基于Event模型的无人机垂直碰撞风险研究
2022-11-17郭悦翔司海强刘鸿仪姜一
郭悦翔,司海强,刘鸿仪,姜一
(中国民航大学 空中交通管理学院,天津 300300)
0 引 言
随着无人机行业的发展,关于无人机安全运营的问题进入人们的视野,特别是小型四旋翼无人机,因其受管制力度较小,更容易出现碰撞风险。Peter.Brooker 教授[1]在Reich模型的基础上提建立Event 模型,是目前最广泛使用的风险评估模型之一。徐肖豪等[2]基于Event 模型中的垂直碰撞风险计算模块,研究了垂直安全间隔对碰撞风险的影响。杨硕[3]考虑位置和速度的因素,建立基于四维坐标的碰撞风险评估模型。甄然等[4]改进了Event 模型的碰撞盒,使用两个圆柱体结合模拟无人机外形。
本文针对小型四旋翼无人机运行过程中的碰撞风险进行研究:阐述了传统的Event 模型,分析了无人机碰撞风险的产生原因,扩展了适用于四旋翼无人机的改造Event 模型,并对未来的研究方向进行了前瞻。
1 传统Event 模型
将侵入飞行器视作A,目标飞行器为B。飞行器A 作为中心,假设A 的长、宽、高分别为L、W、H,以飞行器A的机身长度、宽度、高度的二倍,作为碰撞模板的长宽高,将长方体区域称为临近层。将飞行器B 看作质点,并从该点创建出一个三维坐标系,用X 轴表示飞机纵向,Y 轴表示飞机侧向,Z 轴表示飞机垂直方向,将平面XBY 作为垂直间隔层,如图1所示。
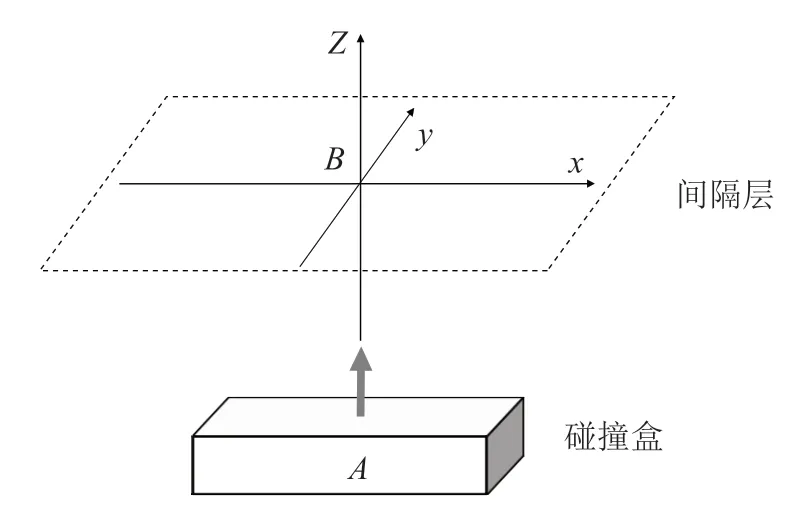
图1 垂直风险评估模型
如果碰撞盒进入间隔层区域,并穿越间隔层,将会生成一个扩展碰撞盒,如图2所示。将四边形EGIC 定义为拓展碰撞盒,即飞行器A 与飞行器B 的运动区域。将碰撞盒的起点区域定义为A,最终区域定义为A’,DEFHIJ 区域代表飞行器A 的飞行经过区域。如果质点B 进入DEFHIJ 范围内,即可判定两飞行器发生碰撞。因此两机在垂直方向的碰撞风险概率就等于A 飞行器碰撞盒垂直穿越间隔层的概率与B 飞行器出现在长方形CDEF 中的概率的乘积[3],即:
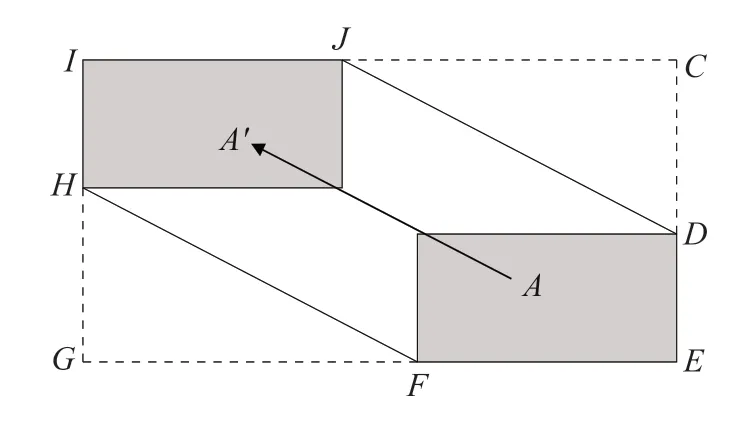
图2 拓展碰撞盒

其中:NZ定义为两机垂直方向上的碰撞风险概率;uX、uY、uZ定义为两飞行器分别在纵向、侧向、垂直方向三个方向上的相对速度;SX定义为纵向安全间隔标准;PZ(SZ)为垂直重叠概率;E(0)为纵向临近率,即相邻航路上飞机纵向间隔小于标准间隔的飞机数量与航路上飞机总数的比值;PY(0)表示同一高度层上两机侧向重叠的概率。
2 改进的无人机碰撞风险模型
2.1 基于几何特征改进的Event 模型
没有改进的Event 碰撞模型的模板为长方体,之后的一些学者对其进行改进,以减小冗余计算。D.A.Hsu[5]提出飞机的实际模型更倾向于圆柱体。戴福青等[6]认为机身和翼展在实际情况下飞机的机身和翼展长度不等,并且由于飞机俯仰角度的限制,航空器绕横轴偏转形成的空间范围接近于椭球体。
由于四旋翼无人机和固定翼飞行器在几何形态上存在着巨大差异,因此针对小型四旋翼无人机,长方体、椭球体、圆柱体等都有运动区域面积不够准确的缺陷,不能表现无人机的真实形态。因此把四旋翼无人机的碰撞模板设置为带圆角的长方体,更符无人机的几何特征,改进后的模板计算出的无人机碰撞风险概率比较准确,碰撞模板如图3所示。
此模板以无人机A 为中心,2L、2W、2H为碰撞模型的长、宽、高,2r作为圆角半径。其中L、W、H分别为无人机的长度、宽度、机高,r为无人机旋翼叶片的长度。假设目标机B 为静止状态,以B 为原点建立三维坐标系,对无人机在飞行过程中的纵向、侧向、垂直方向的碰撞风险分别进行分析,即分别对碰撞模板在三个面的投影进行分析,碰撞模板三视图如图4所示。

图4 碰撞模板三视图
与经典Event 模型作对比,改进后的Event 模型在纵向和侧向的投影变化较小,垂直方向上投影变化较大,同时结合四旋翼无人机可以快速改变高度的特点,因此将研究的目标放在垂直方向的碰撞风险研究上。
针对改进的Event 模型,研究四旋翼无人机垂直方向的碰撞风险。假设目标机B 为质点,侵入无人机A 在穿越垂直方向间隔层的过程中,A 机的碰撞模板掠过航迹会在垂直间隔层平面上留下投影。矩形EGIC 即为纵向拓展碰撞盒,abcdefgh 区域即为飞无人机A 飞行掠过航迹的投影,如图5所示。

图5 垂直方向拓展碰撞盒
令abcdefgh 区域的面积为S′,EGIC 区域的面积为S,则两机在垂直方向发生飞行碰撞的概率即为阴影部分所占整个长方形面积的比值RZ(0)[3]。由图可知:
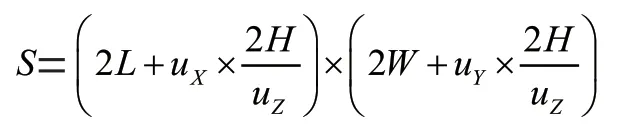
abcdefgh 区域面积为长方形EGIC 面积减去两顶角空白区域面积,再减去两个三角形面积,即:

由于aD和bF不易算出,采用理想情况的值,即ab与CE呈45°时,eH和fG同理,即:

由此可以推出abcdefgh 区域的面积为:

因此:

NZ′与两机于垂直方向产生碰撞的概率RZ(0)的乘积为四旋翼无人机垂直方向Event 模型求出的碰撞风险概率值,即:

2.2 基于运行风险改进的碰撞风险评估模型
无人机系统操作是人—机—环境相互交互的一个过程,同时受到政策的制约。其中操作员本身、无人机系统、外界环境条件、管理因素对任务执行产生影响的影响较大。因此,本文考虑运行环境条件、无人机驾驶员、无人机系统以及管理因素建立无人机风险指标体系。
驾驶员在操控无人机的过程,就是一个根据预定计划,接受无人机状态、环境因素等信息后进行分析,最后执行对应操作的过程。在操作过程中,人的认知行为主要分为4 项:观察、解释、计划、执行[7]。同时,这4 种行为具有各自不一样的失效模式。假设4 个指标互相影响,将4 种行为的失效概率看作是一个并联系统,可以得出无人机操作员的可靠度,即:

其中:P1定义为驾驶员观察行为的可靠度,P2定义为驾驶员解释行为的可靠度,P3定义为驾驶员解释计划的可靠度,P4定义为驾驶员执行行为的可靠度。
在无人机飞行过程中,飞控及电调的失效将导致无人机无法进行操作,无人机侵入其他无人机发生碰撞的概率增加。假设电机失灵在只考虑机械因素,不考虑操作员的操作失误下,保持一台及以上电机工作均可以操作无人机远离侵入无人机。四个电机互为独立系统为并联系统,飞控与电机为串联系统。故以上系统组成了一个混联系统,无人机系统可靠度为:

其中:R1为无人机三余度飞控计算机的可靠性,R2为无人机电机的可靠性。
环境因素对无人机的飞行活动也具有严重影响,甚至大于环境因素对大型运输机的影响,在复杂的气象条件下碰撞风险会随之提高。但是由于外界条件诸如气象条件、空域条件等复杂多变,难以将环境影响因素具体量化。因此,当无人机间存在碰撞风险时,将此时空域内的环境因素影响定义为N1,N1的值取决于环境的优劣。当N1=1 时代表环境为理想状态,不会对无人机运行安全造成影响;在N1>1 时,则代表环境恶劣会增加无人机的碰撞风险。
同理,管理因素对无人机运行的影响定义为N2。当N2=1 时代表管理良好,可以遏制碰撞危险的发生,N2>1代表相关管理办法没有发生作用,反而增加了无人机的碰撞风险[8]。
考虑操纵员、无人机系统、环境、管理因素4 个维度的关系,应该是相互独立的,最终建立无人机风险指标体系,即:

NZ″与无人机风险指标体系系数I的乘积为考虑了运行风险的无人机垂直方向碰撞风险的概率值,即:

3 仿真实验
以低空多小型四旋翼无人机大疆Spark 为例,机长26.5 cm,机宽26 cm,机高5 cm。在实验室环境下,通过动作捕捉系统计算两无人机的相对速度,对垂直方向的碰撞风险进行仿真实验。实验参数如表1所示。

表1 垂直碰撞风险参数表
同时,假设环境状况良好,没有出现恶劣天气,气象条件为理想情况,管理因素没有起到有效作用。风险指标体系如所示。
把表1和表2中的参数代入公式中,得到改进前后无人机垂直碰撞风险值,如表3所示。

表2 无人机风险指标
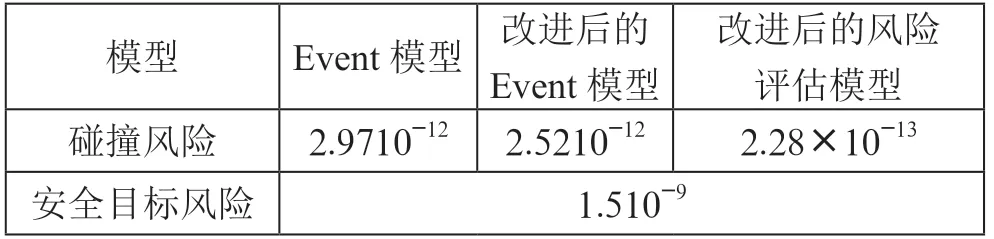
表3 改进前后垂直碰撞风险评估结果
根据实验结果可知,通过对传统Event 模型进行改进,获得的针对四旋翼无人机的垂直碰撞风险为2.52×10-12次事故/小时,与传统Event 模型的计算结果2.97×10-12次事故/小时相比,降低了15.2%的风险值。同时,二者安全目标水平规定的碰撞风险均小于民航局规定的最低标准1.5×10-9次事故/小时。说明改进的针对四旋翼无人机的垂直方向Event 模型是可行的,而且更加精确。
而结合风险指标改进的风险评估模型,在改进后的Event 模型基础上,将碰撞风险值降低了一个数量等级,使碰撞风险大大降低,增加了无人机飞行过程中的安全性。
4 结 论
本文研究了传统Event 碰撞模型,并以此为基础改进出适用于小型四旋翼无人机的碰撞风险模型。首先,建立带圆角的长方体的碰撞模板,使其更符合四旋翼无人机的几何特点;其次,根据改进后的模型,推导出针对无人机垂直方向碰撞风险的公式;最后,使用小型四旋翼无人机大疆Spark进行仿真实验。实验结果表明,使用改进后Event 模型计算得到的碰撞风险为传统Event 模型的84.8%,改进后的风险评估模型使碰撞风险值降低了一个数量级,证明改进后的Event 碰撞模型提高了预测碰撞风险计算的准确性,成功降低了冗余计算和碰撞风险,具有实际意义。
通过对小型四旋翼无人机风险评估模型的研究,预计未来可以从以下3 个方向深入研究:(1)将研究非管制空域内的最小安全间隔。目前大量的关于碰撞风险评估模型的研究都是在管制空域下的,但是很多小型无人机在非管制空域内运行,降低非管制空域内的碰撞风险是必要的。(2)深入通信、导航、监视因素影响的研究。小型无人机受管制力度小,更多是基于CNS 性能导航,因此要加强基于CNS 性能的碰撞模型的计算精度。(3)细分空中交通中人为因素的影响。人是无人机运行过程中不可或缺的组成部分,包括驾驶员、空管人员、维修人员等等,每一环都会对无人机的安全飞行造成影响,细分每一环的风险因素有助于定点排除航空器的碰撞风险。
