最小系统原理图Fig.2 Schematic diagram of STM32F103 minimum system
照明及节能控制系统主要由主控制模块、电源模块、雷达技术探测器模块、LED驱动模块以及屏幕显示模块等构成.图3为系统总设计框图.
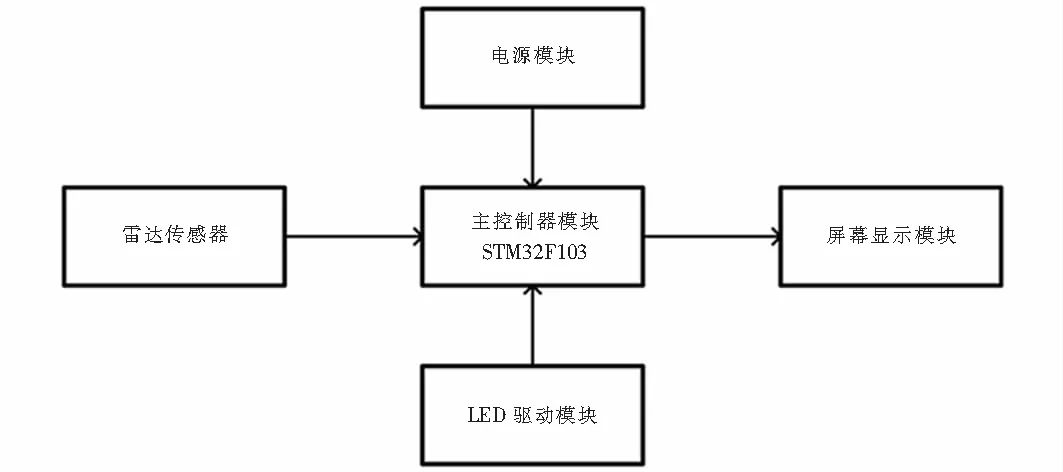
图3 系统总设计框图Fig.3 System general design block diagram
2.1 主控制器
主控制器是硬件系统的大脑,系统的稳定性、可靠性与其密切相关,负责所有数据采集、运算、通信等任务.本设计采用体STM32F103型号单片机作为主控制器,相比较于普通51单片机,其工作温度范围广,速度也比51单片机快,且程序模块化,接口相对简单,是一款大容量的通用单片机,具有外设资源丰富,性价比高,低功耗等优点[2].其功能特性见表1.

表1 STM32F103功能特性Table 1 Functions and features of STM32F103
2.2 雷达传感器
雷达数据传感器的主要功能是为了监测车库内车辆和人员的流动状况,并通过对测得的数据进行处理后,对LED灯具实现调亮功能.本次设计采用K波段多普勒雷达传感器,它以非接触方法检测汽车和人的运动情况,对所获得的数据进行处理并分析,进而形成相关的灯光控制信号.该产品抗干扰能力强,且不受高温、潮湿、光照、灰尘等的影响,对于运动检测灵敏度高,漏识、误识概率较低,完全可以适应车库的环境条件.
2.3 调光方式
现阶段研究常用的调光方式有两种,即可控硅调光及PWM调光.可控硅调光的原理是调节交流电的导通角,改变其正弦波形,从而对交流电流有效值的调节,达到调光的目的,其缺点是会导致系统调光范围变小,且调光性能比较差.另外,由于可控硅具有半控开关的属性,其功能的实现仅能完成对电流的开启,无法完全关断电流,故不能达到节能的效果.
脉宽调制(PWM)本质是利用数字信号调节和控制模拟电路,可以大幅度降低系统的成本和功耗.在该种控制原理下,实验过程中的任何时刻,满幅值的直流电流只有两种存在形式,非百分百存在即完全不存在.占空比是负载或电路开启的时间与负载或电路关闭的时间之比,占空比为10 %的信号在10 %的时间内处于开启状态,在其他90 %的时间内关闭.
图4为不同占空比下的波形图.在自动控制模式下,当车辆及人员接近探测器时,系统会随着距离的由远及近再到渐渐远去,对LED灯进行实时调整亮度,由关到开再由暗变亮.合理调节光源开启与关闭的时间,从而高效调整灯具的亮度,达到节能的效果.

图4 不同占空比下的波形图Fig.4 Waveform under different duty cycles
2.4 LED驱动
本设计系统中选择用Supertex公司的HV9910的通用LED驱动器完成对LED灯的照明驱动以及亮度调节.通过STM32F103产生相应的PWM信号,调节系统电路占空比,从而达到对LED输出的改变、使其在0 %~100 %之间变化[3],而其当前频率下的占空比则会影响此方法的调光精度.为保障LED的闪烁不会轻易被人眼察觉,通常情况下选择大于100 Hz的开关频率.对主控制器进行编程,可以实现输出可调频率的方波,这个方波信号经过滤波,加载在HV9910的PWM输入引脚,就可以实现对LED灯亮度的数字调光.图3为芯片内部结构图.
2.5 电源
驱动电源电路的功能是对系统整体硬件电路进行供电.电源模块的重要性主要体现在提供系统的稳定运行所需的工作电压,保证系统的核心控制器、各部分传感器以及LED等元件得正常使用[4].由于本文大部分芯片需要稳定的3.3 V电压,同时还有一些模块的工作电压为5 V.为了满足不同器件工作电压不同的要求,利用变压器、整流桥和滤波电容完成对电压的转换,将现有的220 V市电转换为工作所需的稳定的5 V直流电,相应的变压工作则由一款正向低压降稳压器SC662K-3.3 V的电压转换芯片完成.该芯片不仅能够提供3.3V电压输出,内部还具有温度保护电路以及限流整流电路,能够保证供电的高精度性及高稳定性,是如今供电芯片的最佳选择.
3 系统软件设计
在整个地下车库照明节能系统的设计当中,各个
硬件接口的驱动多是通过软件程序实现操作的,软件是控制系统的重要组成部分.智能照明系统主程序设计流程如图5所示.
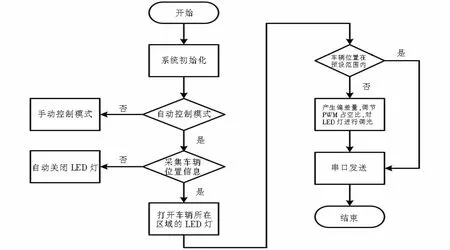
图5 主程序流程Fig.5 Flowchart of the main program
3.1 上位机设计
本次设计的上位机远程控制端界面由USART UMI软件进行编写,通过虚拟界面的设计来显示当前的系统的工作状态.为方便工作人员操作该智能系统,设计的PC端上位机界面简洁、易操作,界面分为两个部分,分别是状态控制、灯具显示,每盏灯可以分别显示亮或不亮.工作人员可根据上位机控制界面,切换照明控制的状态,如“自动控制”、“手动点亮”等.其效果如图6、图7所示.

图6 自动控制效果Fig.6 Automatic control effect diagram

图7 手动点亮效果Fig.7 Manual lighting effect diagram
4 用电能耗分析
以某高校地下停车场为例,车库内共计50盏灯具,均为T5型荧光灯,照明时间从6∶00~10∶00,共16 h.根据此学校办公上班时间,设定车库照明全开时间按7∶00~9∶00,11∶00~12∶00,16∶00~18∶00计,共5 h,其余时间采用本系统照明,共19 h,以便进行能耗分析比较.通过所列出的各项条件,地下车库采用T5荧光灯和雷达感应LED灯方案年能耗分析见表2.

表2 能耗对比Table 2 Energy consumption comparison
由表2所示,雷达感应LED灯照明和原T5荧光灯照明相两种照明方式,在相同的地下车库条件下,前者节电率可达76.1 %.其原因主要为:① LED灯功率比荧光灯功率低;② 由于应用了雷达感应 LED 灯控制方式,在满足该车库的照明要求的前提下,同时照明系统将能在合适的时间开启、关闭,在开启时能够根据检测到的不同信息,执行不同模式,实现智能化控制,保证车内人员驾车行驶的正常视野,不影响行车安全,同时最大限度地节约能源.与传统荧光灯照明方式相比,大幅度降低了照明时间,减少了能源浪费.
5 结语
在加快实施节能环保、循环经济的时代背景下,国家对节约能源、绿色环保提出了更高的要求.基于人们对智能化生活的向往,依托于智能控制的节能照明时代必将飞速到来.地下停车库由于其特殊的功能需求,采用智能化节能照明系统能切实解决地下停车库照明痛点,做到车(人)来灯亮、车(人)走灯暗[5],使地下车库在符合相关照明标准的基础上,大幅度降低照明能耗,进而缩减物业维护和管理成本,满足节能减排政策要求的同时实现“按需照明”.
