大型低速风洞多通道电液伺服阵风发生器协同驱动控制策略研究
2022-11-16于金革王建锋李明阳董韶鹏马占元
于金革, 王建锋, 吴 帅, 李明阳, 董韶鹏,4, 马占元, 明 强
(1.中国航空工业空气动力研究院, 黑龙江 哈尔滨 150001; 2.低速高雷诺数气动力航空科技重点实验室, 黑龙江 哈尔滨 150001;3.北京航空航天大学, 北京 100191; 4.北京航辰机载智能系统科技有限公司,北京 100123)
引言
对于大展弦比飞机,由于机翼结构柔性强,对阵风响应更加敏感,阵风载荷经常成为飞行载荷最严重的情况[1-2]。阵风使机翼根部承受很大的动态结构载荷增量,容易使机体产生疲劳破坏。阵风干扰还影响飞行员操纵飞机,导致飞行品质降低。在空中飞行的导弹,若是遭遇阵风,将引起导弹的刚体运动及弹性振动,可能影响导弹的结构安全、电气设备的可靠性及命中精度[3]。此外,阵风干扰还引起乘员感到不适,降低乘坐品质[4]。因此在飞机设计阶段必须准确预测阵风载荷,且主要是通过风洞模型试验的方式进行。
为了更好地开展阵风试验相关研究,需要建设阵风发生器,并研究阵风流场特性。20世纪60年代开始,出现了各种形式的阵风发生器。欧美发达国家在高校中建立了多个低速风洞发生器,其中,意大利米兰理工学院在4 m×3.84 m低速风洞中设计了电机驱动的6叶片阵风发生器;美国杜克大学阵风发生器采用旋转开槽气缸驱动翼型的方式产生阵风[5-6];美国伊利诺伊理工学院在其风洞闭口试验段建立了摆动叶片式发生器,利用伺服电动机驱动摆动叶片产生正弦曲线运动[7]。国外在高速风洞阵风发生器方面也开展了广泛的研究,其中美国TDT风洞采用4个振荡机翼[8-9]以简谐运动方式生成阵风;英国皇家学会TWT风洞建立了尾缘吹气式阵风发生器[10]。
相比而言,国内阵风发生器研制以风洞试验单位为主,且只有低速风洞具备阵风试验能力。其中,北京航空航天大学在航天十一院3 m×3 m风洞研制了摆动叶片式阵风发生器和半模型支撑装置[11-13]。
中国空气动力研究与发展中心的梁鉴等[14]在4 m×3 m风洞研制了可产横向和纵向阵风的两套发生器。金华等[15]在8 m×6 m风洞设计、加工了一套阵风发生器,并研制了全模支撑系统,该发生器可在40 m/s风速下产生正弦阵风,模型中心处最大阵风幅值大达9 m/s[1],已开展多期试验。
上述国、内外阵风发生器多采用电机+直线连杆形式,叶片只能按同波形、同频率、同摆角运动,无法实现叶片组合波形运动,不能分别设置每个叶片的运动参数,限制了发生器的使用范围。此外,随着我国大型客机研制对阵风场模拟指标的提升,需提高发生器叶片的弦长、展长、摆角和摆频等参数,这就意味着驱动系统需提供更大角加速度和扭矩。
由于电液伺服系统具有结构紧凑、功重比高、驱动力大、响应速度快等优点,所以针对FL-10风洞阵风发生器需求,研制了4通道伺服液压摆动缸直驱形式的阵风发生器。4个叶片横贯风洞,每个叶片在风洞外的一端连接一个摆动式液压马达,进行独立驱动。此驱动形式的发生器洞内机械结构少,流场品质好;由于独立控制,所以摆动可设置多频率、多摆角、多波形的组合运动,为阵风相关研究提供了非常好的模拟条件。为了保证阵风模拟的品质,需要4通道实现不同模式的协同控制,同时为了模拟高频的阵风干扰,要求运动频率很高,这对控制提出了很高的要求。
针对高精度电液位置伺服控制,学者们提出了多种伺服控制算法,包括针对干扰抑制的线性自抗扰控制器[16]、鲁棒自适应高精度位置控制[17]、自适应鲁棒的电液伺服转台双马达同步控制等[18]。为此,针对FL-10风洞阵风发生器的协同控制,提出了一种改进的抗干扰共反馈同步误差校正控制方案。试验表明研究的同步控制算法达到了预期的效果。
1 电液阵风发生器原理
1.1 总体方案设计
4通道的阵风发生器结构如图1所示。发生器安装在FL-10风洞的闭口试验段中,试验段尺寸为8 m(宽)×6 m(高)×21 m(长),空风洞最大风速为110 m/s。阵风发生器叶片为4组,翼型为NACA0015,展长6 m,弦长0.5 m,叶片间距为0.7 m。

图1 风洞阵风发生器整体布置图Fig.1 Overall scheme of wind tunnel gust generator
1.2 电液驱动与控制系统设计
为满足阵风发生器叶片运动时气动力矩和惯性力矩大、摆动频率高的要求,采用叶片式液压伺服摆动马达进行驱动。电液伺服摆动马达驱动与控制叶片系统如图2所示,主要包括大流量伺服阀、伺服摆动马达和运动控制器等组成。
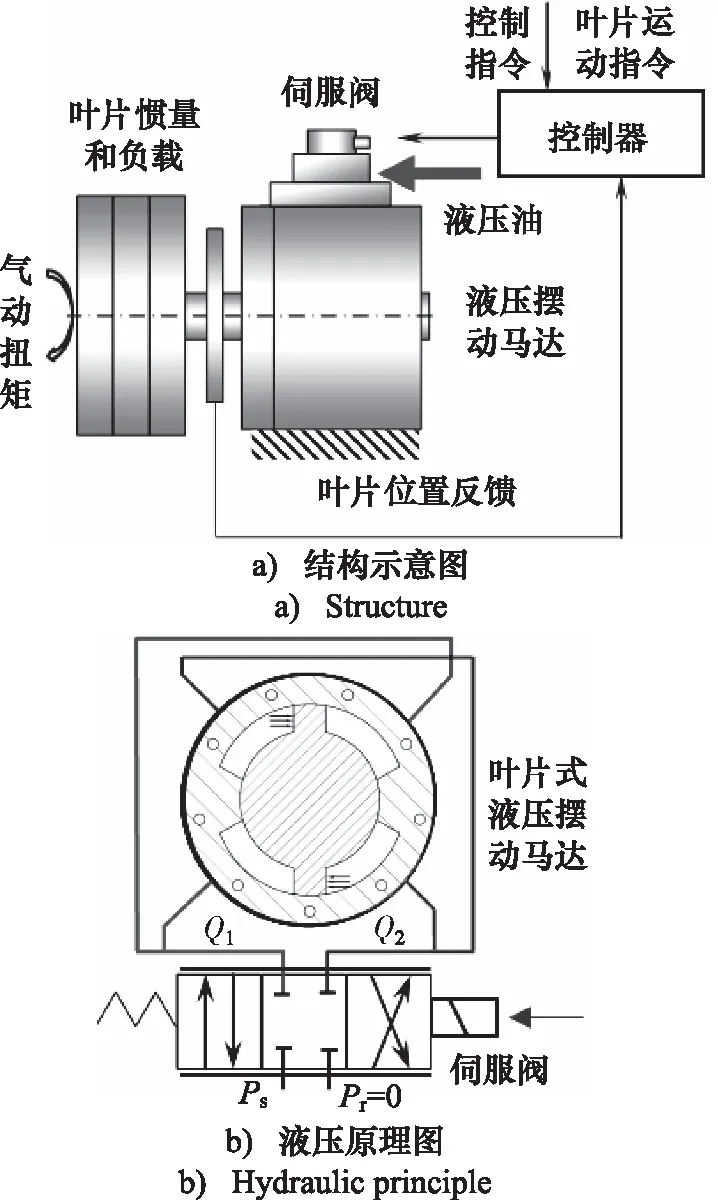
图2 阵风发生器驱动原理图Fig.2 Principle of electro-hydraulic gust generator
发生器叶片需要实现15°,10 Hz和5°,15 Hz两种典型的高频正弦运动。根据计算,可得15 Hz,5°正弦运动的最大速度为471.24 (°)/s(8.22 rad/s),最大角加速度为44413.22 (°)/s2(775.09 rad/s2);10 Hz,15°正弦运动的最大速度为942.48 (°)/s(16.45 rad/s),最大角加速度为59217 (°)/s2(1033.53 rad/s2)。
叶片和传动轴的总转动惯量为0.81 kg·m2,乘以转动惯量可得最大惯性负载为835 N·m。通过流场数值模拟分析,得到叶片在风洞受到的最大气动扭矩约为788 N·m,所以液压马达总的驱动力矩要大于1623.9 N·m。考虑到外部机构的摩擦等其他损失,按照85%的带负载效率考虑,液压马达额定输出扭矩不应小于2000 N·m,再考虑20%的预留量,设计摆动缸的动态输出扭矩为2400 N·m,据此计算摆动缸的排量为:
Dm=Tm/pm
(1)
式中,Dm—— 液压摆动缸的单位弧度排量
Tm—— 动态扭矩需求
pm—— 动态工作压力
取动态工作压力为14 MPa,然后取整排量Dm为170 mL/rad。为了提高驱动端的紧凑性,采用了一体化集成驱动设计,大幅缩短了驱动结构的长度,有利于高频运动驱动的实现。图3为阵风发生器叶片式液压马达。

图3 阵风发生器叶片式液压马达Fig.3 Vane type hydraulic motor of gust generator
获得排量之后,根据摆动缸的最大速度要求,就可以计算出伺服阀的流量需求为168 L/min。为满足装置高频、高精度的控制要求,采用Moog的D791高频响电液伺服阀作为控制元件,其额定流量为250 L/min,-3 dB幅值衰减和-90°相移的频响大于200 Hz。
2 协同控制策略研究
2.1 电液马达叶片驱动系统数学建模
本系统的控制需求是实现4个叶片按照设定的运动波形运动,从而对流过的气流产生一定波形和频率的扰动,实现实际飞行环境下的阵风模拟。其控制需求,主要是高频运动波形的控制精度和多通道间的相位同步要求。
本研究中的阵风发生器的叶片驱动系统是一个典型的阀控马达位置闭环伺服系统,其数学模型主要包括伺服阀的流量方程、液压马达的流量连续性方程和负载的力平衡方程,3个方程对应的拉氏变换分别如式(2)~式(4):
QL=Kqxv-KcpL
(2)
(3)
pLDm=Jts2θm+Bmsθm+Tl
(4)
式中,QL—— 伺服阀的负载流量
Kq—— 伺服阀的流量增益
xv—— 伺服阀的阀芯位移
Kc—— 伺服阀的流量压力系数
pL—— 液压马达的两腔负载压降
Dm—— 液压马达的排量
Kl—— 液压马达的泄漏系数
Vt—— 液压马达的负载容积
βe—— 液压油有效弹性模量
Jt—— 液压马达转子和叶片的总转动惯量
Bm—— 负载黏性阻尼系数
Tl—— 气动负载力矩
θm—— 叶片运动角度
2.2 单通道位置伺服控制策略研究
由于风洞内来流速度很高,叶片面积很大,所以叶片的负载力矩很大,对运动控制是一个很大的挑战,且系统要实现大幅值、高动态、高精度的角度控制,所以实现其控制是本研究的难点。
针对这一个问题,本研究提出一种干扰补偿的前馈控制方法,单通道的系统控制框图如图4所示。为了实现高频的位置控制,控制环节中加入了速度和加速度前馈。针对支撑结构在风洞内部会受到风载的干扰的问题,闭环反馈采用了PID控制和基于干扰观测的位置控制(Disturbance Observer based Motion Control Systems,DOC),将运动过程中的气动负载变化和未知负载都视为干扰,通过补偿环节进行补偿,保证系统的控制稳定性。

图4 单通道控制框图Fig.4 Diagram of one servo control channel
干扰观测器的基本思想是将外部干扰及模型参数变化造成的实际对象与名义模型的输出差异,全部等效至控制输入端,即观测出等效干扰,在控制中引入等量的补偿,实现对干扰完全抑制,其基本思想如图5所示。
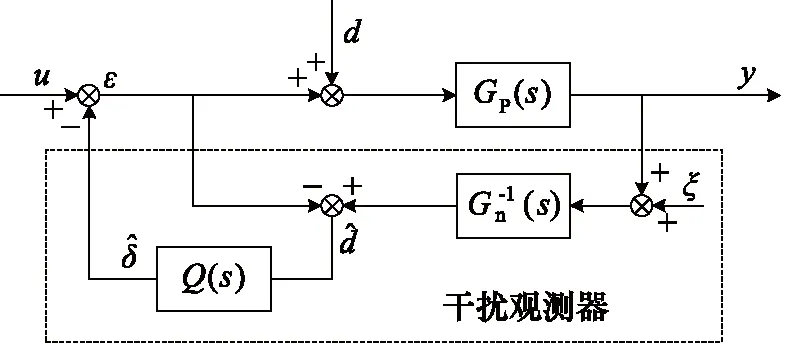
图5 干扰观测器原理图Fig.5 Principle of distrbance observer

y=GUY(s)u+GDY(s)d+GξY(s)ξ
(5)
其中,
(6)
(7)
(8)

则在低频时,由式(6)~式(8),有:
GUY(s)=Gn(s),GDY(s)=0,GξY(s)=-1
(9)
上式说明,在低频段,即使GP(s)≠Gn(s),或存在不确定性,干扰观测器仍使得实际对象的响应与名义模型的响应一致,即控制器对对象参数变化具有一定鲁棒性。GDY(s)=0说明干扰观测器对于Q(s) 频带内的低频干扰具有完全的抑制能力。GξY(s)=-1说明干扰观测器对于低频测量噪声非常敏感,因此,在实际应用中,必须考虑采取适当的措施,减小运动状态测量中的低频噪声。
在高频段,Q(s)=0,由式(6)~式(8),有:
GUY(s)=GP(s),GDY(s)=GP(s),GξY(s)=0
(10)
上式说明,干扰观测器对高频测量噪声也不敏感。综合而言,干扰观测器能够实现不同频率段的干扰补偿。
2.3 多通道控制策略研究
本系统中,4个通道是独立同等控制,但每个通道的负载以及干扰都会存在一定的差异,因此在采用同等同步控制的基础上加强各支路的联系,减小各支路的运动差异,对4个液压马达的位移进行互为补偿,采用的控制策略如图6所示。

图6 同步控制策略Fig.6 Principle of synchronous control
采用一种交叉耦合同步控制结构,选择一个通道作为主运动通道,认为该通道的协同误差为0,其他通道的输出角度和主运动通道进行补偿,将两通道液压马达的角度进行求差,并将二者的差值反馈到前向通道,分别对液压缸的运行加以有效控制以达到减小同步偏差的目的。
3 系统测试
FL-10风洞的阵风发生器系统实物如图7所示,包括4通道的电液伺服阀马达、控制系统及叶片结构,液压马达安装在叶片的一端。

图7 FL-10风洞4通道电液伺服叶片驱动系统Fig.7 Four-channel electro-hydraulic servo blade drive system of FL-10 wind tunnel
3.1 叶片转动惯量测量
叶片转动惯量是影响发生器性能的重要指标,也是液压马达参数选择考虑的主要因素。采用测试设备进行了叶片转动惯量的测量(见图8),测量值与设计值的最大差量为0.06 kg·m2。

图8 叶片转动惯量测量Fig.8 Blade moment inertia measurement
3.2 叶片同步控制测试
在叶片摆角15°、摆频10 Hz的工况下,开展正弦同步控制测试,4组叶片同步驱动的结果如图9所示,指令之间的误差曲线如图10所示。从结果可以看出,叶片很好的跟踪了需要的运动轨迹,每个通道的角度误差都在0.7°以内,任意2个叶片运动波形的相位差都小于1°,满足阵风发生器的使用要求。

图9 4组叶片同步运动曲线Fig.9 Synchronous motion curves of four groups of blades
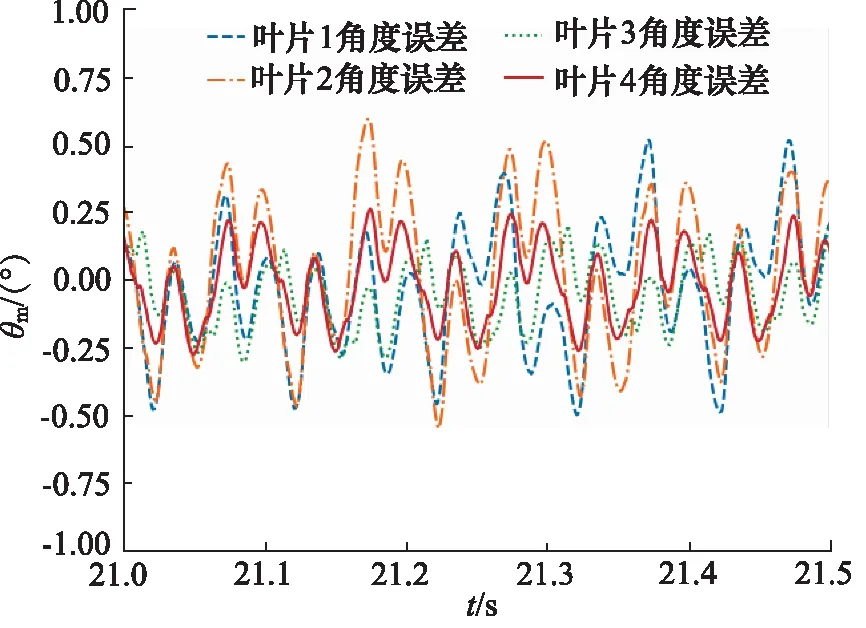
图10 4组叶片同步运动误差曲线Fig.10 Synchronous motionerror curves of four groups of blades
3.3 叶片不同运动波形测试
发生器叶片采用液压伺服摆动缸直驱的方式,可实现正弦波、三角波及随机波等多种波形的组合运动,图11给出了4组叶片同时、非同步摆动的组合运动波形图,表明发生器能模拟大气中不同形式的扰流,尤其是随机波的生成使设备具备了连续阵风的模拟能力。

图11 4组叶片同时摆动(不同运动)波形图Fig.11 Waveforms of four groups of blades with different motions (simultaneous oscillations)
4 阵风流场校测与试验验证
对叶片阵风发生器的阵风发生效果进行了校测试验,阵风流场校测采用丹麦的Streamline Pro多通道热线风速仪。图12给出叶片摆动频率为8 Hz、摆角为8°时下不同风速的阵风流场曲线,由图可见,阵风幅值随来流速度不断提高而增大,在来流风速70 m/s,y方向的最大阵风速度幅值为12.6 m/s。在来流风速固定40 m/s,叶片摆角幅值为4°时,y方向的阵风速度幅值随摆动频率增大而不断提高,最大工作频率达到16 Hz。这些指标表明研究的阵风发生器能够很好的满足阵风模拟需求。

图12 阵风流场曲线Fig.12 Gust flow field curve
基于阵风发生器,进行了阵风减缓试验。采用某全弹性民机模型,在来流风速20 m/s下,将叶片由下至上按1~4顺序编号,其中叶片1和4摆角为3.5°,摆动频率为1 Hz;叶片2和3摆角为2.5°,摆频为3.5 Hz。在该工况下开启和关闭阵风载荷减缓控制系统,获得机体响应如图13所示。由图可见,发生器叶片可组合频率运动,实现了多频率复杂阵风场的模拟,很好的支撑阵风载荷减缓试验研究。

图13 阵风载荷减缓试验结果Fig.13 Gust load alleviation effect
5 结论
通过FL-10风洞电液阵风发生器测试与试验验证,可以得出以下结论:
(1) FL-10风洞电液阵风发生器设计合理,采用液压伺服摆动直驱的设计方式,可实现高频率、大幅值阵风流场的模拟;
(2) 4通道电液同步伺服控制及改进的共反馈同步误差校正控制方法的采用保证了多通道的同步控制精度;
(3) 发生器具备多频率和多波形的复杂阵风场模拟能力,并通过了某全弹性民机模型阵风载荷减缓试验验证,FL-10风洞建立了电液伺服阵风发生器试验平台,具备了开展阵风相关研究能力。
