多旋翼植保无人机静电喷雾系统设计与性能试验研究
2022-11-17周贵东丁宝鑫李宇飞白一铭刘海堂陈为琦
周贵东,丁宝鑫,李宇飞,白一铭,刘海堂,陈为琦
(黑龙江八一农垦大学 工程学院,黑龙江 大庆 163319)
1 静电喷雾技术应用研究现状及研究目的
1.1 国内外研究现状
静电喷雾技术在国外的研究和应用早于国内,自20世纪70年代开始,美国等西方农业发达国家,通过大量试验对静电喷雾技术原理展开探索[1-3]。如美国学者Law研制了基于感应式静电喷雾系统的静电喷雾机和离心式静电喷雾机等地面喷雾设备,取得了较好的作业效果[4-5]。美国 ESS 公司在已有研究成果基础上,进行了静电喷雾配套机械的研制,并将辅助气流与静电进行结合,实现了静电喷雾设备的商品化[6-7]。在之后的多年里,相关学者基于航空施药机械,开展配套静电喷雾系统的研制,取得了较高的科技成果和经济效益。国内对静电喷雾技术的研究开展相对较晚,静电喷雾的主要应用对象是小型植保机械,如小型背负式静电喷雾器、静电喷雾车和风送式静电喷雾机,除此之外,国内相关学者也利用静电喷雾技术围绕多种作物开展喷雾性能和病虫害防治效果的研究[8]。如江苏大学对静电喷雾理论及其测试技术进行了一系列的研究,试制法拉第桶式荷质比测量装置[9]。中国农业大学研究团队研制了针对于果园的自动对靶静电喷雾机。山西农业大学研究团队设计了可消除反向电离的气力式静电喷头[10-11]。
经过对比发现,我国农业静电喷雾技术尚处于技术研发阶段,该技术在推广和转化上稍显不足,除此之外我国的航空植保机械常应用于应对突发性灾害和特殊作物的病虫草害防治,主要作为地面植保机械的补充性工具,为提升其地位,必须提高其喷雾质量。由于田间作业环境复杂、植保无人机喷雾作业对病虫害药效的防治效果并非完全明朗,部分专家对大面积推广和应用该项技术还存在疑虑。只有更好地解决现有静电喷雾系统充电效率较低、通用性和配套性较差的问题,才能保证整个静电喷雾系统的工作稳定性。
1.2 研究目的
为减少雾滴飘移,提高航空植保过程中药液有效利用率,本研究将静电喷雾技术与植保无人机技术相结合,利用电场力增强雾滴在作物表面的附着力和沉积均匀性,并运用植保无人机变量喷雾技术,达到减量高效施药的目的。通过试验的方法,对比静电喷雾系统和常规喷雾的实际作业效果,从沉积特性方面,分析静电喷雾的技术优势,为进一步优化静电喷雾技术提供指导和数据支撑。
2 农用植保无人机静电喷雾系统
将感应式静电充电技术运用于静电喷雾系统的设计中,该系统组成包括供电电源、感应环悬架、感应环、离心喷头、静电发生器等。系统结构如图1所示。其中关键部件为适用于植保无人机的感应式离心静电喷头,该部件安装于旋翼正下方。以防止旋翼下压风场干扰雾化效果。采用12 V直流电源配合可调静电发生器为静电喷头充电,电源等部件布置于无人机横轴下部。无人机作业平台为四旋翼植保无人机,喷头轴向距离为180 cm,无人机药箱容积为10 L,电池容量为16 000 mA·h,无人机作业续航时间为15 min左右。
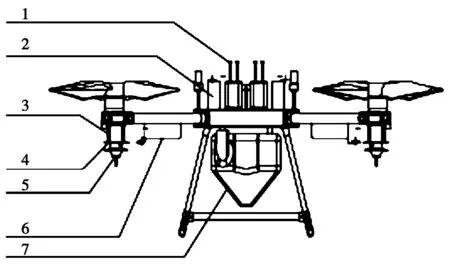
1.RTK差分天线模块;2.供电电源;3.感应环悬架;4.感应环;5.离心喷头;6.静电发生器;7.药箱
2.1 静电喷头
静电喷雾系统中的关键部件为感应式静电喷头,其结构如图2所示,喷头组成包括电极安装架、感应环、出水口、旋叶、离心喷头固定柱等。感应电极材料为紫铜,该材料具有高导电性,另外材料具有一定耐腐蚀性,能够保证较长使用寿命和较高荷电效率,感应环与喷头呈轴向嵌套布置,内部保持较小间隙,电极安装架为尼龙绝缘材料。
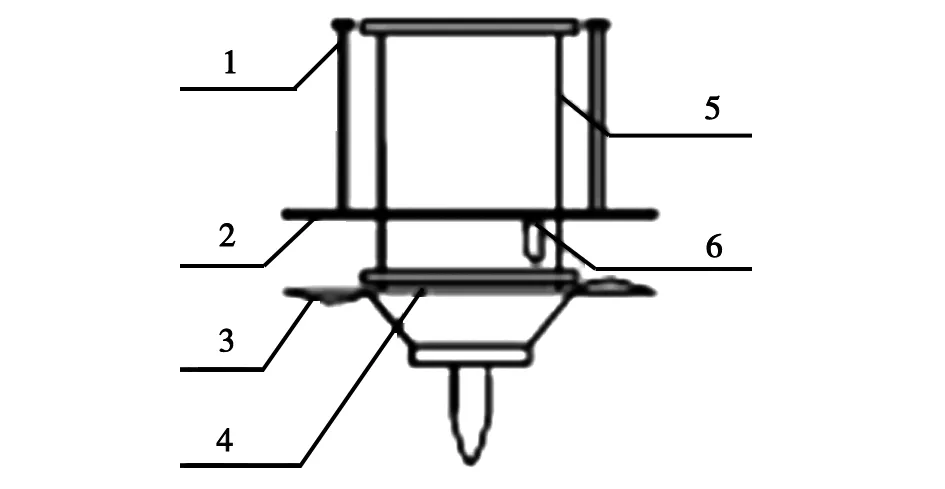
1.电极安装架;2.感应环;3.出水口;4.旋叶;5.离心喷头固定柱;6.进水口
2.2 静电发生器接线方式
静电发生器的接线决定了静电喷雾系统的稳定运行能力。采用感应式荷电方式,利用可调式静电发生器正极与感应环相连,负极需要接地。系统接线简图如图3所示。当系统搭载平台为无人机时,静电发生器的负极连接农用植保无人机机架金属支架,此时负极端相当于接地处理。

图3 接线方式
2.3 静电喷雾流量控制
为保证荷电效果,必须将充电过程与喷雾量进行匹配,要求喷雾流量保持稳定,为此设计植保无人机流量控制系统,该流量控制系统包含喷洒控制装置、喷洒装置、流量检测装置。在工作过程中,无人机飞控系统将飞行数据传输给喷洒控制模块,通过PWM脉宽调制器调整水泵喷洒参数,最终控制喷洒流量值。
3 试验设计和方法
3.1 试验设计
试验为田间试验,在试验进行过程中,利用手持式风速仪及温湿度测量仪,对试验区域的气象条件进行测量和记录。所使用的试验器材为风速仪、米尺、水敏纸、多旋翼植保无人机、扫描仪、计算机、自封袋、曲别针、自来水。田间试验所需材料及其具体用途如下表1。
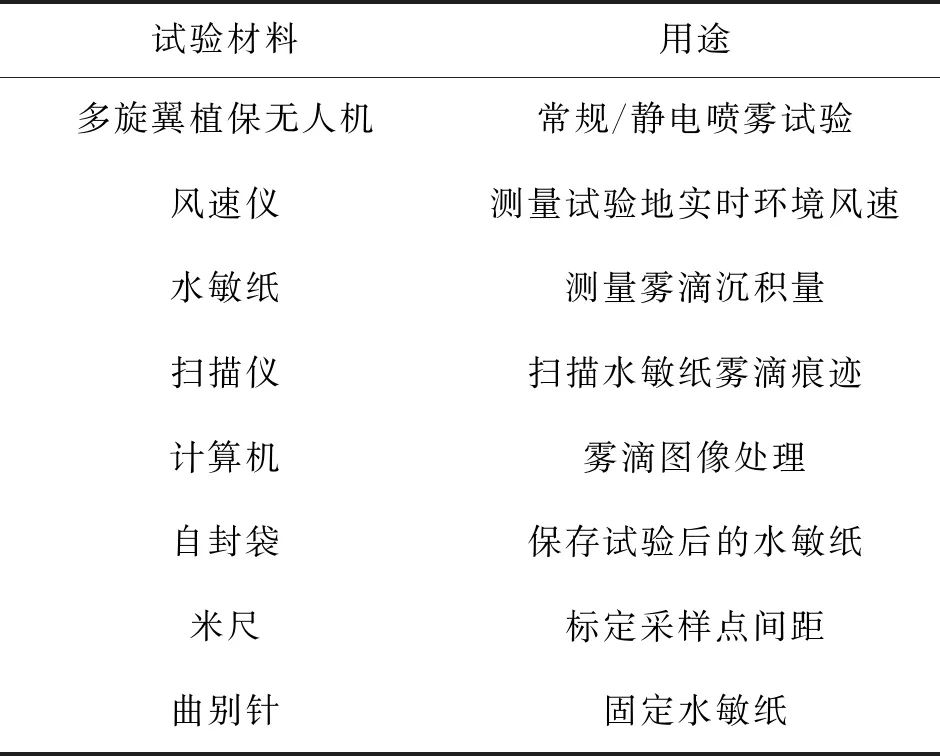
表1 试验材料与用途
选取四旋翼植保无人机进行静电喷雾和普通喷雾对比试验,药箱容量10 L,喷雾压力0.15~0.4 MPa,额定喷幅5.5 m,用水量30 L·hm-2。雾滴检测专用水敏纸的用途在于可以在田间观测雾滴沉积效果,采集雾滴后的水敏试纸风干处理,再用激光扫描仪对水敏试纸上的雾滴痕迹进行扫描,最后运用图像处理软件进行雾滴尺寸及密度分析。
3.2 试验方案
为探明植保无人机施药过程中,雾滴在靶标作物上方的运动和分散状态,试验内容包括穿透性检测和飘移性能检测。选取玉米和大豆两种作物作为靶标作物,分别划定两块长30 m,宽15 m的试验田块,沿飞行航线划定喷雾区与飘移采样区,在喷雾区每隔2 m选取2株作物,在叶片正面、反面及距顶部15 cm的冠层正面布置水敏纸。试验喷雾工作参数如下表2,作物冠层布点方式如图4所示,水敏纸田间布点如图5所示。
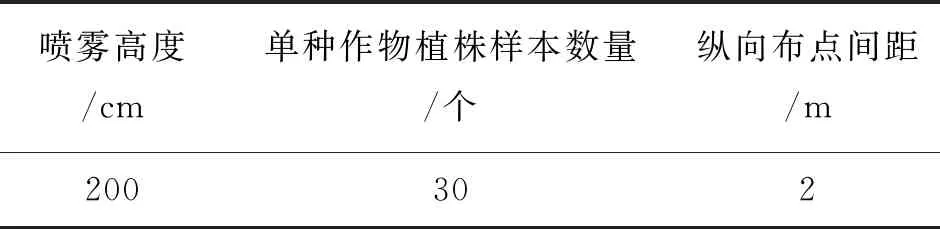
表2 试验参数
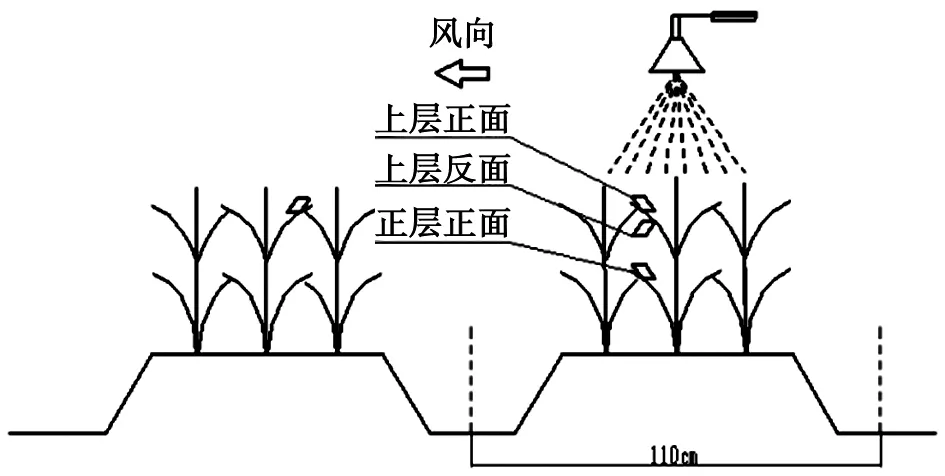
图4 水敏纸冠层布点示意图
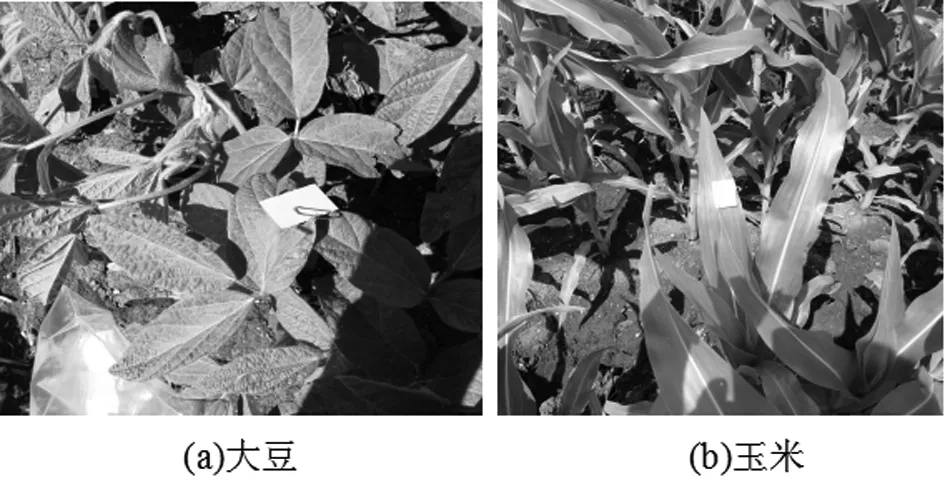
图5 水敏纸田间布点
将雾滴采集水敏纸干燥后,按照采样点位置将水敏纸进行分类和编号,经过扫描和图像处理,软件自动计算采样位置的雾滴沉积量。最后将试验数据进行整理和计算,取得变异系数CV值,该指标可以准确反应出雾滴沉积的均匀程度
(1)
(2)
式中S—同一次采集样本标准差;
Xi—各采样点雾滴沉积量,uL·cm-2;

n—各次采样点数。
4 结果与分析
4.1 雾滴沉积均匀性对比分析
为简化记录并便于区分各组试验数据,用字母A、B分别代替大豆和玉米。若喷雾方式为静电喷雾则用+号表示。通过对数据的汇总与计算,得到雾滴采集信息汇总表(表3)。

表3 雾滴采集信息汇总表 单位:%
在相同作业条件下,对比静电喷雾与非静电喷雾的雾滴沉积效果发现,静电喷雾的沉积量变异系数更小,减小幅度在25%左右,证明了使用静电喷雾技术能够有效提高喷雾沉积均匀性。
4.2 雾滴飘移分析
考虑到作物植株类型对雾滴飘移程度几乎无影响,因此在大豆试验田块范围内选取飘移试验区域,设置目标组与对照组,分别对沉积量进行采集,综合室外试验现场风向,选取下风向为飘移区,分别收集目标区域与飘移区域雾滴,并按照区域收集水敏试纸,扫描后进行图像处理。经过计算,得出飘移区域的雾滴沉积量,并对雾滴体积中径进行统计,得出雾滴飘移信息采集表(表4)。

表4 雾滴飘移信息采集汇总表
综合雾滴飘移沉积数据,在一定的喷雾高度范围内,航空喷雾系统所产生的药液雾滴具有更低的飘移率及更小的体积中径,飘移减少量在28%左右。由此可以推断,静电喷雾技术能够在保证有效沉积量的前提下,提升喷雾的雾化效果,使药液雾滴在作物靶标表面沉积状态更加均匀。
5 结论与展望
5.1 结论
本研究主要开展了植保无人机配套静电喷雾系统设计及其沉积性能试验研究,通过对比静电喷雾与普通喷雾在雾滴粒径、均匀性、飘移性等沉积性能指标,分析得出静电喷雾技术工作特点,试验数据表明,该系统能够提高植保无人机雾滴沉积均匀度25%左右,降低雾滴飘移量28%左右,证实航空静电喷雾技术可减少农药的使用量,降低种植成本,有利于农田环境保护。
5.2 展望
目前,静电喷雾系统已应用于植保机械中,但在试验中发现该技术还存在一定的不足,主要表现为药液雾滴穿透能力不足,这与雾滴的尺寸存在一定关联,若将静电喷雾技术与植保无人机结合,借助无人机旋翼下风场的作用,有利于提高雾滴穿透性能。因此下一步还应对静电喷雾系统作用位置进行优化,配合旋翼风场扰动作用,提高静电雾滴在作物冠层下部的沉积量,以充分发挥静电喷雾技术的能力。
