装配式车辆段盖板架设装备方案及关键技术研究
2022-11-18原贞华
原贞华
中铁工程机械研究设计院有限公司 武汉 430066
0 引言
装配化建筑因其效率高、绿色节能以及标准化设计施工、信息化管理等优势日益成为建筑工业的发展趋势。国外发达国家建筑工业体系发展较为成熟,利用工业化生产方式建造了大量的预制型装配式建筑产品,广泛应用于工业与民用建筑。我国装配式建筑起步于20世纪50年代,较长一段时间都处于向前苏联学习工业化的阶段,发展较为滞缓。近年来,随着装配式建筑的优点得到越来越多人的重视,在国家发改委、住建部等部门的转型和改革下,加快推动了建筑工业化,在部分城市积极出台了推进装配式建筑的指导性政策和建议。
目前,地铁车辆段因其施工环境复杂,结构形式多变,在国内外暂无相关的装配化完工案例。地铁车辆段主要结构形式由立柱、盖板构件组成,其中盖板构件又分为纵梁、横梁及节点等,如图1所示。通过分析车辆段的特点,采用立柱现浇,盖板结构(纵梁及梁片),装配化施工方式使得现场施工和厂内施工能同步推进,极大地缩短了整个车辆段的建设周期,该施工方式的特点为:1)底板、盖板上因不同的功能存在各种高低台阶以及镂空孔洞等;2)纵梁、横梁规格多样,且在局部位置的梁片姿态各不相同;3)立柱间距不等;4)盖板构件载荷承载能力较小;5)现场施工工序较多,不仅存在装配工序,还存在现浇、土方开挖以及后续的铺轨、电装等工序;6)现场施工中存在有塔式起重机(以下简称塔机)等其他建造设备。
1 项目技术难点
针对装配化车辆段的相关特点,施工存在的技术难点包括:
1)装配施工工法的确定 现场施工存在土方开挖、底板,叠合层现浇以及后期的铺轨、电装等多个工序。为了整体的建设周期得以最大限度地缩短,提高效率,需盖板装配施工和上述工序同时展开,施工过程中相互之间不能有较大冲突。故装配施工工法的确定要综合考虑上述特点。
2)施工设备行走灵活性需求 车辆段整体区域面积横向600 m、纵向250 m,车辆段底板以及盖板上存在各种台阶、镂空等状况,具体如图2、图3所示。因此,需要施工设备具有较强的灵活性,不仅可以横向、纵向走行,且需具备过坎、过镂空的能力。
3)施工载荷的控制 梁片的承载有限,以广州某车辆段为例,单片梁片的最大承载不得超过50 t,如何使设备在架梁过程中的载荷不超过梁片的允许承载是关系到整个施工工法、施工设备可行性最重要的决定性因素。
4)吊具的适应性 每列梁片的长度不一致,长度范围2.5 ~18 m,共有200多种各种规格的梁片,且梁片的摆放也不相同,故需要吊具具有很好的适应性。
5)施工设备的配合协调性 现场存在塔机等施工设备,如何尽可能减少与塔机等施工设备的相互影响是关系到整个施工效率的关键性因素。
2 总体方案和作业原理
2.1 装配化施工工法
不同于以往铁路桥梁的线性施工,车辆段整个装配化施工呈现的是面施工的特点,且装配化施工过程中不会存在场地的完全提供,而是需要与土方开挖、现浇结构等工序交叉作业。此外,盖板结构架设完成后,纵梁与纵梁之间存在节点需要浇筑,盖板上方会有一层约20 cm的叠合层需要浇筑,通过节点和叠合层的浇筑,使盖板构件连成整体才具有承载能力,进而才有继续施工的条件。车辆段底板及上层结构上都存在有台阶、镂空等环境,立柱浇筑完成后,立柱上方会有一定高度的预埋筋。
基于场地情况以及结构的特点,传统的施工设备站位在同一层面施工会存在2个问题:1)设备支腿站位所处的列,梁片无法架设,导致梁片装配不能连续,影响现浇工作;2)施工设备不具备过坎、过镂空等能力。
因此,最终确定采用的边装配边浇筑的施工工法,具体步骤为:单端支腿站位在上方已浇筑梁片上,单端支腿站位在下方,整个设备跨3列梁片,结合土方开挖情况,先横向装配跨内梁片,架设的过程中,后方已架梁片的浇筑工作随之展开;待跨内梁片架设完成后,返回最初的架设位置,此时该处的节点及叠合层已浇筑完成,并达到了等强要求,设备在此处纵移至下列,上方支腿站位在上一次架设并浇筑等强后的梁片上。依次按照上述方式往前推进。直至所有梁片全部架设完成。梁片的运输采用运梁车带梁直接开上首层结构至设备下方。
2.2 该施工工法的特点及优势
1)整个施工是稳步推进的方式,各个施工工序在空间上是相互错开的,装配施工能较好地衔接土方开挖、现浇等其他工序的作业。前方的土方开挖不会影响后方的架梁,且现浇工作是在已架梁片区域施工,架梁工作不会影响后方的现浇施工。
2)该施工工法不存在传统门式起重机或其他设备支腿站位处的梁片无法架设,导致后续有大量的梁片需补位的问题。
3)该施工工法对于设备纵向走行更灵活。站位在下层的支腿纵移时需通过已浇筑的立柱,而立柱的排布不均匀。该施工工法下,设备能在整列下寻得一处适合通过的区域。
2.3 施工设备
2.3.1 整机参数的确定
结合架设梁片的效率、现浇工作面的展开以及现浇的效率,与设计院、施工单位进行沟通。整个设备横跨3列梁片,支腿踩位及运梁通道占据1列已浇筑梁片,架设2列梁片,下层支腿站位1列,根据车辆段结构,整个跨度达到69 m。主梁采用桁架结构,能减少整机质量,减小设备的迎风面积,增加整机的稳定性。根据设计院和施工方提供的数据,层高在12 m,梁高2.5 m,塔机最低位高16 m,考虑设备本身的吊具高度1.35 m及站位高度,整个设备的起升高度设计为20 m。根据设计院提供的最大梁重117 t,选定额定起重量为120 t。
2.3.2 台阶及镂空的处理
整机横向走行及纵向走行过程中,上层支腿和下层支腿都会存在碰到台阶或镂空的工况。针对这种情况,考虑采用单端设置4条支腿,共8条支腿的结构形式,支腿的基距错位设置,且每条支腿采用伸缩柱形式,设置有升降液压缸,当设备走行到台阶位置时,通过依次提升支腿并越过台阶,使支腿站位在台阶上或支撑到镂空下一层。
2.3.3 过塔机、架设第2层
采用平头塔机,整机走行过程中遇到塔机时,将其降低至最低位,并将其大臂方向垂直于设备主梁方向,同时顶升设备主梁至最高点,使设备从塔机上方通过。通过后将塔机升高,设备开始另外一侧的架设。整个过程有效地避免了塔机、设备的拆装,节省了施工时间。
针对双层车辆段,在设备架设完一层后,采用两端支腿顶升的方式将设备升高开始第2层的施工。因此,考虑将8条支腿做成通长的伸缩柱,便于设备的支腿在不同层之间的踩位。
结合前述需求,支腿的伸缩行程达到12 m。其具有2个功能特点:1)当过台阶、过镂空时,主要是支腿单独提升,此时主梁不动、支腿动作。2)当需要支腿主动顶升主梁,抬高主梁高度时,此时为支腿不动、主梁提升。此外,整机还需横向和纵向移动,通过对工况分析,舍弃卷扬钢丝绳提拉、齿轮齿条啮合等形式,采用液压缸伸缩的方式。由于伸缩行程较大,故整个主梁升降采用转换套步履爬升方式。
2.3.4 载荷的控制
梁片的承载有一定的范围,为了使载荷满足要求,利用单端的4条支腿下方轮组的均衡液压缸进行顶升调节,能够较好地分配各条支腿的载荷,从而达到要求。
同时为了使支腿尽可能地站位在多片梁片上,将支腿下方的轮组以及车架设置转向功能,当下方站位的梁片方向不同时,可以通过轮组或车架的转向实时调整站位姿态。
2.3.5 不同列宽的考虑
前支腿和中支腿采用托挂轮形式与主梁连接,通过升降液压缸提升前支腿或后支腿,利用挂轮走行使前支腿或中支腿在主梁的相对位置发生变化。当遇到列宽不同时,通过调整前、中支腿的位置,避免与立柱发生干涉。
2.3.6 梁片的架设
针对梁片的不规则排列以及规格不一的情况,将吊具设计为单点带回转结构,同时,吊具上设置有横向和纵向调平液压缸,吊具下方设置滑道,2吊点通过在滑道上进行无级调节,适应不同梁长的吊装。同时起重小车具有横移功能,能实现架设时对梁片进行微调,且能在整机不动的情况下实现多片梁片的架设,提高整机效率。
根据上述分析,确定了施工设备的整体框架,主要组成有主梁、起重小车、前辅助支腿、前支腿、中支腿、后支腿、电气系统、液压系统、动力系统、走台栏杆等,其结构如图4所示,性能参数如表1所示。
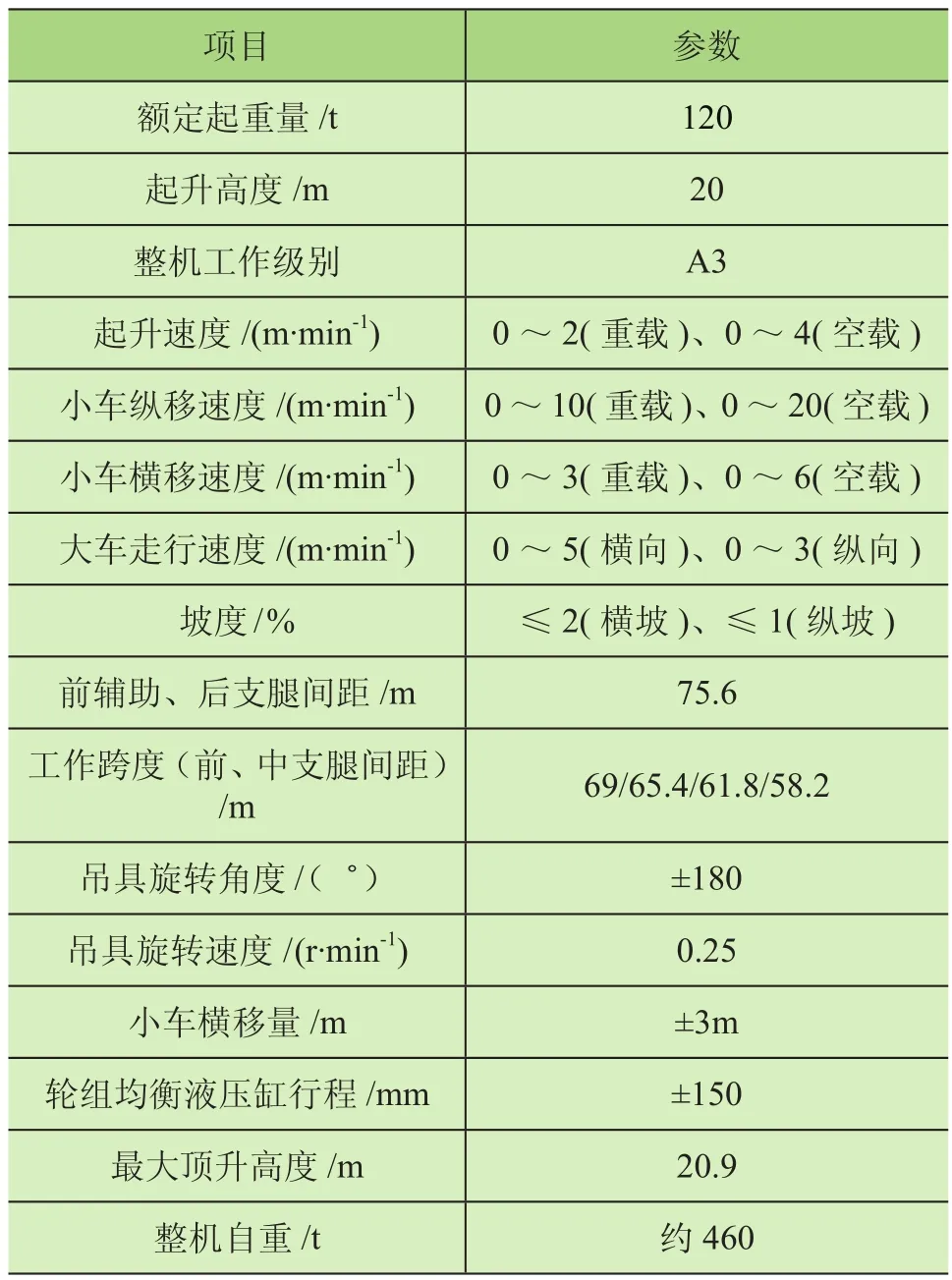
表1 主要性能参数
3 关键技术
3.1 整机走行同步性控制
整机跨度最大达到69 m,且起升高度达到20 m,8条支腿均为细长杆件,整机在横向和纵向走行过程中,为防止结构受扭,对同步性的要求非常严格。但设备在基坑内的位置以及周边环境是变化的,无法在基坑内找到固定的参照物作为基准来校验同步性。为了精准地掌握两侧支腿走行的同步性。在以往编码器加变频控制的方式上,引入了北斗定位纠偏系统。
在设备横向运行前,通过北斗导航获取设备首尾两端的坐标值,并根据这2个坐标值计算出机身的初始斜率。在横向运行过程中,实时获取两端的坐标值,得到机身的实时斜率。将实时斜率与初始斜率进行比较,根据斜率的变化通过变频控制走行电动机的速度,直到斜率基本一致。利用北斗导航能将坐标值的精度控制在10 mm以内,极大地满足了设备同步性的要求。
同时,为了保证支腿长细杆结构的整体稳定性,在设备上安装有支腿垂直度检测装置,当支腿垂直度值超过设计允许值时,能使得设备立即停止并调整支腿的姿态。
3.2 支腿载荷控制
支腿载荷的控制有2种方式:一种为被动溢流方式,通过设定8条支腿的均衡液压缸的溢流值,当某条支腿的载荷超过设定的溢流阈值时,液压缸溢流收缩,从而使此处的支撑点下沉,增加其他支腿承载。该方式存在的问题是:1)4条支腿载荷的分担不确定,每条支腿的载荷不够明确,整个结构是动态的平衡的过程。2)每次装配梁片时,8条支腿的液压缸均会慢慢往下落,直至均衡液压缸收缩到底。当均衡液压缸收缩到底时,则是液压缸结构受力,使得检测的载荷存在错误的状况。故每次都需要对均衡液压缸进行归零操作。
另一种为主动顶升的控制模式,如图5所示,通过对最外端2套支腿设定1个初始承载,并通过轮组均衡液压缸的伸缩以达到该载荷要求。在架梁过程中,当该支腿的载荷发生变化时,通过系统控制均衡液压缸进行实时调整。整个控制系统采用闭环的控制模式,使得该支腿的载荷控制精度更高,从而满足使用工况的需求。相比被动溢流,主动顶升控制模式下,支腿结构受力更为明确,整机状态也相对更清晰。
通过对比分析,设备采用主动顶升模式。同时,在每个轮组的均衡液压缸上设置有行程检测传感器。该传感器的设置能较好地判断均衡液压缸的行程,且能更好、更精准地得到支腿载荷,使误差更小。
3.3 整机的轻量化设计
由于梁片的承载能力小,而设备外形尺寸达到80 m×20 m×24 m(长×高×宽),使得设备的轻量化设计尤为关键。同时,整机稳定性也需保证,特别是对于支腿这类长细杆压弯构件来说尤为重要。
为了解决该问题,整机设计上采用了薄壁高强度钢,通过薄壁大截面维持整体稳定性,并利用加筋等方式来处理局部稳定性的问题。主梁采用高强度钢桁架结构,为有效减轻起重小车自重,将起升卷扬布置在两端。
3.4 智能信息化设计
针对设备长细杆件多、周边施工环境复杂等特点,设备的相关监测装置显得尤为关键。整机除配备有常规的电动机编码器、起升高度限位等外,还配有TIKS智能轮胎管理系统、支腿载荷智能分配系统、支腿垂直度检测、主梁水平度检测等检测传感器,如图6所示。此外配置了多个微型摄像头用于自动插销的状态监控,高像素枪机摄像头布置于每条支腿及小车上,用于施工作业区域的监视。
通过传感器及监控装置实现整机智能纠偏、小车智能纠偏、前/中支腿挂轮智能纠偏、起升自动同步、超载起升自动报警、超高起升自动停机、防施工载荷超限、防整机倾覆、支腿插销防护、小车防撞保护等功能。同时根据设备运作时的各关键部位、各重要阶段,设置了检测信号优先级,信号分为预警和报警状态2种,一旦出现异常,无需人工干预,设备立即保护,主动停机,大大提升了安全性,同时减少了施工监护人员。
为了实现车辆段施工的信息化管理,根据车辆段施工特点设置了远程集中控制平台。在现场附近设置集控中心,利用有线或无线通讯网络将现场设备和集控中心连接,实现数据、视频、语音信息的互联互通。采用和现场司机室内一致的操作台,包括操作手柄、按钮、设备状态显示器、视频显示器等,实现全过程的数据、视频的可视化,对现场设备进行远程集中监控和施工信息的统一协调管理。可实现:1)对设备的自身运行状态实时监测,排除各类风险点;2)对各类设备地理位置、工作状态进行实时监控;3)建立设备从入场到出场的全生命周期的电子档案;4)结合工程计划,根据设备的工作状态,合理调配工作任务,协同高效作业。
4 结语
装配式建筑作为国家今后发展方向,目前由于缺少相关的经验、案例,使得装配化车辆段的设计、施工、管理等等暂无相关的执行标准。本文提出了一套完整的装配化车辆段的施工设备及施工工法,成功应用于广州某地铁车辆段的装配化施工。填补了该领域的一项空白,对于后续车辆段的装配化设计标准的定制具有重要的意义,同时也为后续的装配化车辆段的施工提供了可靠的施工经验和方法。