论无人机高精度定位与视觉自动跟踪融合技术
2022-11-15李密林旭陈佳期曾远强卢雨畋
李密,林旭,陈佳期,曾远强,卢雨畋
(福建省海峡智汇科技有限公司,福建 厦门 361000)
输电线路在电网系统中发挥着重要作用,并直接影响着广大人民群众的日常工作和生活。我国是一个幅员辽阔的国家,不同地区的地势条件也有着较大差异,有些输电线路甚至存在于极为复杂的地理环境中,一旦其受到破坏,整个电力系统便无法正常运行,那么为了保证电力传输系统的稳定性,企业就必须配置专业人员对输电线路进行及时、有效的巡检。以往巡检人员人为操作的方式需要投入较多的人力和物力,并且耗费时间较长,外界的环境条件一旦发生变化便会对其产生不利影响,因此,无人机电力巡检技术便应运而生了。如果想要人工有效操控无人机,对巡检人员是有着很高要求的,其必须能够熟练使用各类无人机操作技术,显然这在实际工作中并不容易实现。因此,在电网系统的实际运行过程中建议采用全自动式的无人机巡检技术,该技术能够完整且准确地收集相应采集数据,并保证了巡检工作的实际效率和质量,在其发展过程中是需要相关配套技术作为支持和保障的,如高精度定位技术和计算机视觉跟踪技术等,运用RTK定位技术能够有效改善信号传递进程中易出现定位偏差的问题,利用相机能够实时掌握线路的巡检情况,同时利用先进的图像处理软件还能够掌握准确的位置信息,自动进行拍摄和导航。另外,SLAM技术也具有重要的应用价值,面对未知环境该技术能够构建基于传感器设备的地图信息,并对其精准定位和快速导航。当然,目前无人机自主巡检技术发展到现在并不是绝对的完善,遇到建筑物过于集中或是视线不佳的情况时,如果无人机仅仅依靠相机这类设备进行定位和导航显然是不够的,其通常都很难及时避开障碍物,并且精度也无法保证,在室外环境下不建议采用这一方案。所以,应合理运用基于多传感器融合使用的SLAM定位技术,保证无人机运行的稳定性,提升其导航能力,在实际工作中最常见的为IMU与视觉传感器融合技术。
1 相关理论的研究
1.1 SLAM跟踪理论
在整个SLAM系统中,跟踪是其核心的工作进程,利用相机等设备将图像实际特征提取出来并高速进行匹配,对相机的每一帧都进行及时追踪,并科学估计无人机运行过程中的位置和状态,出现问题及时调整和优化。相比于SIFT和SURF等图像特征的运算工作,ORB的实际特征运算量是最少的,利用CPU计算便能够获得最接近于真实值的特征效果,而ORB特征还具有旋转恒定性和尺度恒定性等显著特点,如果SLAM系统计算过程中需要实时的数据信息,建议选择ORB这一图像特征。其具体的提取方法为先构建若干层的特征金字塔,依据金字塔的层数变化情况确定图像特征的数量情况,两者成一定的反比例关系,即金字塔层数越多,图像特征的数量就越少。可以采用以下的方法有效分配金字塔中每一层的图像特征:假设金字塔的实际高度为H,而金字塔最底端那层的图像像素宽度为W,尺度因子为s,那么利用简单的公式便可以计算出第n层的金字塔面积和金字塔的总面积,如果特征的提取点数为N,那么N与金字塔总面积的比值便是单位面积内提取的特征点数,这一比值与该层金字塔面积相乘之后的值则可以得到每一层分配的特征点数。
笔者在研究中选用的金字塔高度为8,而尺度因子为1.2,那么便可以得到ORB图像特征的提取流程。具体为:先确定FAST的角点。将阈值设为T,以待确定的像素点p为圆心画一个半径为3的圆,如果圆周上n个点的像素值小于待确定像素点像素值与阈值的差或是大于两者之后,那么就可以确定待确定的这个像素点为角点,如图1所示。
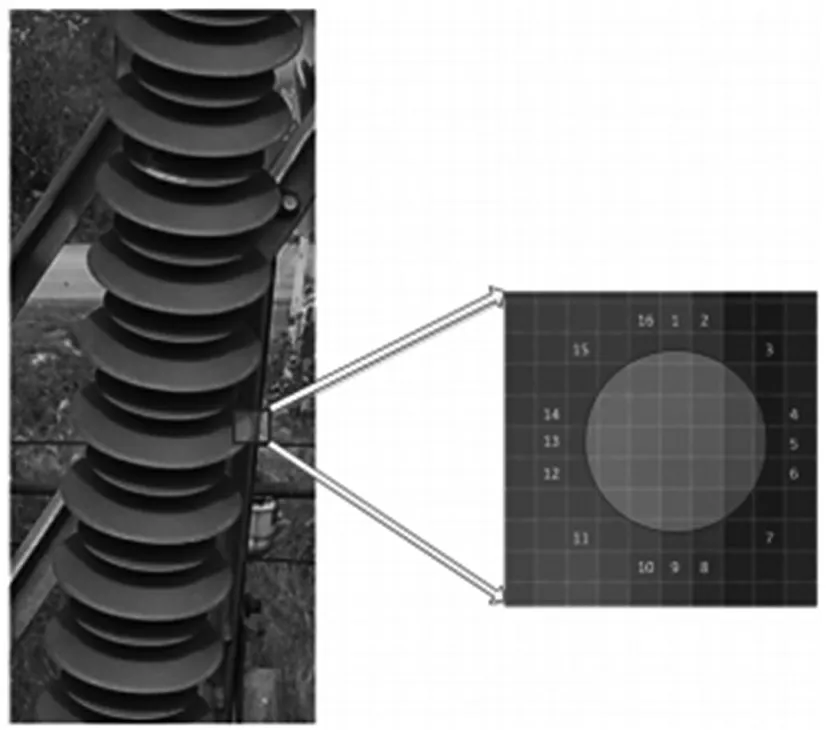
图1 FAST的角点提取
之后便可计算rBRIEF描述子,以刚才提取的FAST角点为中心,确定图像邻域的范围值为31×31,在这一邻域中选择5×5的平均灰度来代替每一个像素,之后便可以得到若干个对比的像素块,通过比较每两个像素块便能够得到具有一定长度的二进制编码。在考虑到均方差最大原理的影响下,通过对比、分析并筛选出的256对二进制编码实际上就是rBRIEF描述子。之后便应进行算法的初始化工作,根据相应特征合理匹配拍摄到的相邻两帧的图像,如果获得的匹配特征点数不足,那么就说明跟踪存在问题,应重新继续拧定位,并进行初始化。算法初始化工作完成后应建立相应的坐标系,将从当前图像帧中提取的图像特征与原点进行匹配就可以得到下一帧图像的位移数据和旋转角度。利用多视角几何算法就可以得到无人机在当前状态下的位置和姿势情况,并确定了地图的初始点,利用全集束还可以对其进行不断优化和完善。
1.2 局部地图的科学构建
构建局部地图的主要原理便是不断将新的关键帧插入到无人机的跟踪过程中,并且要不断调整和优化局部地图。先确定当前帧是不是所谓的关键帧,如果其就是关键帧,便应将其插入到局部地图中,应遵循以下3个原则来确定关键帧:第一,关键帧之间的间隔数量应多于20帧;第二,当前帧与其他关键帧的匹配点数不应低于50个;第三,关键帧与当前帧的共视点应超过90%。在局部地图中插入完成关键帧后不应立即开始下一步工作,应先将地图中的一些点位清除出去,采用相邻关键帧多视角几何计算的方法就可以得出相应的地图点,同样应遵循以下2个原则确定是否将地图点清除:首先,如果有多于3个的关键帧能够检测到这一地图点,那么就不应将其剔除;其次,在跟踪过程中如果有四分之一的可视帧能够匹配到这一地图点,也不应该将其剔除。
得到所有需要保留的地图点集合后,采取相应的计算方法还可以确定这一集合的空间位置,在地图中将所有新出现的地图点添加进去,优化和完善局部地图点及其位姿信息时建议采用局部集束优化的方法,一些相邻的关键帧中是有着重复地图点的,实际工作中应将其融合成一个点,并对这一关键帧进行及时处理,对所有的关键帧应再详细检测一次,发现有冗余的关键帧应立即将其清除。
2 基于RTK的多传感器融合
结合无人机精准定位导航巡检工作的具体要求,在研究工作中应利用EKF技术构建与无人机运行过程相对应的运动学模型,同时利用RTK多传感器融合技术不断提升无人机定位导航工作的实际精度,并在确定的SLAM系统方案中将得到的定位信息输入进去。
2.1 人机运动的模型设计
文章在重点参考ROS开发包的基础上确定了无人机的模型状态数量,其状态向量是维度15,滤波器则主要分为IMU、RTK、气压计和超声4大输入模块,第一个模块能够为系统提供精准的位置姿态信息,而RTK模块则能够准确发现水平方向上错误的位置信息并进行及时修正,其所构建的状态变量示意图如图2所示,其中X、Y、Z分别是位置坐标信息,3个角度符号分别代表俯仰角、偏航角和翻滚角。
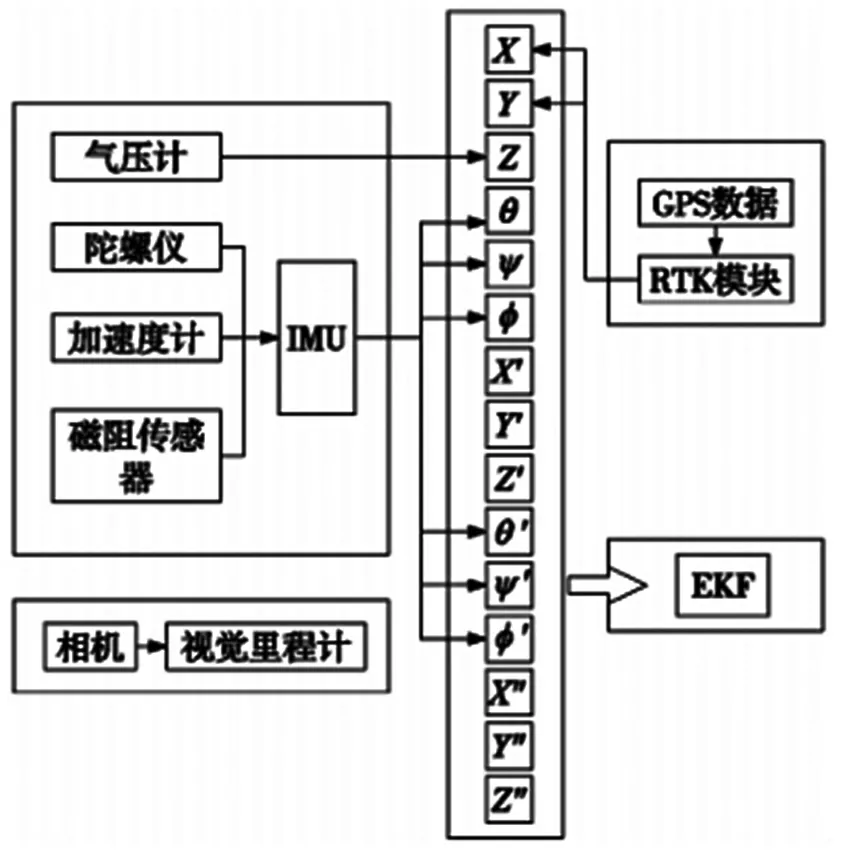
图2 所构建的无人机运动学模型
2.2 EKF参数设定
在SLAM系统运行过程中使用扩展卡尔曼滤波算法并结合无人机的实际定位坐标信息,而传感器的数据则会根据上图中所构建的无人机运动学模型进行组合,从而形成状态向量的初始值和滤波器协方差矩阵及噪声协方差。如果在某一时刻SLAM系统发生了变化,那么无人机的位置坐标信息也会随之发生变化,由于滤波器的工作标准和流程与EKF是保持高度一致的,那么就能够估计出滤波器下一个时间段的运行状态,利用系统函数求导的方法能够大体计算出均方误差的预测结果和最后的预测结果。假设输出结果维度为某一个固定值,那么就能够预测出下一个时刻的位姿信息并更新其测量向量,同时分别更新测量残差、测量残差协方差。卡尔曼增益、状态估计值和EKF方差等值。
2.3 导航系统构成
在实际工作中要想保证SLAM在系统中的高效、稳定运用,那么就会产生很大的计算量,所以,相机就应发挥出视觉里程计的作用,并采用SLAM对获得的数据和图像进行处理,数据和图像处理完成后可采用EKF算法实现与传感器观测到的数据有效融合,这样便得到了下一个时刻的位姿信息并在无人机控制系统中将其输入进去。在明确了预测值与当前位置在姿态和距离等方面的差异值后,控制系统应准确判断当前位置是否在所设置的阈值范围内,如果不在阈值范围内就应及时调整飞行的姿态和路线。
3 实验验证及分析
对导航系统的工作性能进行测试和验证时应在室外环境下进行,相关人员应先合理设置无人机的飞行轨迹,之后在无人机处理后端上运行扩展卡尔曼滤波器,利用蓝牙等媒介将得到的融合数据及时传送给无人机的控制芯片,将阈值设定为0.5,如果无人机飞行到距离的预计位置在阈值的范围内,便可在系统中输入下一个时刻的位置,利用PID算法还能够实时调整无人机的飞行位置。实验验证时可让无人机先从地面起飞,在其绕行电塔一周的过程中进行拍摄,确定好其飞行轨迹,由于可以同时得到采用融合数据的EKF导航飞行轨迹和采用RTK的导航飞行轨迹,应对2种飞行轨迹进行详细的对比和分析,其具体的飞行轨迹如图3所示。
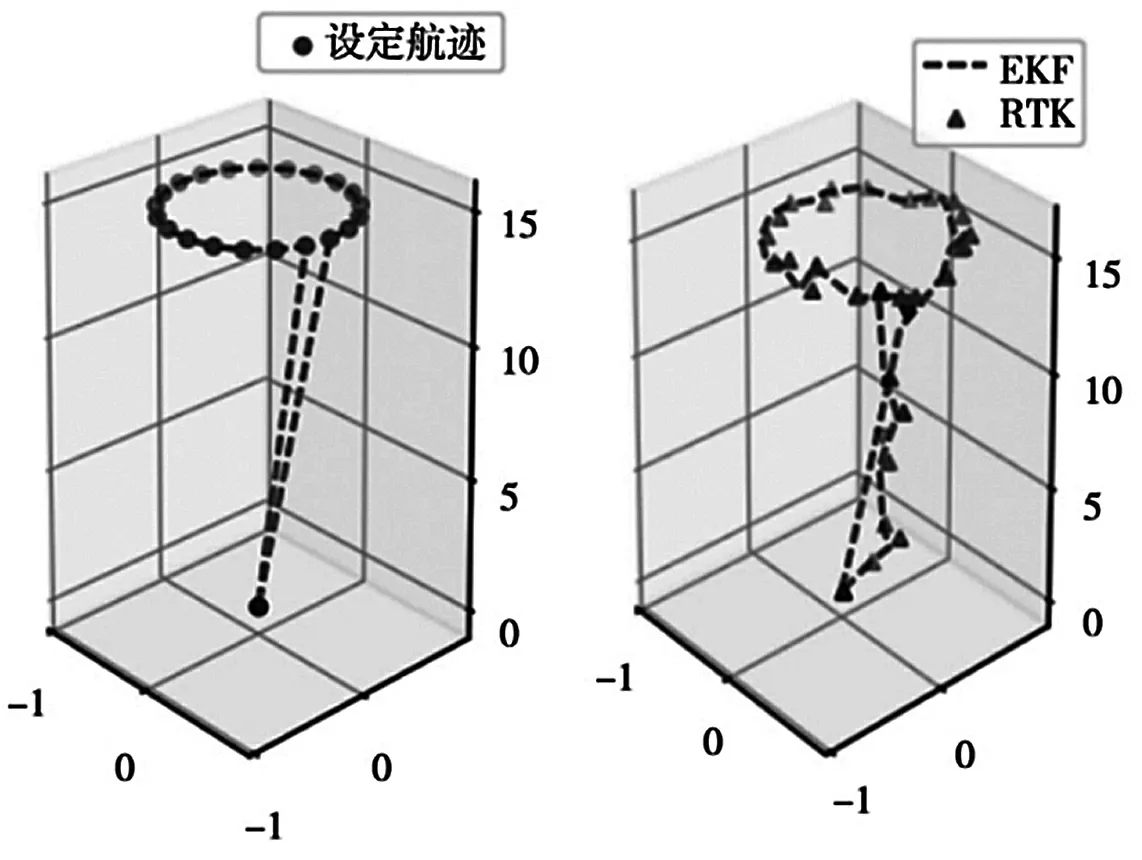
图3 试验测试的轨迹图和设定轨迹图
将融合数据EKF的飞行轨迹和RTK的飞行轨迹与设定的飞行轨迹进行对比,可以看到前者与设定飞机轨迹的平均误差值和最大误差值都要更小一些,也就是说运用SLAM融合视觉系统并借助融合数据EKF进行输出能够大大提升无人机导航系统飞行的稳定性和实际精度,当然也存在着一些问题,如无人机在水平方向上飞行或是在起飞和降落时会产生更大偏差,这主要是由于水平飞行时或是无人机起飞降落时会受到更大的空气阻力,并且风的因素也会对无人机的飞行产生较大干扰,那么在Z轴方向上就能够看到无人机产生明显抖动,那么与水平方向相比就会产生更大的平均误差。对无人机飞行过程中采用的EKF和RTK 2种定位方式分别进行采样,能够得到每一个坐标轴的波形图,并在实验中发现无人机在X轴和Y轴的图像上产生的振荡更大,产生的误差与图3无人机在起飞降落时是一致的。
4 结束语
通过以上的论述,本文对相关理论的研究、基于RTK的多传感器融合和实验验证及分析3个方面内容进行了详细的分析和探讨。文章提出了一种将SLAM系统与RTK定位信息有效结合的无人机高精度定位和视觉自动跟踪技术,在EKF技术的支持下实现了RTK模块数据与SLAM系统数据的有效融合,并可以更加精准地预测无人机的运行状态和输入位姿信息,借助飞行控制模块解析其位姿信息,从而有效控制各类硬件设备并优化当前状态下无人机的飞行状态,提升无人机导航定位工作的稳定性和精确性,保证对电网系统各类电力设备的巡检效果。与普通的无人机GPS定位技术相比,采用这一技术方法无论是在定位精度上还是在跟踪效果上都有了明显提升,并且可以将误差控制在cm范围内。
