固体颗粒肥变量撒施控制技术研究现状与展望
2022-11-16张季琴张东峰姜碧琼仁重义
张季琴,刘 刚,张东峰,姜碧琼,仁重义
(1.宁夏大学机械工程学院,宁夏银川 750021;2.中国农业大学现代精细农业系统集成研究教育部重点实验室,北京 100083)
化肥对提高作物产量,保障粮食安全具有重要作用[1]。中国是世界上最主要的化肥生产和施用大国[2]。据国家统计局数据,1979—2020年,我国化肥施用总量从1 086.3万 t增加到5 250.7万 t,化肥施用强度也从73.16 kg/hm2增加到 325.68 kg/hm2,远远超出发达国家防止化肥对水体造成污染的化肥施用上限值225 kg/hm2[3]。粮食作物平均过量施肥程度平均达到36.94%[2],但肥料的利用率仅为30%~40%,单位质量化肥投入带来的粮食增产不断减少[4-6]。肥料施用量的增加和利用效率的下降,不仅造成严重的经济损失,还带来严重的环境污染,如耕地土壤结构破坏、土壤板结和盐碱化[7]、水环境恶化[8]以及二氧化碳排放增加[9]等。2021年农业农村部、国家发展和改革委员会、科学技术部等印发《“十四五”全国农业绿色发展规划》,提出“以化肥减量增效为重点,集成推广科学施肥技术,培育扶持一批专业化服务组织,开展肥料统配统施社会化服务,鼓励农企合作推进测土配方施肥”的工作部署。因此,在保证粮食安全的同时实施按需投入的变量施肥方案,逐步建立科学的施肥管理技术体系,这是实现农业绿色发展的关键。变量施肥装备作为化肥“减量增效”的重要载体,其控制技术的研究和分析对于引导智能变量施肥装备开发,促进农业现代化、绿色发展具有重要意义。因此,本试验系统分析固体颗粒肥变量撒施控制技术,重点阐述国内外在变量撒施、条施控制和作业监测方面的研究进展,并对目前存在的技术问题提出建议,为改变我国变量撒施装备研究技术现状、促进变量施肥技术发展提供参考。
1 变量施肥技术概况
变量施肥技术能够根据土壤和作物营养状况,按需精准投入肥料,有效降低肥料使用量,提高作物产量,在提高肥料利用率的同时减少土壤养分空间差异,减少环境污染,是现代精细农业的重要组成部分[10]。胡中泽等认为,变量施肥技术能够有效提高玉米、小麦、水稻对氮肥、磷肥、钾肥的利用率[11-13];陈静等认为,平衡土壤养分含量、改善土壤结构,具有良好的推广价值[14]。国外变量施肥技术发展较早,已形成完整的变量施肥技术体系,具有成熟的变量智能化作业装备,已实现商品化、规模化的推广和应用[15-16]。截至2015年年底,美国变量施肥技术的应用范围达到63.6%[17],在澳大利亚、加拿大以及一些欧盟国家也有一定的应用,并取得较好的社会、经济和环境效益[18]。我国在20世纪90年代以后开始精细农业的研究,变量施肥装备的研究主要以消化吸收再创新为主,经过科研人员多年的努力,已取得一定的成果,但我国农作物种植模式多种多样,各地区地形、地貌差异较大,现有变量施肥技术装备没有得到大规模的推广应用。变量施肥的实现方式主要有基于实时传感器和基于处方图2种,其核心是对施肥量进行变量控制。工况信息如作业车速、排肥驱动轴转速、排肥量信息等的实时检测是实现施肥量准确控制的基础。根据施入方式不同,固体颗粒肥的变量施用方式主要有撒施和条施2种。颗粒肥变量撒施控制技术主要包括撒施量控制与作业监测。撒施量控制主要包括离心变量撒施技术和条播变量施肥技术。作业监测主要包括工况信息监测技术和排肥流量检测技术(图1)。
2 撒施量控制技术
固体颗粒肥变量施肥装备是变量撒施技术实施的载体,其关键是对撒施量的精准控制。排肥器作为肥料撒施的直接执行机构,其结构形式决定了控制方式。撒施装备主要有离心撒肥机、条播施肥机两大类,其变量撒施控制技术如下。
2.1 离心变量撒肥技术
离心撒肥机一般利用圆盘转动产生的离心力将肥料抛洒出去,具有撒施幅宽大、作业效率高等特点,但肥料撒施横向稳定性较低,一般应用于大规模田块基肥、追肥作业[19]。撒肥机下料口的开度决定了排肥量,撒肥圆盘的转速和结构参数影响肥料撒施幅宽与分布均匀性。因此,变量撒肥机的控制技术主要包括下料口尺寸控制技术以及撒肥圆盘结构参数优化技术。
2.1.1 下料口尺寸控制技术 变量撒肥机一般通过液压马达或电机对下料口尺寸进行自动调节,从而实现对撒肥量的精准控制[20-21]。根据排肥口位置不同,撒肥量控制方式主要有2种,第1种是肥箱侧面排肥,即在肥箱侧面开排肥口,通过控制排肥门的开度,实现排肥量的调节;第2种是肥箱底部排肥,即在肥箱底部开排肥口,通过调节排肥装置动盘相对于定盘的转角,实现排肥量的调节(表1)。
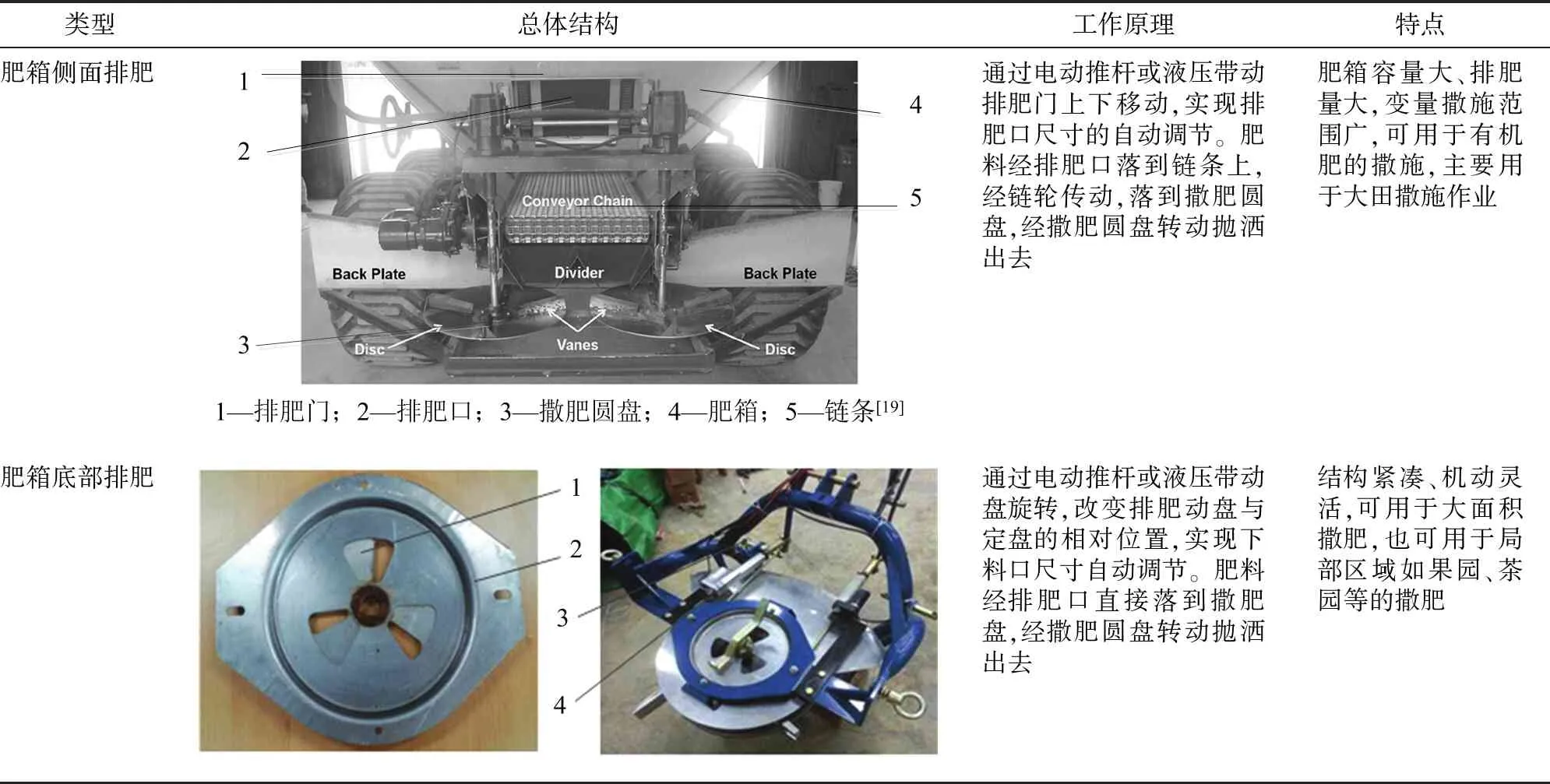
表1 撒肥机下料口结构形式
肥箱侧面排肥方式通过液压马达或电机驱动排肥门上下移动,实现撒肥量变量调节。国外如Fulton等研发出一种利用液压比例阀控制排肥门开度的双边盘变量撒施机,建立了撒肥量分布模型,并对不同施肥量下开环控制、闭环控制以及手动控制的作业性能进行对比分析,结果表明,闭环控制方式具有更好的控制精度和变量施肥一致性[22-24]。Kweon等分析肥箱侧面排肥、肥箱底部2种下料方式的肥料分布特性,针对大排量情况下肥料撒施均匀性低的问题提出优化控制方法,并提高了肥料撒施的均匀性[25]。国内如张睿等研发的链条输送式抛撒机,采用电动推杆驱动排肥门移动,位移传感器实时获取开度位置信息作为反馈,对排肥门开度进行闭环控制,实现排肥量变量调节,填补了中国变量撒肥机械的空白[20]。现有变量撒肥机大多采用肥箱底部排肥方式,通过液压马达或电机驱动肥箱底部排肥动盘转动,进而实现撒肥量的调节。国外如Han 等研发出一种单元盘撒肥机,在排肥动盘两侧连接电动推杆,可以实现排肥动盘双向调节,并分析下料口调节方向对肥料撒施均匀性的影响,构建撒肥量控制模型,提出一种优化控制方法,根据目标撒肥量选择下料口调节方向,改善撒肥均匀性[22];国内如施印炎等研发出一种采用步进电机驱动齿轮齿条结构调节排肥动盘转角,实现施肥量自动调节的双圆盘变量撒肥机[21,24],并对齿轮齿条、电动推杆、丝杠滑块3种下料口尺寸调节装置进行运动分析[25-27],结果表明,对同一目标旋转角,电子推杆下料口调节装置的响应时间最短。
2.1.2 撒肥圆盘结构参数优化技术 撒肥圆盘是离心式变量撒肥机的核心部件,主要由撒肥盘、叶片、匀肥罩等组成。肥料从下料口落下之后进入匀肥罩,经匀肥出口,通过撒肥圆盘的离心力撒施出去,主要有单圆盘和双圆盘2种结构。变量撒肥机结构参数如圆盘直径、叶片形状、叶片转角等均会影响撒施肥料的分布特性[26],为了进一步提高撒肥机横向撒施的均匀性,国内外学者基于离散单元法(DEM)、多因素响应面分析法等对撒肥圆盘结构参数进行优化。van Liedekerke等分析德国AMAZOME的ZA-M悬挂式双圆盘撒肥机施肥过程中的颗粒运动轨迹,采用离散单元法研究撒肥圆盘直径、叶片形状、叶片长度、安装角等对撒肥分布的影响[27-28]。Przywara分析撒肥圆盘的结构参数,如撒肥盘转速、叶片角度和撒肥盘转速对撒施效果的影响,发现平均撒施角受到撒肥盘肥料喂入角、撒肥盘叶片角和肥料种类的影响,平均撒施直径受撒肥盘转速影响[29]。Shi等通过基于EDEM软件的仿真撒肥试验,分析叶片倾角、撒肥高度及撒肥圆盘转速对撒肥均匀性的影响,并获得了最佳控制参数组合[30]。Yang等对3种不同类型肥料的撒肥过程进行仿真试验[31-32];通过设计响应面分析和单因素试验,分析撒肥高度、叶片位置角、下料位置角对双圆盘撒施肥料撒施均匀性的影响,并对参数组合进行优化,从而改善肥料撒施的均匀性。此外,国内学者还对甩盘[33]、锥盘[34]等不同结构撒肥圆盘的参数优化进行探索。
总体而言,针对撒施量的控制技术基本成熟,近年研究主要集中在撒肥盘结构参数优化方面。
2.2 条播变量施肥技术
条播施肥机主要通过排肥轴带动排肥器转动排肥,通过开沟器将肥料施入一定深度,能更好为种子提供养分,但其作业幅宽小,作业效率低,一般用于作物基肥和种肥的施用。常见条播施肥机的排肥器有外槽轮式、行星轮式、螺旋式、振动式、钉齿式等[35]。其中,外槽轮排肥器以其结构简单、成本低廉、各行排肥量一致性好等优点在条播变量施肥机中应用广泛。目前,变量施肥机外槽轮排肥器的排肥量调节主要有排肥轴转速控制、排肥口开度控制、排肥轴转速和开度双变量控制3种方式(表2)。
2.2.1 排肥轴转速控制技术 通过自动调节外槽轮排肥轴转速实现施肥量调节是目前最常用的一种变量施肥作业方式,但其低速作业时排肥脉动明显,排肥均匀性较差。对排肥轴转速的精确控制是实现该类型变量施肥机精准变量施肥的关键,一般通过在排肥轴的一侧安装霍尔效应传感器或编码器进行测速,将转速信息反馈给控制系统实现闭环控制。主要控制技术为比例-积分-微分(proportion-integration-differentiation,PID)控制。通过结合智能算法对PID控制参数进行整定,实现排肥轴转速的精确控制,如基于神经网络的PID参数优化算法[38]、径向基神经网络PID算法[39]、模糊PID算法[40]、基于遗传优化的RBF-PID算法[41-44]等。
2.2.2 排肥口开度控制技术 外槽轮排肥器中槽轮伸出阻塞套的长度为外槽轮的有效工作长度或排肥口开度。以排肥口开度控制调节施肥量的变量施肥系统,将原有机械或手动开度调节方式转变为液压马达或电机驱动方式,进而实现开度的自动调节。受原机械结构和安装空间限制,该控制方式实现的难点是机械结构的改装。Alameen等搭建的变量施肥试验平台,采用气缸驱动排肥口开度调节杠杆,进而实现开度变量调节[31];Su等改造了法国库恩公司的Maxim2气吸式点播机,采用伺服电机,通过链轮传动和丝杠结构实现外槽轮有效工作长度的自动调节[45];戚武振等研发的稻麦变量施肥机,采用一种丝杠排肥轴连接机构,以步进电机为动力,通过驱动排肥轴轴向移动,带动排肥器开度自动调节[46]。
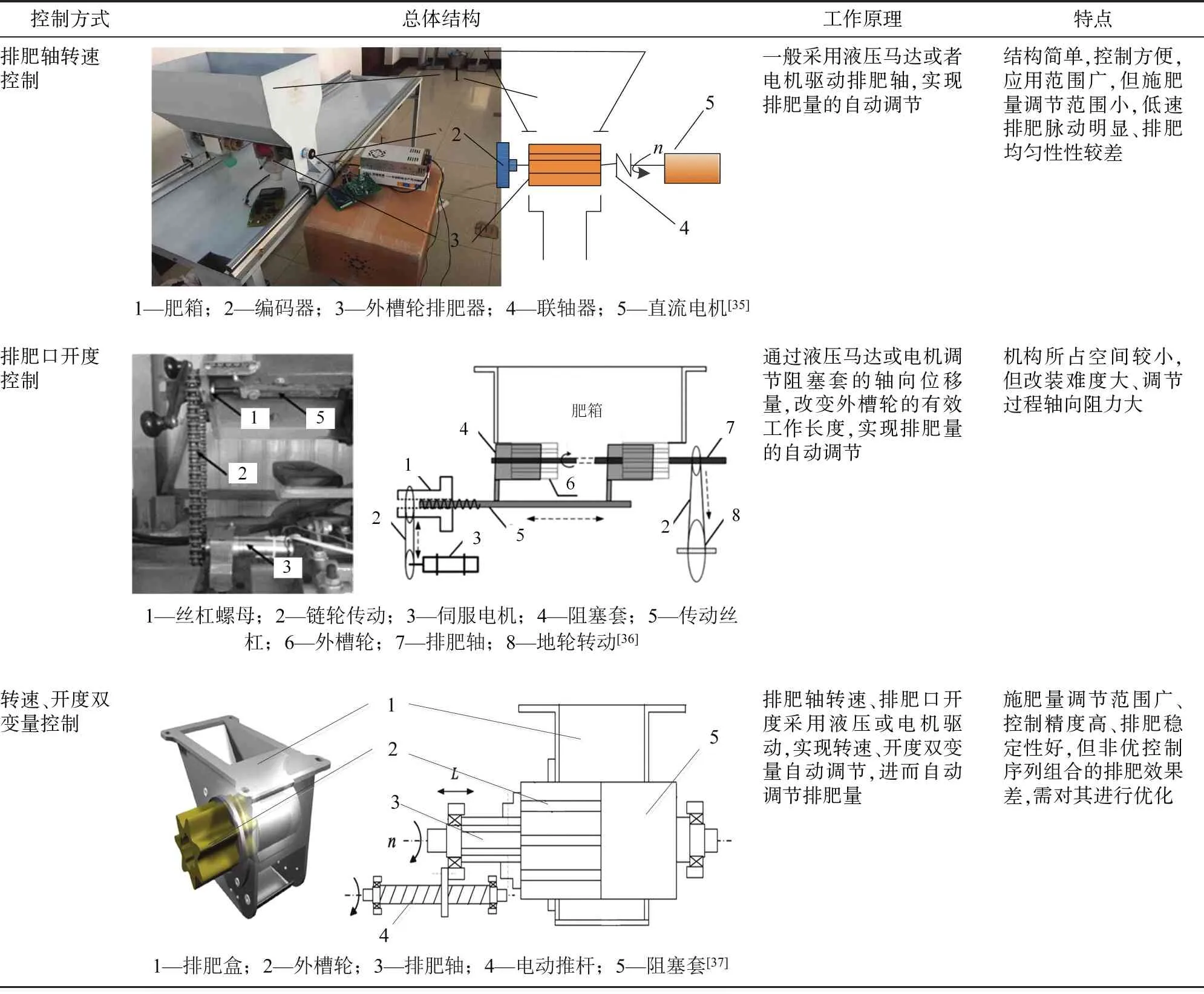
表2 外槽轮排肥器控制特性
2.2.3 排肥轴转速、开度双变量控制技术 排肥轴转速、开度双变量控制方式是指排肥器的排肥轴、排肥口均可自动调节施肥量,通过将转速、开度原有的手动或机械驱动方式改造为液压或电机自动控制方式[47-48]。由于排肥轴转速、排肥口开度以及排肥量的关系不再是线性关系,且非优控制序列组合的排肥效果较差,因此对双变量控制方式的研究主要集中在排肥量控制模型构建以及控制序列优化方面。古玉雪等基于高斯过程(gaussian process,GP)算法构建外槽轮排肥轴转速、排肥口有效工作长度和排肥量之间的预测模型,构建多目标优化问题模型,并提出控制序列优化方法,验证了双变量控制方式的优越性[49-50]。陈满等基于近地光谱监测技术和模糊PID控制技术,设计出一种轴分段式冬小麦双变量精准施肥机,采用Bisquare估计稳健回归方法分析双变量施肥控制模型[51-52]。赵学观等发现,影响充肥特性的主要参数即为排肥轮转速、排肥口开度、排肥轮倾角[53]。为了进一步扩展双变量施肥装备的适应性,提高施肥量控制准确性和稳定性,张季琴等开发出一种排肥单体独立双变量施肥控制系统,基于广义回归神经网络(general regression neural network,GRNN)算法构建螺旋外槽轮排肥器的排肥量预测模型,提出一种基于分解的差分进化算法(multi-objective evolutionary algrithm based on decomposition,MOEA/D)对控制序列进行优化,并取得较好的控制效果[54-56]。
排肥轴转速、排肥口开度双变量控制方式与单一变量控制方式相比,可以通过转速和开度组合的协调控制,避免施肥量较小时排肥轴转速过低带来的排肥脉动问题以及转速过高时带来的施肥精度低和种子破损问题,可以有效扩展施肥量的调节范围,提高施肥量控制的准确性和稳定性[57],对该类设备的研发、系统集成及控制技术的研究已成为当前变量施肥技术研究的重要内容。
3 作业监测技术
完善的变量施肥作业监测系统是保证作业可靠的关键。变量施肥作业监测技术主要包括对作业工况,如机具位置、作业车速、肥箱余量等的检测和排肥量的检测。目前变量施肥作业过程中工况信息的监测技术已经相对较成熟,但颗粒肥流量的在线监测仍是一个难点。
3.1 工况监测技术
为了保证变量施肥装备的正常作业,变量施肥机作业工作过程中需要对影响作业的信息进行监测,对作业过程中的故障进行报警。国内外学者对变量施肥工况监测技术进行了大量研究,已实现变量施肥机的行进速度、位置、肥箱余量、下料口开度、撒肥盘、排肥轴转速等的检测,以及对堵塞故障的报警。主要研究成果见表3。

表3 工况监测技术
最初变量施肥装备的作业车速通过在地轮安装霍尔效应传感器进行检测,随着GPS、GNSS定位系统的普及,机具定位和行进速度逐步采用GPS、GNSS进行检测,测速精度能够达到0.1 m/s,水平定位精度能够达到0.01 m。肥箱余量的检测一般通过在肥箱底部或肥箱内侧安装传感器进行检测,但田间作业环境复杂,作业振动、环境光线等因素均会影响其检测精度,目前余量检测精度能够到达到95%以上。撒肥圆盘、排肥轴转速的检测主要通过在驱动轴安装增量式编码器进行精确检测,检测精度由编码器型号决定;肥箱底部下料口开度主要通过编码器检测排肥动盘转角获得,条播施肥机的有效工作长度采用位移传感器,检测精度较高,应用较成熟。堵塞报警检测已经较成熟,堵塞检测精度能够达到100%,满足变量作业的使用要求。
3.2 排肥流量监测技术
固体颗粒肥排肥流量的实时监测是进行变量施肥闭环控制以及作业效果在线评价的关键,变量撒肥机的排肥量可以根据肥箱质量以及下料口开度进行预测,但变量条播机按行作业,其复杂的肥料特性以及非接触式测量要求,使得条播机颗粒肥流量在线监测仍然是一个难点。
现有固体颗粒肥排肥流量的检测方法主要有间接检测法和直接检测法。间接检测法包括排肥轴转速间接测量、肥箱体积预测;直接检测法包括称质量法、电容法、图像法、微波法。其检测原理及主要特点见表4。
间接检测法中,基于排肥轴转速的排肥量间接测量方法应用最广泛。通过标定模型,对排肥量进行预测,受不同肥料充肥性能差异、故障等影响,检测精确度较低。基于肥箱余量的预测方法,根据排肥过程中肥箱剩余体积变化差值对排肥量进行预测。其中,基于单线激光雷达的检查方法检测时,首先采用单线激光雷达扫描获取肥箱余量表面特征,并对肥箱余量体积进行三维重构,通过计算一定时间间隔内的体积变化量,即可获得排肥量[74]。但其检测精度受排肥速度影响,单位时间排肥量较小时,肥箱余量体积变化不大,检测精度较低。此外,这种检测方法只能对肥箱的整体排肥量进行预测,当1个肥箱连接多个排肥器时,无法对单行排肥情况进行准确检测。
直接测量方法中,基于称质量法的颗粒肥流量检测传感器体积较大,结构复杂,须要对被检测装备做较大的改装。因此,进行田间应用推广有一定的难度。基于电容法开发的流量传感器,体积小,质量轻,能够直接安装在肥管上,对单行颗粒肥流量实现在线检测,但容易受作业温度、肥料湿度以及发动机电磁波等影响。图像法需要获取清晰有效的落肥颗粒图像,但实际作业环境较复杂,灰尘、肥料粉末等容易覆盖镜头,影响图像采集质量。基于微波多普勒法开发的流量检测传感器具有结构简单、安装方便,检测时不干扰流体等特点,逐渐受到专家学者关注。为了进一步提高颗粒肥流量检测精度,专家学者对噪声去除方法进行探索,如卡尔曼滤波去噪[80]、小波阈值去噪[82]、基于经验模态分解(empirical mode decomposition,EMD)的小波阈值去噪法[83],以及干扰抑制方法,如单元平均恒虚警(cell average constant false alarm rate,CA-CFAR)干扰抑制方法[79]等。经过改进,微波多普勒法室内检测精度能够达到99.80%~97.20%,田间试验检测精度能够达到91.42%[83]。

表4 颗粒肥流量检测技术
4 分析与展望
目前我国颗粒肥变量撒施控制技术研究存在以下主要问题:第一,变量控制技术发展不均衡,系统通用性较差。我国变量撒施控制技术研究较早,撒肥量控制、工况监测等技术较成熟;由于不同作物变量条施机的结构差异较大,变量控制、肥管内颗粒肥流量在线监难度较大,变量条施控制技术相对不成熟。此外,研发的变量控制系统缺乏标准的通信协议和接口,导致不同系统之间不兼容,系统通用性较差。第二,系统集成度不高,智能化水平有待提高。我国现有变量撒施机的研究以中小型为主,变量撒施控制和工况监测的研究相对独立,集成变量控制与工况监测的系统较少。对于肥料撒施控制的研究以直线作业方式为主,缺乏对复杂作业环境和不同作业轨迹自适应控制方法的研究。第三,市场化程度低,适应性有待提高。目前,我国对于变量施肥技术的研究主要集中在科研院所,主要针对变量控制技术难点问题的攻克,技术向产品的转化较少,研制出的成熟产品不多。此外,我国不同地区地形地貌差异较大,种植模式多样,进而对变量施肥系统的适应性提出更高的要求。
为了进一步提高我国变量施肥装备的性能,促进变量施肥技术发展,可以从以下几个方面进行突破。第一,扩展故障监测对象,研究故障预警技术。目前工况监测中对故障的监测主要集中在肥管堵塞等方面,变量施肥装备各部分的运行状态均会影响作业效果,完善故障监测体系、扩展监测对象能够提高系统无障碍工作时间,提高作业效率。进行故障预警技术研究,有助于提前发现设备问题,节省故障解决时间。第二,攻克变量条施机颗粒肥流量在线检测难题,研究闭环控制技术,加强施肥数据的收集与分析。颗粒肥流量在线检测是实现变量施肥闭环控制的前提。攻克颗粒肥流量在线检测技术有助于肥料施用信息的收集和分析,以及对变量施肥系统作业性能进行在线评价。第三,研究自适应控制技术,提高系统的兼容性和适应性,并促进技术转化和推广。研究不同作业轨迹自适应变量控制方法,提高变量施肥系统对不同作业环境的适应能力。确立变量施肥设计行业规范,统一软件设计标准、通信协议,提高变量施肥控制系统的兼容性。积极探索技术转化模式,促进变量施肥技术产业化、商品化。第四,研究无人机变量撒肥技术。无人机具有机动灵活、操纵简单、成本低、获取影像速度快、地面分辨率高等优点。随着无人航空技术的普及,无人机已经在土壤和作物长势信息获取方面得到广泛应用。通过研究无人机变量撒施技术,可以实现对山地、不规则田块等区域的变量施肥作业,进一步丰富我国变量施肥装备体系。
