穿戴式跌倒预测装置设计
2022-11-15张博文李爽庞春颖
张博文,李爽,庞春颖
(长春理工大学 生命科学技术学院,长春 130022)
截止到2021年5月我国老年人为2.6亿,占总人口18.7%,随着社会老龄化的加剧,到2050年,预计我国65岁以上老年人口数将到达4亿,占中国人口30%以上[1-2]。随着年龄的上升,老年人身体素质逐渐变差,摔倒是老年人群中比较突出的现象,经调查发现,65岁以上人群中每年有1/3的老年人发生一次及以上的跌倒,80岁以上的老年人群在一年中跌倒的概率会达到50%[3-4]。为防止日常活动中出现跌倒状况,有必要对老年人进行日常监测,对于跌倒进行预测。
目前,国内外跌倒检测的仪器有很多,基于使用不同的传感器,跌倒检测产品可以简单分为三类方法:(1)基于视频传感器检测;(2)基于周围信号检测;(3)基于穿戴式仪器检测[5-6]。本文设计的是基于穿戴式系统的检测方法,该方法可以随时随地对使用者进行监护,不易受外界影响,而且不会侵犯用户隐私。穿戴式传感器利用无线通信技术,能够将采集到的体征参数传输到上位机进行特征提取、特征分类、跌倒预测模型建立,然后进行跌倒预测,对于监护老年人的跌倒以及跌倒预测具有重要意义[7-8]。
1 系统设计
系统分为硬件设计和软件设计,硬件设计包括数据采集电路设计和数据传输模块设计,软件设计包括单片机程序设计和跌倒预测程序。系统总体方案框图如图1所示。
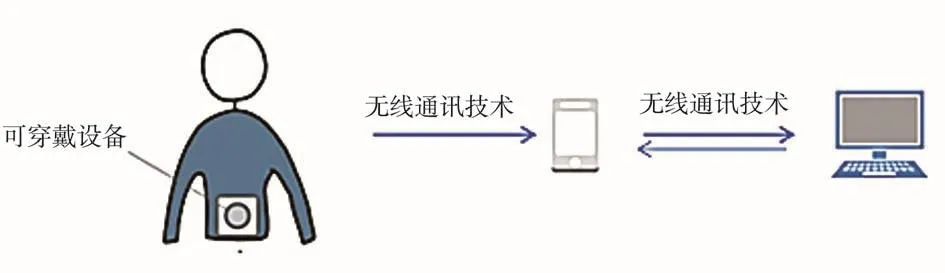
图1 整体框图
1.1 对象系统硬件设计
为了不影响用户的日常行为活动,故采用穿戴式装置进行信号采集,本设计的硬件部分主要包含信号采集、信号处理、数据传输以及电源模块。
1.1.1 传感器放置位置
本文既需要对跌倒进行预测也需要对步态特征进行提取,为后续的步态特征分析以及跌倒预测因素相关性分析提供运动信息,所以要对传感器的放置位置进行考量与实验。
人体运动可以看作是肢体绕着关节的运动。为了对人体运动过程进行具体的数学分析,需要构建合理的人体模型来描述人体运动,且该模型必须能代表人体运动核心的部分,因此本文将人体组成进行合理的简化,在建模过程中用人体骨架系统来描述人体的运动。人体骨架系统模型是将人的肢体看作刚体,模仿人的生理结构,通过关节将这些简化的刚体相连,从而得到简化的人体结构[9-10],经过对人体等效模型的研究[11],最终确定将携带一枚传感器的主板放置于腹部,对跌倒预测提供信息来源,另两枚传感器分别置于脚踝处采集步态信息,实物图如图2所示。

图2 传感器放置位置实物图
1.1.2 采集电路设计
根据人体运动信号采集原理,加速度传感器是根据压电效应的原理来工作的。一般加速度传感器就是利用了其内部的由于加速度造成的晶体变形这个特性。人体在走路时,通过加速度传感器就可以采集到人体的运动信息,经过无线传输到芯片进行处理。本设计采用一块放置于腹部的MPU6050传感器对跌倒进行预测,采用两枚分别放置于左右脚踝的MPU6050传感器采集步态信息。检测模块的实物图和原理图如图3和图4所示。
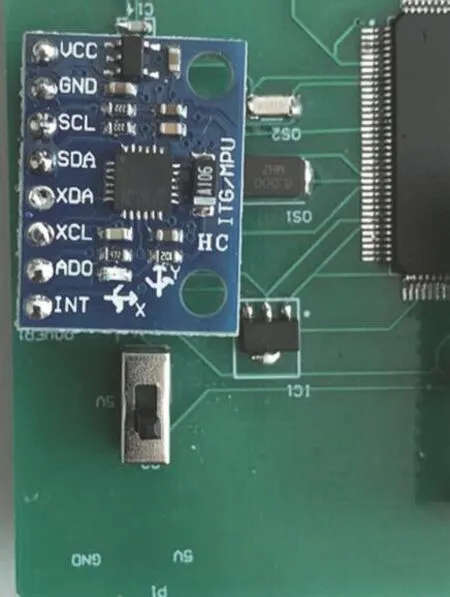
图3 运动信号检测实物图
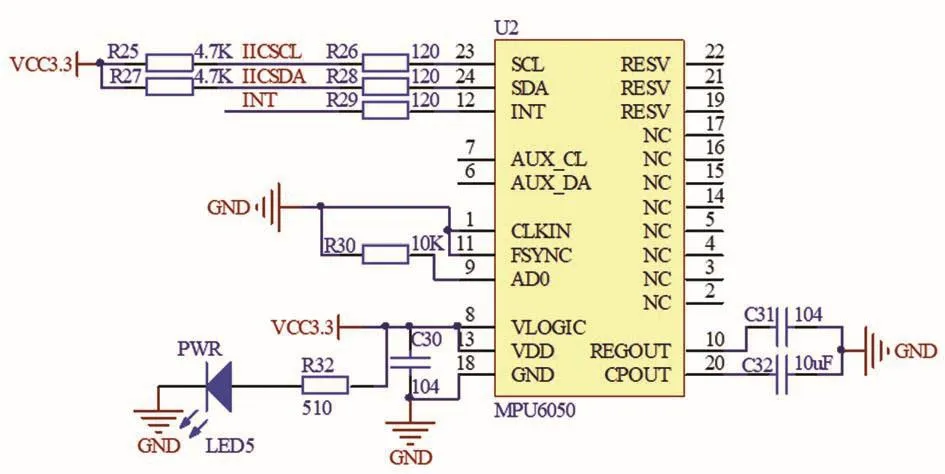
图4 运动信号检测原理图
1.1.3 数据处理模块设计
数据处理模块与放置在腹部的传感器相连,作为采集系统的主板,主板被放置于用户腹部,由于在设计模块上考虑到功耗、硬件大小以及数据采集的稳定性与可靠性等,所以采用STM32F407系列单片机作为系统CPU,该单片机接口丰富且低功耗、性能高,清凉小巧的硬件设计能实现复杂的功能要求同时也能保证数据有很高的稳定性和可靠性。
1.1.4 数据传输模块设计
系统采集到的生理信号需要在手机端进行显示,选用蓝牙模块作为数据传输的媒介,本研究选用HC-08蓝牙模块传输数据,它具有80米的超长通信距离,以及超低功率和小尺寸等优点,完全满足设计需要,适用于所有Android系统手机通信,具体实物图和原理图如图5和图6所示。
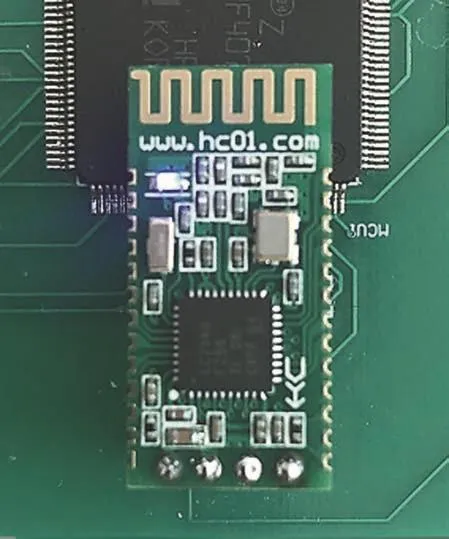
图5 蓝牙模块实物图
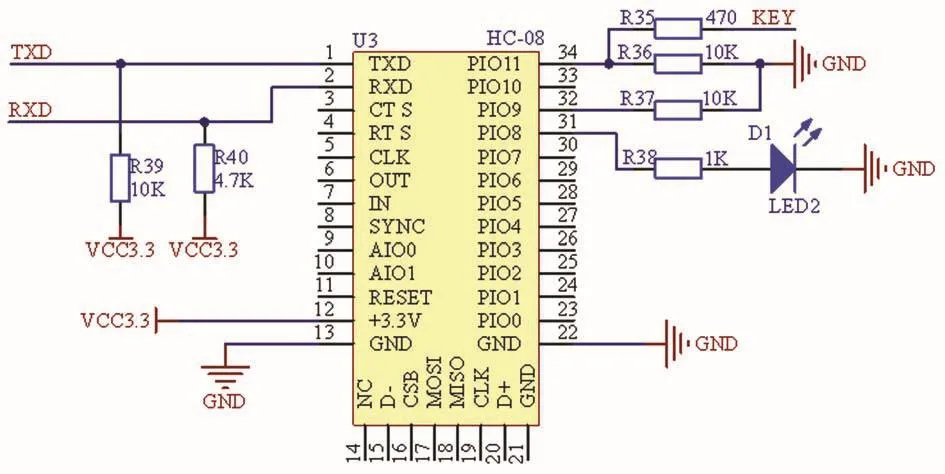
图6 蓝牙模块原理图
1.1.5 电源模块设计
系统在设计电源电路时应根据各个模块的所需电压合理供电,必须确保电源电路产生的电压在每个模块的供电范围之内。首先考虑中央处理器STM32F407ZGT6的工作电压,其范围为1.8~3.6 V;其次MPU6050模块供电可选择2.5 V、3.0 V或3.3 V,蓝牙模块所需供电为2.0~3.6 V,其他器件的所需电压均在3.3 V左右。考虑到系统的体积与电源所产生的电磁干扰,系统统一使用3.3 V电压为电路所有器件供电,减小了系统电路板的体积并降低了电磁干扰。
由于系统是可穿戴设备,系统需长期使用,电池应具备体积小、容量高的特点,锂离子电池体积小、寿命长、对人体危害小,所以使用3.7 V可充电锂离子电池为系统供电,电池容量为800 mAh。电源模块电路图如图7所示。
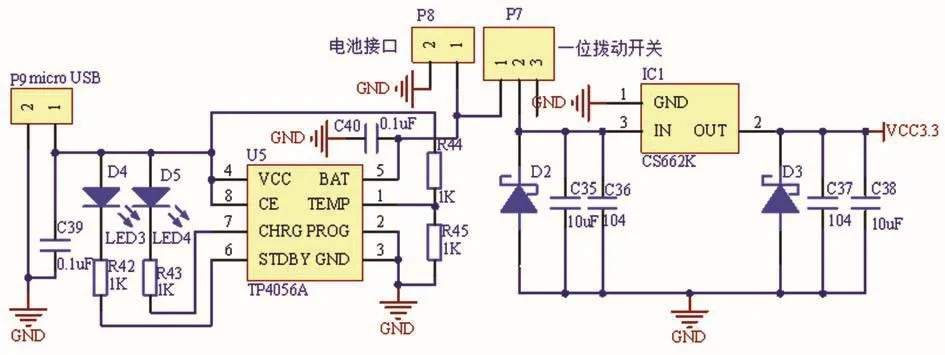
图7 电源模块电路图
1.2 系统软件设计
系统软件设计包括三个部分:单片机程序设计、上位机跌倒预测算法和Android手机端软件设计。单片机主要负责信号采集、处理与传输;上位机负责基于支持向量机的跌倒预测算法设计;手机端负责监控结果显示与异常参数报警等功能的实现。
1.2.1 单片机程序设计
首先由于人体运动信号的频率变化小于20 Hz,根据奈奎斯特采样定理,最大程度还原原始的生理信号,采样频率必须大于信号中最高频率的2倍以上,这样采样得到的数字信号才能完全保留原始信号中的数据信息[11],一般实际应用中保证采样频率为信号最高频率的5~10倍。本文设计的传感器采样频率为100 Hz。
本研究在软件程序编写部分,运动信号通过MPU6050传感器进行采集,MPU6050通过IIC单片机进行通信,IIC1的SCL、SDA与STM32F407ZGT6的PB8、PB9相连;IIC2的SCL、SDA与STM32F407 ZGT6的 PB10、PB11相连;IIC3的 SCL、SDA 与STM32F407ZGT6的 PA8、PC9相连;IIC总线连接的从设备都有一个可以被单片机识别的地址,单片机通过识别该地址来判断从设备初始化状况。当传感器芯片的AD0引脚为低电平时,芯片地址为0X68,判断地址为0X68则初始化成功。运动状态采集的软件流程图如图8所示。
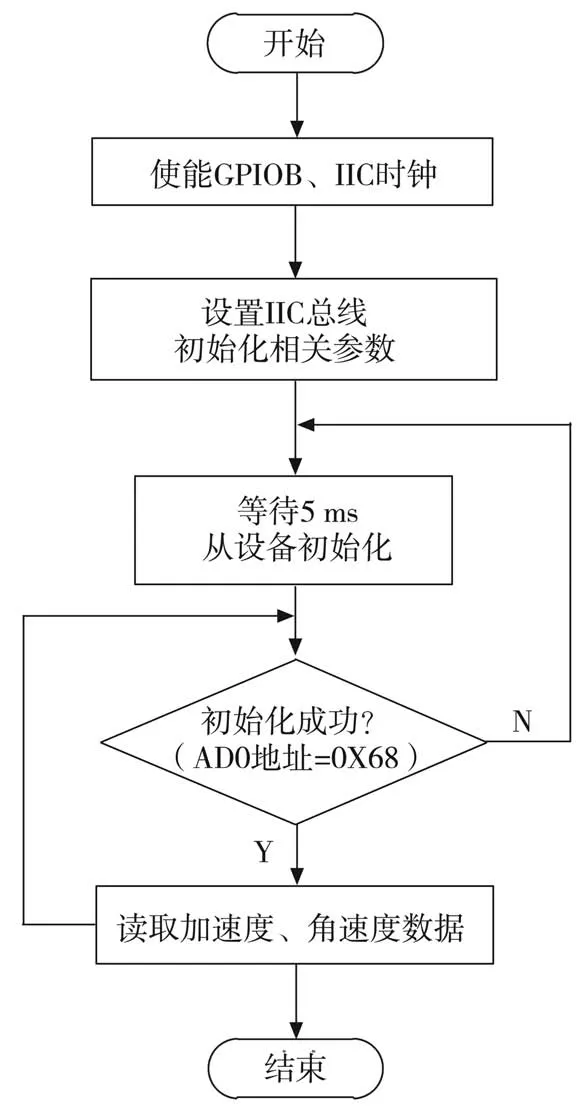
图8 IIC通信流程图
根据人体运动时加速度与角速度变化规律,设置传感器的采样频率为100 Hz,加速度满量程范围为±2 g,角速度满量程范围为±2 000 dps,当初始化成功之后系统即可进行数据采集。
1.2.2 跌倒预测算法设计
跌倒预测算法是跌倒预测系统的关键部分,目前跌倒预测算法的研究趋势是采用机器学习的方法。机器学习专门研究用计算机模拟或实现人类的学习行为,机器学习是目前实现人工智能的关键,跌倒预测问题可以作为一个二分类问题来处理,即区分跌倒行为和日常活动行为,属于监督学习[13-14]。本文的跌倒算法是基于支持向量机算法实现的,算法实现流程如图9所示。
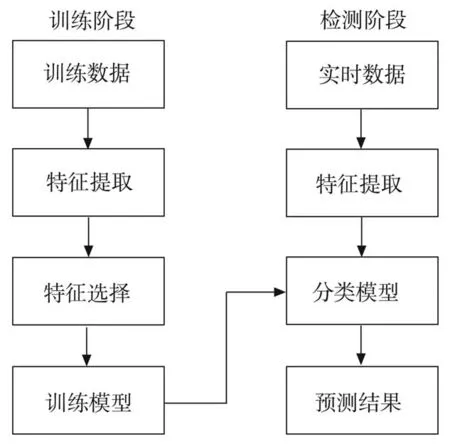
图9 分类算法流程图
在进行跌倒预测之前,通过对数据进行特征提取及标注,来对支持向量机进行训练。本文共设计了八个特征,分别是y轴上的加速度平均值 Acc-Yave,z轴上的加速度最大值 Acc-Zmax,x轴和 y轴上的加速度偏度 Acc-Xske、Acc-Yske,陀螺仪绕y轴和z轴的旋转速率峰值Gyro-Ykur、Gyro-Zkur,加速度计轴的斜率SL以及能量熵EEB。
计算公式分别如下所示:

其中,N为时间窗口长度;ej为第j个子块与整个窗口信号总能量的比值。
本文要对完整的运动过程进行实时采集,为了不影响采集动作的连贯性,采用了滑动窗口进行特征提取,防止单个窗口对采集的数据进行分割,因此本文采用了叠加度为50%的滑动窗口对运动数据进行处理。
1.2.3 Android手机端程序设计
在手机端部分,本研究采用目前应用比较广泛的API为28的智能手机作为基础,编写手机APP程序。程序编写软件采用的是Android Studio。
Android手机端,作为人机交互的唯一终端,实现用户注册、登录、生理参数实时监测、健康分析、医疗服务、在线咨询等功能。手机APP功能框图如图10所示。
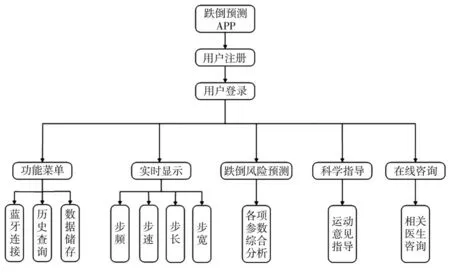
图10 手机app功能框图
登录成功后进入健康管家APP主菜单。主菜单UI设计采用的是GridView,GridView按照行列来显示内容,一般用来同时显示图片与文字,如实现九宫格图。因此,为了让界面更加清晰美观,本研究采用GridView来实现主菜单功能显示。主菜单界面如图11所示。

图11 主菜单功能界面
2 实验结果分析
本文根据跌倒预测的原理以及分析老年人日常生活中的各种行为,把老年人的行为分成两类:一类是日常活动部分ADL(Activities of Daily Life);另一类是跌倒行为FALL(Fall Down)。跌倒行为具体分为:坐着时向后倒(BSC)、站着时向前倒膝盖着地(FKL)、站着时向前倒用手支撑着地(FOL)、站立时双腿弯曲朝后倒(SDL)。跌倒行为具体分类图如图12所示。
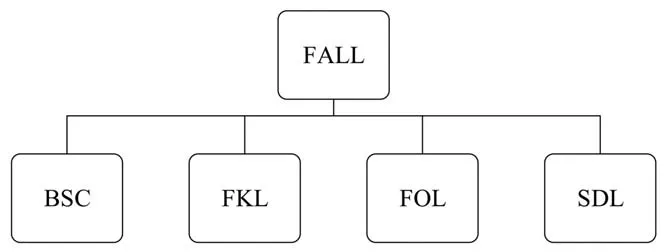
图12 跌倒行为具体分类图
为了校验仪器装置和算法的可靠性与正确率,做了 5种实验:(1)正常行走;(2)坐在椅子上时向后倒;(3)站立时向前倒,膝盖着地;(4)站立时向前倒,用手抑制着地;(5)站立时双腿弯曲向后倒。出于安全考虑,模拟实验由同学完成。
(1)实验者正常行走或做其他正常动作,包括下蹲、跳跃等。正常行走下仪器采集到的加速度和角速度数据如图13和图14所示。
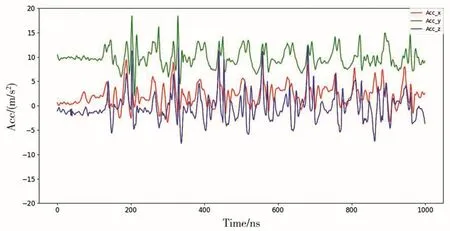
图13 正常行走加速度图
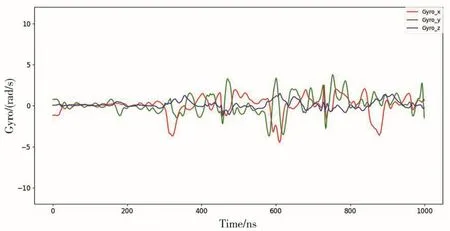
图14 正常行走角速度图
(2)让实验者坐在椅子上时向后倒下时仪器采集到的加速度和角速度数据如图15和图16所示。
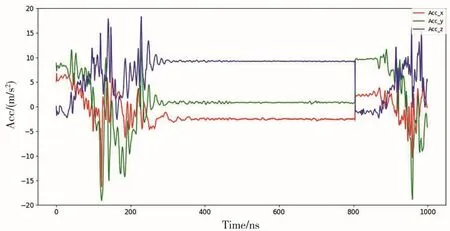
图15 坐在椅子上向后跌倒加速度图
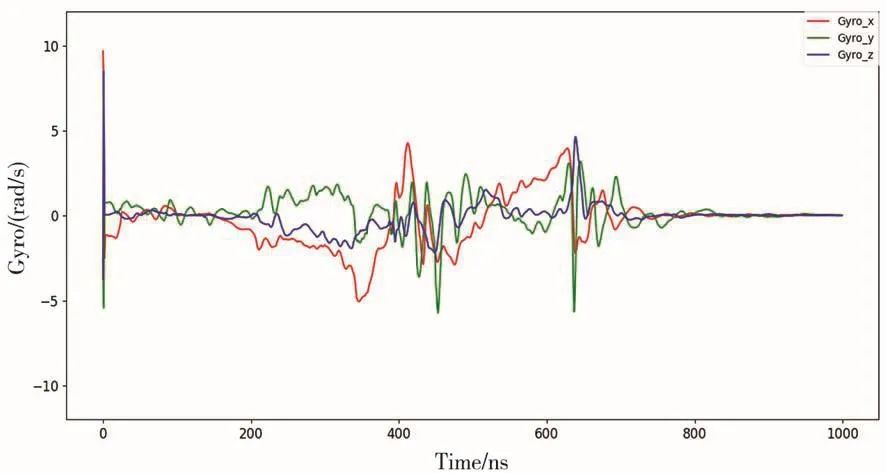
图16 坐在椅子上向后跌倒角速度图
(3)让实验者站立时向前倒下并以膝盖着地时仪器采集到的加速度和角速度数据如图17和图18所示。
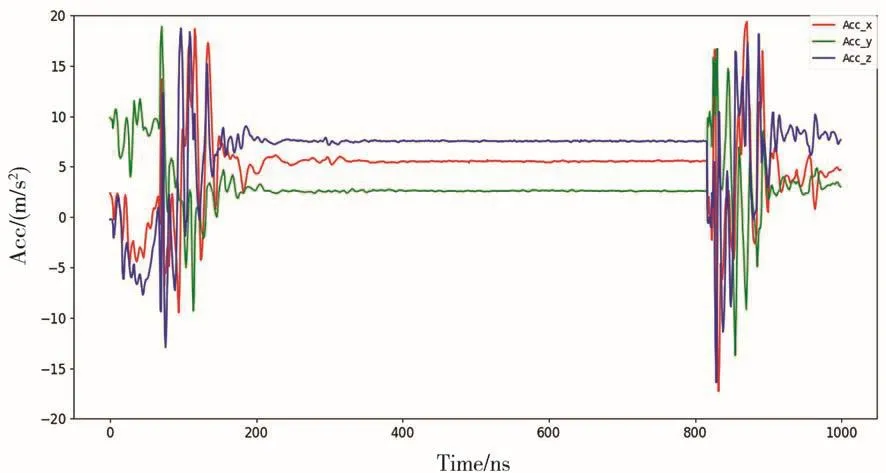
图17 站立时向前跌倒膝盖着地加速度图
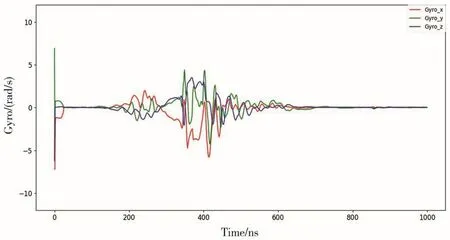
图18 站立时向前跌倒膝盖着地角速度图
(4)让实验者站立时向前倒下并以双手抑制跌倒时仪器采集到的加速度和角速度数据如图19和图20所示。
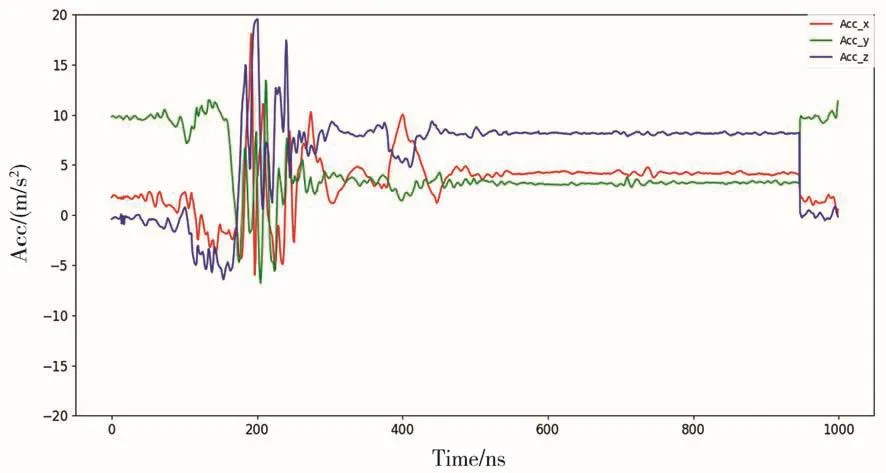
图19 站立时向前跌倒用手抑制着地加速度图
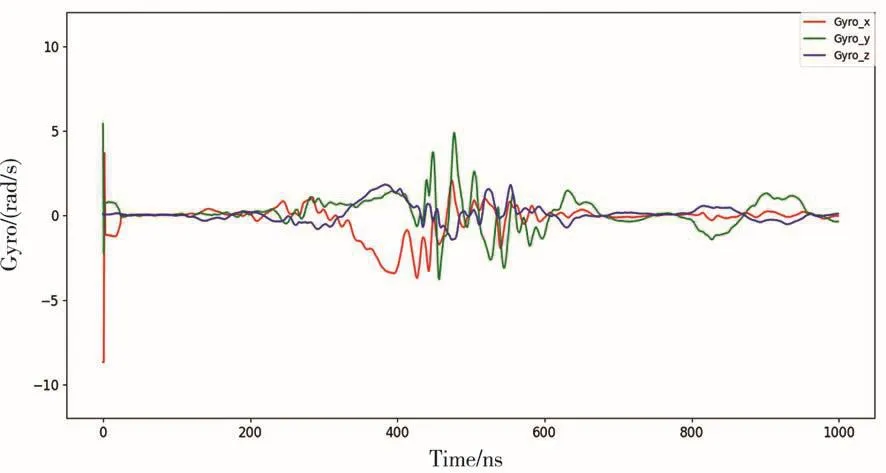
图20 站立时向前跌倒用手抑制着地角速度图
(5)让实验者站立时弯曲双腿向前倒时仪器采集到的加速度和角速度数据如图21和图22所示。
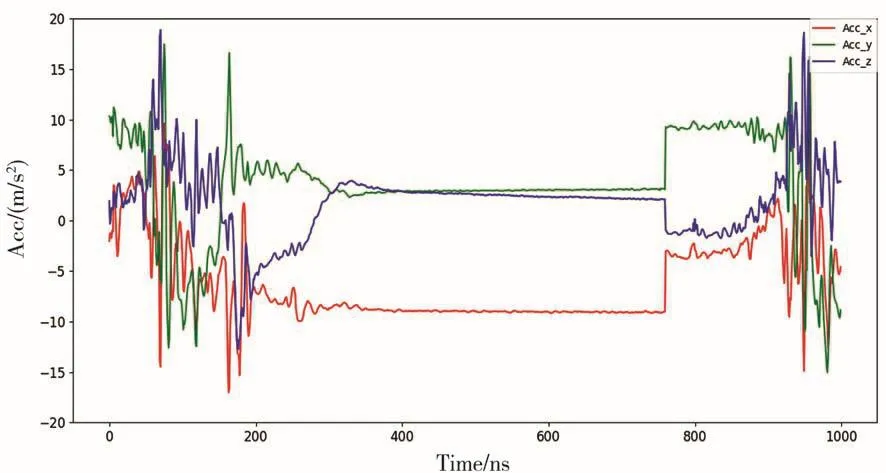
图21 站立时双腿弯曲向外倒加速度图
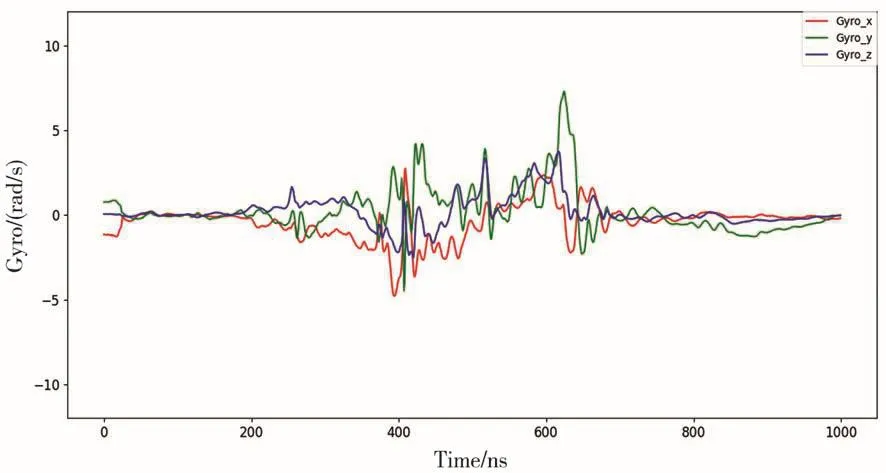
图22 站立时双腿弯曲向外倒角速度图
实验测试结果如表1所示,从结果可以看出,该装置可以对日常行为与跌倒行为进行预测,并对不同的跌倒行为进行有效的区分,系统跌倒预测准确率在90%以上,识别率较高。
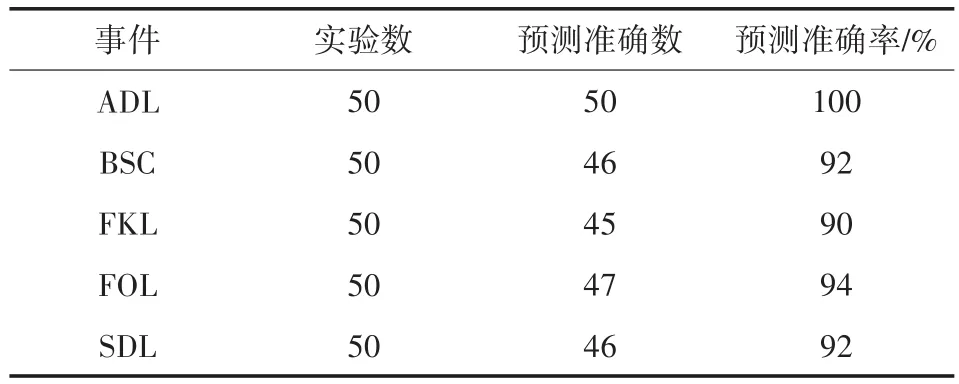
表1 测试结果
对于跌倒预测模型建立时,本文将数据库中2/3的数据进行训练,1/3的数据用于验证,从表一可以看出,对于日常行为的预测准确率很高,对于跌倒具体行为的预测准确度还有待提高,可以通过增加训练集中跌倒的样本来提高识别准确率。
3 结论
通过对人体运动行为与跌倒预测原理的研究[15],设计了穿戴式跌倒预测装置,通过MPU6050传感器采集运动信息,并通过Android手机发送到PC端进行支持向量机算法处理,跌倒预测的准确率达到91.18%。本设计可以将预测的结果等实时发送到手机app中,方便老年人随时查看运动信息,医护人员可以通过定期采集到的运动数据给出相关的运动和饮食意见等,给老年人带来更大的便利和健康。
