驾驶经验对L3级自动驾驶接管绩效的影响*
2022-11-17王琳岩张慧珺胡宏宇
王琳岩,张慧珺,胡宏宇
(吉林大学,汽车仿真与控制国家重点实验室,长春 130022)
前言
自动驾驶汽车可以为人们的出行方式提供更安全、更节能、更舒适的方案,是国内外公认的工业体系核心战略发展方向之一。2021年4月更新发布的SAE J3016[1]标准中针对汽车自动化级别进行了划分和描述,明确了不同等级自动驾驶系统的功能以及驾驶员和系统的责任范围。在所有级别中,L3级有条件自动驾驶系统由于能够在大多数常规道路上实现自主行驶且无需驾驶员监管,因此具有更大的市场应用前景,已成为国内外许多车企重点布局的目标量产产品。
L3级有条件自动驾驶可以在其设定的操作设计域(operational design domain,ODD)内执行全部动态驾驶任务(dynamic driving task,DDT)。但自动驾驶系统一旦发生系统失效或者故障,将无法可靠地执行动态驾驶任务,进而导致事故的发生,因此需要人工干预。此时,系统会向驾驶员发出接管请求(take-over request,TOR),驾驶员需要及时响应并接管车辆。在L3级自动驾驶期间,驾驶员不需要对车辆进行监控,可以从事各种非驾驶任务(nondriving related tasks,NRDT)[2],其手、脚、眼、脑等感官往往处于离环状态(out of the loop,OOTL)。这种情况下,驾驶员对驾驶环境的感知理解将减弱,尤其是在长时间的非驾驶任务后,接管车辆重新回到在环状态(in the loop,ITL)进行操纵将极具挑战性[3]。Zeeb等[4]和Kerschbaum等[5]认为接管过程包括以下几个心理和生理阶段:(1)将注意力从非驾驶任务转移到驾驶环境上;(2)评估当前驾驶场景做出决策;(3)将手、脚移动到转向盘、踏板上准备进行操纵;(4)最终通过转向盘、踏板执行操纵。当L3级自动驾驶车辆发出TOR时,尽管它不能再安全地执行操作,但可以通过HMI来辅助驾驶员做出决策。
关于驾驶员年龄和驾驶经验方面,Clark等[6-7]发现,相比于年轻驾驶人,年龄较大的驾驶人偏离道路中心线的程度更低,驾驶速度相应较低。徐筱秦等[8]表示,年龄对接管反应时间没有影响,而在接管操作方面有差异,有经验的中年驾驶员比没有经验的年轻驾驶员能够识别出更多的危险,时间预算更短。
本研究旨在探讨不同驾驶经验对驾驶员接管绩效的影响。根据驾驶员驾龄和年均驾驶里程将参与者分为驾驶经验不足和驾驶经验丰富两组,在驾驶模拟器平台上进行实验,设计了不同非驾驶任务、视觉辅助和紧急避障接管场景来模拟L3级自动驾驶中的接管过程,采集表征参与者反应时间和接管绩效的一系列测量指标进行统计分析,预期为驾驶经验与接管绩效的相关性研究提供理论依据。
1 方法
1.1 实验参与者
实验招募了24名参与者(男性16名,女性8名),年龄范围在22至51岁之间,平均年龄29.95岁。实验参与者均持有我国有效驾照,平均驾龄为8.04年,平均年均驾驶里程为7 283.33 km,年均驾驶里程标准差为8 893.36 km,并且所有参与者没有过L3级自动驾驶相关经验。参与者中年轻驾驶员为在校大学生,驾龄和年均驾驶里程较短;中年驾驶员驾驶经验相对较为丰富。
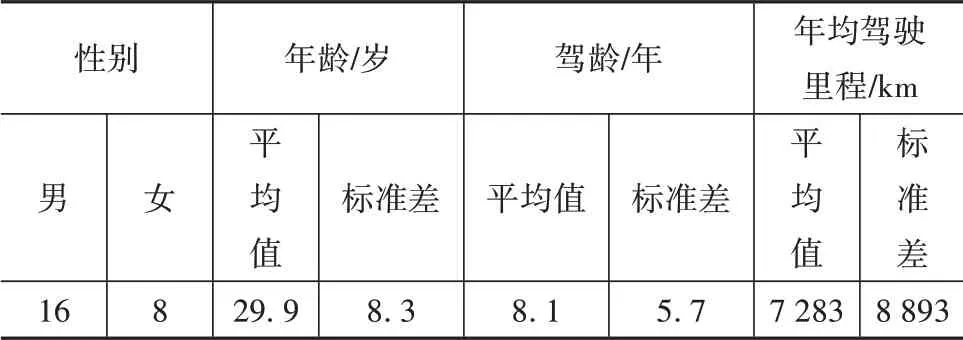
表1 参与者信息
1.2 实验设备
实验在模拟L3级自动驾驶功能的驾驶模拟器平台上进行,具体包括以下设备:工作站主机、驾驶场景显示屏、一个额外的7英寸小屏幕用于显示视觉辅助、一个用作非驾驶任务的平板电脑、听觉提醒音响、罗技G29 Driving Force模拟赛车转向盘、制动和加速踏板等。如图1所示,在实验过程中自动驾驶期间,参与者的手、脚、眼和注意力可以脱离驾驶任务。
1.3 实验设计
实验场景为通过Prescan-Simulink软件联合仿真环境下搭建的总体区域长1 000 m、宽500 m的城市道路场景,包括双向四车道和双向六车道。在接管请求发出前,L3自动驾驶汽车以50 km/h的速度在城市道路上行驶。紧急避障接管场景中分为两种情况:前方道路施工区域和道路上出现坠落物(见图3)。接管请求发出后,参与者需要进行制动或换道以避开障碍。参与者可以直接通过转动转向盘或踩下制动踏板来停用自动驾驶功能,重新控制车辆。
当L3级自动驾驶系统超过其ODD时,系统无法继续安全执行驾驶任务,但此时仍然可以通过HMI显示信息采集、信息分析和决策选择阶段的可用信息。实验中的接管请求使用1 s左右的“WARNING”人声警报音作为TOR,同时伴有如图3所示的3种视觉辅助。
(1)无辅助:“WARNING”图像代表无规划信息。
(2)文字辅助:“向左/向右”和“制动”图像代表文字型视觉辅助。
(3)图标辅助:绿色箭头和红色三角图像代表图标型视觉辅助。
实验中的次任务选择了看视频(认知和视觉任务)和玩游戏(认知、视觉和动作任务)。各组实验中,接管场景出现的位置和时间略有不同,并且接管请求的类型和非驾驶任务出现的顺序都是随机的,以此降低学习效应。
1.4 实验流程
实验开始前,参与者被要求填写一份包括年龄、性别和有关驾驶经历的问卷。然后,向参与者介绍研究目的、实验要求、模拟器功能和参与者在实验中的任务角色。之后,参与者坐在驾驶模拟器中,将座椅调整到舒适的位置,以确保他们能够看到驾驶场景屏幕、视觉辅助屏幕和非驾驶任务设备。
接下来,参与者在驾驶模拟器中进行5-10 min的练习,以熟悉驾驶场景、自动驾驶系统和接管操作。练习实验场景与正式实验场景相似。同时,向参与者解释每一种视觉辅助的含义。参与者被要求在自动驾驶开启时进行非驾驶任务,将手离开转向盘,脚离开踏板,此时不必时刻关注道路。
在准备和练习之后,在正式实验中,每名参与者在L3级自动驾驶模拟器上通过不同的非驾驶任务和视觉辅助组合,进行了6组实验。每组实验中自动驾驶持续约3 min,然后当碰撞时间(time to collision,TTC)低于6 s时,系统会发出TOR,其中包括1 s左右的“WARNING”人生警报和一种类型的视觉辅助。然后参与者需要根据所看到的视觉辅助给出的决策建议或自身经验规避障碍。
每组实验结束后,参与者休息3-5 min;同时,实验人员保存实验数据,修改实验场景。
1.5 实验指标及其预处理
本实验采用了如下客观测量指标来获取参与者的反应时间和接管绩效。
(1)操纵反应时间:操纵反应时间指从TOR发出开始到第一个可检测到的转向或制动输入之间的时间,单位为s。
(2)车速标准差:TOR发出后手动驾驶期间的车速标准差,单位为m/s。
(3)最大转向盘转角:TOR发出后手动驾驶期间转向盘转过的最大角度,单位为rad。
(4)转向盘转角标准差:TOR发出后手动驾驶期间转向盘转角的标准差,单位为rad。
(5)车道位置标准差:TOR发出后手动驾驶期间车辆中心线与车道中心线之间偏移距离的标准差,单位为m。
(6)最大合加速度:TOR发出后手动驾驶期间的最大合加速度,单位为m/s2。
式中:ax为纵向加速度;ay为横向加速度,单位为m/s2。
由于数据记录不当,或者有些参与者在接管请求发出前已经触碰了转向盘,从144组(24名参与者×6组试验)实验数据中排除了9组数据。
2 实验结果
2.1 操纵反应时间
图4为不同驾驶经验的参与者在操纵反应时间上的对比情况。不同驾驶经验的参与者在无辅助条件下(配对t检验,p=0.136>0.05)、文字辅助条件下(配对t检验,p=0.184>0.05)和图标辅助条件下(配对t检验,p=0.421>0.05)的反应时间均不存在显著差异。驾驶经验丰富的参与者之间,不同视觉辅助下的反应时间不存在显著差异(F(2,63)=0.197,p=0.769>0.05);驾驶经验不足的参与者之间,不同视觉辅助条件下的反应时间不存在显著差异(F(2,63)=0.903,p=0.447>0.05)。
2.2 车速标准差
图5显示了不同驾驶经验参与者的车速标准差对比情况。不同驾驶经验的参与者,在无辅助条件下的车速标准差存在显著差异(配对t检验,p=0.036<0.05),在文字辅助条件下(配对t检验,p=0.078>0.05)和图标辅助(配对t检验,p=0.112>0.05)条件下不存在显著差异。驾驶经验丰富的参与者之间,不同视觉辅助下的最大转向盘转角不存在显著差异(F(2,63)=0.645,p=0.583>0.05);驾驶经验不足的参与者之间,不同视觉辅助条件下的反应时间不存在显著差异(F(2,63)=0.792,p=0.465>0.05)。
2.3 最大转向盘转角
图6显示了不同驾驶经验参与者的最大转向盘转角对比情况。不同驾驶经验组别的参与者在无辅助(配对t检验,p=0.024<0.05)、文字辅助(配对t检验,p=0.027<0.05)和图标辅助(配对t检验,p=0.047<0.05)条件下的最大转向盘转角均存在显著差异。驾驶经验丰富的参与者之间,不同视觉辅助下的最大转向盘转角不存在显著差异(F(2,63)=2.832,p=0.067>0.05);驾驶经验不足的参与者之间,不同视觉辅助条件下的最大转向盘转角存在显著差异(F(2,63)=3.212,p=0.031<0.05)。
2.4 转向盘转角标准差
图7为不同驾驶经验参与者的转向盘转角标准差的对比结果。不同驾驶经验组别的参与者在无视觉辅助的条件下,转向盘转角标准差存在显著差异(配对t检验,p=0.005<0.01),在文字辅助条件下的转向盘转角标准差不存在显著差异(配对t检验,p=0.112>0.05),在图标辅助的条件下转向盘转角标准差不存在显著差异(配对t检验,p=0.083>0.05)。驾驶经验丰富的参与者之间,不同视觉辅助下的转向盘转角标准差不存在显著差异(F(2,63)=0.462,p=0.598>0.05);驾驶经验不足的参与者之间,不同视觉辅助条件下的转向盘转角标准差存在显著差异(F(2,63)=3.236,p=0.043<0.05)。
2.5 车道位置标准差
图8显示了不同驾驶经验参与者的车道位置标准差对比情况。不同驾驶经验组别的参与者在无辅助(配对样本t检验,p=0.186>0.05)、文字辅助(配对样本t检验,p=0.423>0.05)和图标辅助(配对样本t检验,p=0.407>0.05)条件下的车道位置标准差均不存在显著差异。不同视觉辅助条件下,驾驶经验丰富的参与者之间(F(2,63)=1.976,p=0.364>0.05)和驾驶经验不足的参与者之间(F(2,63)=1.632,p=0.233>0.05)的车道位置标准差均不存在显著差异。
2.6 最大合加速度
图9显示了不同驾驶经验参与者的最大合加速度差异。不同驾驶经验组别的参与者之间在无辅助条件下的最大合加速度存在显著差异(配对样本t检验,p=0.017<0.05),在文字辅助(配对样本t检验,p=0.173>0.05)和在图标辅助(配对样本t检验,p=0.071>0.05)条件下的最大合加速度均不存在显著差异。不同视觉辅助条件下,驾驶经验丰富的参与者之间(F(2,63)=0.776,p=0.301>0.05)和驾驶经验不足的参与者之间(F(2,63)=0.972,p=0.147>0.05)的最大合加速度均不存在显著差异。
3 讨论
通过对实验中参与者的反应时间数据分析可以发现,不同驾驶经验对于接管过程中的操纵反应时间没有显著影响。这一点与先前Clark[6-7]和徐筱秦[8]等的研究结果一致。然而,一些将接管时间与驾驶员年龄相关的研究结果与驾驶经验的影响有些许差异。例如,Gold等[9]的研究发现,46岁以下的驾驶员接管时间比平均值更短;而Lee等[10]在针对年轻人(20-35岁)和老年人(60-81岁)的两组实验中却发现老年人的各项反应时间低于年轻人。由此发现,在这些研究中对年龄分组和驾驶经验分组的定义缺乏共识,尤其是包含驾驶经验丰富的年轻驾驶群体,可能会混淆后续的统计分析。
在无辅助的情况下,驾驶经验不足的参与者在接管过程中的车速标准差相对于驾驶经验丰富的参与者更大。这反映了依靠自身经验完成接管时,经验不足的参与者对车速的把控能力较弱。而在具有视觉辅助下不同驾驶经验的参与者避障过程中的车速标准差不存在显著差异,是因为参与者在收到接管请求后回归驾驶场景时,对车速的感知不足造成的。
不同驾驶经验的参与者在最大转向盘转角上有着显著的差异;同时,在辅助条件不同的情况下,驾驶经验不足的参与者在最大转向盘转角和转向盘转角标准差上都存在显著差异,而驾驶经验丰富的参与者之间并没有显著性差异。这表现出驾驶经验对于接管绩效中的车辆横向控制有明显的影响,经验丰富的参与者接管过程中的变道操作更平稳,而经验不足的参与者在有无视觉辅助的情况下横向控制差异明显。车道位置标准差同样显示出经验丰富组略小于经验不足组,但没有显著的统计学差异。
最后,在无辅助的条件下驾驶经验不足的参与者和驾驶经验丰富的参与者之间的最大合加速度存在显著差异。数值小的最大合加速度表示参与者对TOR的反应更稳定,这也说明依靠自身经验接管车辆时,经验丰富的参与者在TOR之后能更平稳安全地控制车辆。
4 结论
本实验研究了L3级自动驾驶接管过程中驾驶经验对接管绩效的影响,并对实验中采集的反应时间、表征驾驶员接管绩效的车辆参数进行了分析。结果表明,具有不同驾驶经验的参与者在反应时间上并没有显著差异。然而,丰富的驾驶经验在最大转向盘转角、转向盘转角标准差等指标上表现出了显著的提升。同时,在无视觉辅助的情况下,经验不足组与经验丰富组之间的差异更加明显。因此,在L3级自动驾驶接管过程中,经验丰富的驾驶员能够更平稳、安全地恢复对车辆的控制。本实验为今后研究驾驶经验与接管绩效的相关性提供了参考。