基于动态事件触发策略的多AUV 一致控制
2022-11-14胡满江王智炜杜长坤叶俊边有钢
胡满江 王智炜 杜长坤 叶俊 边有钢

摘要:针对多个自主水下机器人(Autonomous Underwater Vehicles,AUVs)编队问题,为了减少多AUV频繁通信造成的能量消耗,提出一种基于分布式动态事件触发的领导者-跟随者一致控制算法.设计一个包含广义位置和载体速度的辅助变量简化AUV模型.同时基于滑模变结构控制、一致性理论及动态事件触发策略,设计了分布式编队控制器,保证系统在存在外部扰动的情况下可实现一致控制目标.证明了所提出的控制算法没有Zeno现象.数值仿真验证了所提出定理的正确性和控制算法的有效性.
關键词:自主水下机器人;编队;一致控制;动态事件触发策略
中图分类号:TP18文献标志码:A
Consensus Control of Multi-AUVs Based on a Dynamic Event-triggered Strategy
HU Manjiang1,3,WANG Zhiwei1,DU Changkun2,YE Jun1,BIAN Yougang1,3
(1. College of Mechanical and Vehicle Engineering,Hunan University,Changsha 410082,China;2. School of Mechatronical Engineering,Beijing Institute of Technology,Beijing 100081,China;3. Wuxi Intelligent Control of Research Institute(WICRI)of Hunan University,Wuxi 214072,China)
Abstract:This paper considers the formation problem for a group of autonomous underwater vehicles (AUVs). In order to reduce the energy consumption of communications among AUVs,a distributed dynamic event-triggered leader-follower consensus control strategy is proposed. First,we design an auxiliary variable that includes generalized position and carrier speed,which simplifies the AUV model. Based on sliding mode variable structure control,consistency theory,and dynamic event-triggered strategy,a distributed formation controller is designed. The controller ensures that the AUV system can achieve the formation goal in the presence of external disturbances. Second,no Zeno behavior is exhibited under the proposed control algorithm. Last,numerical simulation results are provided toverify the correctness of the presented theorem and the effectiveness of the proposed control algorithm.
Key words:autonomous underwater vehicles;formation;consensus control;dynamic event-triggered strategy
随着海洋资源争夺的日益激烈,作为海洋探测开发的工具,自主水下机器人(Autonomous Underwater Vehicle,AUV)的研究引起了众多学者的关注.目前,对AUV的研究主要集中在单个AUV的智能控制上.在一些特殊的场合中,单个AUV因功能单一、承载空间有限、无法携带大量配置等,无法完成某些指定任务,如:对某一指定区域进行监测、海底测绘、复杂的战术进攻围捕等.因此,多AUV协同系统的研究日益重要.多AUV系统不是单个AUV的简单叠加,而是涉及通信、队形结构等的编队问题,通过建立合理的编队协同机制,使多个AUV保持期望的位姿,完成特定的任务[1].
目前,编队控制方法多应用于船舶、飞行器、车辆[2-3]等,应用于多AUV系统则相对较少.常见的多AUV编队控制方法分为协调路径跟踪和协调目标跟踪.协调路径跟踪[4]的控制目标是跟踪一个参数化的预定路径,协调目标跟踪的控制目标是跟踪领航者附近的一个参考点或目标点[5].如Cui等[6]研究了欠驱动AUV在水平面上运动的领航者-跟随者(Leader-Follower)编队控制问题,其中跟随者根据领航者的位置和预定的队列跟踪参考轨迹,而无需领航者的速度,减小了通信负担.Millan等[7]将AUV视为单车模型,利用运动学关系和泰勒公式展开定理,对单车模型进行线性化处理,保持编队转弯能力,使编队通过跟踪共同参考航线向目标方向航行.高振宇等[8]将AUV不确定模型参数及海洋扰动视为复合扰动,设计了复合扰动观测器,实现对扰动的精确估计,而后基于反步法提出一种固定时间编队控制律,使编队在固定时间达到期望队形.需要注意的是,上述方法均需要领航者信息,通过跟踪领航者或者跟踪依靠领航者信息生成的预设路径,以实现渐近稳定的编队控制,本质上都是跟踪问题.此外,上述方法要求多AUV间进行连续通信,并在每一个采样时刻将自身AUV的状态广播给邻居.连续通信会带来较高的通信负担和能量消耗,这对作业中只能依靠自身携带能源的AUV来说是一个不小的负担.因此,在满足控制性能的前提下,减少通信次数具有很强的现实意义.
近年来,基于事件触发的编队控制策略得到了广泛研究.该控制策略在AUV满足特定触发条件时才会对其邻居广播自身的状态信息,并同时更新自身的控制律,可有效降低通信负担和能量消耗,为解决上述问题提供了有效手段.
目前,事件触发的编队控制研究多集中于多智能体系统[9-13]和车辆队列[14-15]系统.Behera等[16]采用事件触发策略,利用滑模控制解决了受外部干扰的非线性系统的鲁棒镇定问题.Li等[17]提出了一个新的事件触发方案,解决了非线性动力学和时间变化延迟的多智能体系统的共识问题.Liu等[18]通过构造底层变量,设计了拉格朗日系统的事件触发控制策略,并结合滑模控制方法,解决了无向图下具有拉格朗日动力学的多智能体系统的共识问题.Gao等[19]针对AUV平动模型,通过间歇性采样进行通信机制设计,并结合反步法设计了AUV触发策略,实现了基于领航者-跟随者的固定时间AUV编队控制.Su等[20]考虑AUV的水平面模型,基于事件触发策略,运用反步法设计了具有外部不确定性的固定时间编队控制器,通过仿真验证了用于多AUV系统的固定时间事件触发编队协议的有效性.
上述研究所采用的均为静态触发策略.为了增大触发时刻间隔、进一步降低通信负担,动态事件触发策略得到了关注,通过设计动态参数,让触发阈值随状态的变化而改变,有效地增加了触发间隔.Yi等[21]针对一阶系统的一致控制问题,设计了两种动态事件触发策略,并提出了自触发算法,仿真结果表明,动态触发策略可有效降低能耗.Du等[22]针对一阶跟随者-领航者跟随问题,首先提出了集中事件触发机制;然后,通过引入内部变量设计了分布式动态触发策略,在两种情况下,根据设计的事件触发规则排除了Zeno现象.
本文研究基于动态事件触发策略的多AUV一致控制问题,主要贡献包括:首先,提出了一种动态事件触发通信策略,根据触发时刻的AUV与邻居的状态改变动态参数,让触发阈值随状态的变化而改变.在设计的控制策略中,AUV只在满足触发条件时才会对邻居广播自身的状态信息,并同时更新自身的控制律,该策略可以显著减小AUV之间通信造成的能耗.其次,基于一致性理论、滑模变结构控制方法,设计了考虑环境干扰的多AUV鲁棒一致控制器,并通过构建辅助变量简化了控制律的设计过程.最后,利用反证法,证明了触发间隔存在一个严格大于0的数,排除了Zeno现象.
1预备知识与问题描述
1.1符号和图论
文中用到的符号如下:
设无向图G的拉普拉斯矩阵L=[lij]∈RN×N定义为:
L=D-A
其中,L矩阵的元素定义为:
对角矩阵B定义为:
当第i个跟随者与领航者连通时,ai0>0;否则,ai0=0.
1.2问题描述
对于一个领航者-跟随者系统,用下标i = 0表示领航者AUV,i = 1,…,N表示跟随者AUV.基于领航者间歇性运动,考虑多AUV编队的一致问题.在领航者间歇性运动间隙,领航者固定不动,只发送自身状态信息.AUV的运动可以通过地面坐标系G-abc和载体坐标系O-abc两个坐标系来描述.
假设1在AUV中,一般横倾运动都是自稳定,因此忽略横倾运动对AUV的影响,即横滚角恒为0.纵倾角范围为[-π/6,π/6].
假设2AUV是上下、左右、前后高度对称的模型;AUV低速运行,低速情况下AUV的水动力参数近似看作不变;重心与浮心重合;AUV工作在海面以下,故忽略海风、海浪对AUV的影响,仅考虑海流,其大小有界且缓慢变化.
假设3跟随者间的通信拓扑图G无向且连通.
AUV运动学方程[23-24]为:
AUV动力学方程[23-24]为:
定义cosψi=cψi,sinψi=sψi,cosθi=cθi,sinθi=sθi,有
1.3控制目标
本文的控制目标是设计基于动态触发的跟随者AUV控制律,当领航者AUV保持静止时,使其与领航者AUV保持期望的相对位置与相对姿态,即
式中:η0(t)=Ω,用来表示领航者AUV的固定状态信息,Ω为5维常数列向量;vi(t)∈R5×1;d10∈R5×1代表跟随者,与领航者之间期望的相对位置与相对姿态.后文中η0(t)简写为η0.
注1为了形成不同的队形,控制目标设置为各个跟随者AUV与领航者AUV分别保持不同距离和不同姿态角偏差,跟随者的载体速度收敛到0.
2分布式动态触发一致性协议设计
本节针对AUV编队的一致性问题,提出一种结合分布式控制器与动态触发律的分布式动态事件触发一致性协议.排除了Zeno现象,保证了协议的可行性.
2.1控制器设计
为实现AUV编队的一致性,受文献[18]的启发,针对系统存在外部干扰的情况,采用以下分布式控制器:
注2定义辅助变量ξi(t)来简化AUV模型,根据一阶微分方程的性质,当ξi(t)收敛到一个确定的值T时,vi(t)逐渐收敛到0,ηi(t)逐渐收敛到T.
注3上述設计的控制器把广义位置ηi(t)与载体速度vi(t)的一致控制转化为对辅助变量ξi(t)的一致控制,通过引入参考变量σi(t)构建上层参考模型,利用滑模控制保证ξi(t)对σi(t)的跟踪效果,进而实现编队的一致性.
注4通过引入ξi(t)和σi(t)构建分级控制框架,将相邻信息交互与分布式动态控制分离开,简化设计过程.动态触发律基于σi(t)设计,以实现σi(t)一致.相较于同时考虑AUV运动学模型与AUV动力学模型设计控制器,通过引入ξi(t)简化AUV动力学模型,使分布式控制器可以仅在简化后的AUV动力学模型上进一步设计,并通过保证ξi(t)对σi(t)的跟踪效果来实现编队的一致性.
2.2动态事件触发律设计
对于每一个跟随者i,定义状态测量误差:
动态事件触发律设计如下:
结合式(24)、式(25)得:
2.3主要结果
结合式(6)、式(19),得到最终的控制系统为:
定理1在假设1—假设3下,触发律(24)和控制律(19)可以使跟随者系统(28)收敛到指定位姿.
根据式(30),对V1求导得:
由于
将式(34)、式(35)代入式(33),有
将式(41)代入式(40),有
根据式(32),对V3求导,得
将式(38)、式(42)和式(43)代入式(29),有
所以
证毕.
定理2在假设1—假设3下,触发律(24)和控制律(19)可以使跟随者系统(28)无Zeno现象.
由于pi(t)≥0,結合式(26),为保证式(25)一定成立,设定如下条件:
保证式(51)一定成立的情况下,设定如下条件:
可得
与式(50)比较,得在触发律(24)和控制律(19)条件下,可以使跟随者系统(28)无Zeno现象.
证毕.
3仿真研究
本文以4艘跟随者与一艘领航者组成的系统进行编队研究,通过仿真验证所提出定理的正确性和控制算法的有效性.
3.1仿真条件
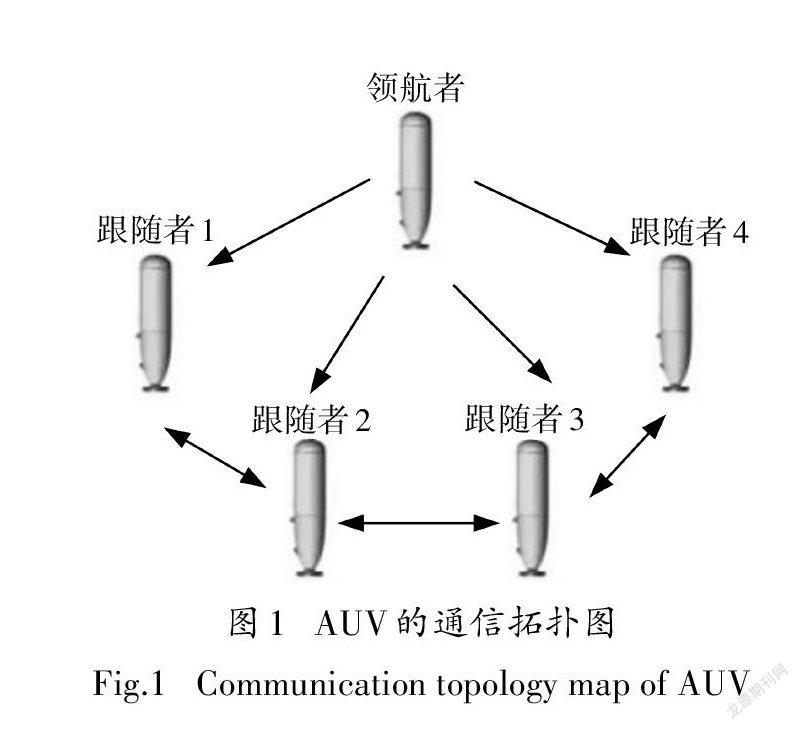
领航者AUV与跟随者AUV同质,AUV动力学方程中的标称矩阵M、C(v)、D(v)参数如表1所示,跟随者AUV的控制系统参数如表2所示,通信拓扑如图1所示.领航者的固定位姿为η0=[0,0,0,0,π/6]T,4个跟随者的初始位姿分别为η1=[-4.5,-5,1,π/6,-π/3]T,η2=[-4,-5,1,-π/6,-π/6]T,η3=[6,-5,2,π/12,π/3]T,η4=[10,-5,3,-π/12,π/6]T.
领航者固定,4个跟随者的初始速度v1=v2=v3=v4=[0,0,0,0,0]T,期望的编队构型d10=[2,2,0,0,0.152]T,d20=[1,4,0,0,0.152]T,d30=[-1,
为体现动态触发策略优越性,对静态触发策略进行仿真.静态触发函数作为动态触发函数的一种特殊情况,当额外动态变量ρi(t)=0时,得到静态触发函数:
静态触发仿真的AUV模型参数见表1,控制系统参数见表3,初始速度、初始位姿、编队构型、通信拓扑、浮力重力以及海洋扰动的选取均与动态触发仿真一致.
注6图1展示了AUV编队通过分布式动态事件触发协议期望达到的最终队形,这里控制目标是使领航者与跟随者从不同平面收敛到同一水平面,纵倾角均收敛为0,跟随者航向角均与领航者的航向角保持各自期望的偏差值.
图1展示了水下机器人之间的通信拓扑关系,其中领航者与跟随者间的通信拓扑用邻接矩阵B表示.
跟随者之间的通信拓扑用拉普拉斯矩阵L表示.
3.2仿真结果
图2为AUV在x、y、z方向上的位置变化.由图2 可知,当时间到达6 s以后,各个跟随者AUV均收敛到期望位置.图3给出了AUV纵倾角与航向角的变化,由图3可知,当时间到达6 s以后,各个跟随者AUV均收敛到期望姿态角.根据图2与图3可以得出,跟随者AUV在本文设计的控制器下可以收敛到期望位姿,AUV编队可以保持期望队形.图4给出了AUV的线速度变化,由图4可知,当时间到达8 s以后,各个跟随者AUV的线速度均可收敛至0.图5给出了AUV的角速度变化,由图5可知,当时间到达8 s以后,各个跟随者AUV的角速度均可收敛至0.图6给出了各个AUV的测量误差与阈值,由图6可知,各个AUV的测量误差与阈值逐渐收敛至0,证明跟随者AUV在本文设计的控制器下可以收敛到期望位姿,AUV编队可以保持期望队形.图7(a)给出了各个跟随者AUV在静态触发策略下的触发时刻,可以看出3 s以后跟随者AUV的触发极其密集,无法达成减少触发次数的目的;图7(b)给出了各个跟随者AUV在动态触发策略下的触发时刻.对比图7(a)(b),可以明显看出,基于动态触发的控制策略显著增大了触发间隔,从而减小了触发次数.图7(b)验证了跟随者AUV在所设计的动态触发控制律下不存在Zeno现象.表4为不同触发策略下的触发次数,由表4可以看出,动态触发策略能显著减少触发次数,节省大量的通信资源.
上述仿真试验验证了所设计的动态触发律与协同编队控制律的有效性与正确性,并排除了Zeno 现象.
4结论
本文研究了基于动态事件触发的AUV分布式一致控制问题.通过一致性理论、滑模变结构控制,设计了基于动态触发的AUV分布式控制策略.通过李雅普诺方程证明了所提出控制律与触发律的正确性,并通过反证法,证明了触发间隔存在一个正定下界,排除了Zeno现象.仿真结果表明,所提出方法在考虑了具有外界干扰的情况下可以让AUV队列收敛到期望位置,与连续通信相比,降低了能耗,减小了通信负担;与静态触发的通信策略相比,触发间隔更大,可进一步减小通信消耗.
在实际工程中,通信数据很有可能出现丢包或延迟的现象,而且实际AUV的执行器具有输出约束,往往指令输入信号与实际执行信号之间存在巨大差异,但这两个问题在本文中均被忽略了.因此,未来的研究工作将集中在:1)考虑丢包和时延对触发控制的影响;2)考虑执行器输入饱和以及故障发生的情况,对控制器进行补偿.
参考文献
[1]余琨,徐国华,肖治琥,等.多AUV协作系统研究现状与发展
综述[J].船海工程,2009,38(5):134-137.
YU K,XU G H,XIAO Z H,et al. Current status and development trend of multi-AUV cooperation system [J]. Ship & Ocean Engineering,2009,38(5):134-137.(In Chinese)
[2] LI K Q,BIAN Y G,LI S E,et al. Distributed model predictive control of multi-vehicle systems with switching communication topologies [J]. Transportation Research Part C:Emerging Technologies,2020,118:102717.
[3] BIAN Y G,LI S E,XU B,et al. Behavioral harmonization of a cyclic vehicular platoon in a closed road network [J]. IEEE Transactions on Intelligent Vehicles,2021,6(3):559-570.
[4]張维刚,张朋,韦昊,等.一种基于LTVMPC改进的无人驾驶汽车路径跟踪控制算法[J].湖南大学学报(自然科学版),2021,48(10):67-73.
ZHANG W G,ZHANG P,WEI H,et al. An improved path tracking control algorithm for autonomous vehicle based on LTVMPC [J]. Journal of Hunan University(Natural Sciences),2021,48(10):67-73.(In Chinese)
[5]刘陆,王丹,彭周华.基于PNDSC的欠驱动AUV编队控制器设计[J].控制与决策,2015,30(12):2241-2246.
LIU L,WANG D,PENG Z H. Formation controller design based on PNDSC for underactuated AUV [J]. Control and Decision,2015,30(12):2241-2246 (InChinese)
[6]CUI RX,SAM GE S,VOON EE HOW B,et al. Leader-follower formation control of underactuated autonomous underwater vehicles[J].OceanEngineering,2010,37(17/18):1491-1502.
[7]MILLAN P,ORIHUELA L,JURADO I,et al. Formation control of autonomous underwater vehicles subject to communication delays [J]. IEEE Transactions on Control Systems Technology,2014,22(2):770-777.
[8]高振宇,郭戈.基于扰动观测器的AUVs固定时间编队控制[J].自动化学报,2019,45(6):1094-1102.
GAO Z Y,GUOG. Fixed-time formation control of AUVs based on a disturbance observer [J]. Acta AutomaticaSinica,2019,45 (6):1094-1102.(In Chinese)
[9]ZHANG Z Q,ZHANG L,HAO F,et al. Distributed eventtriggered consensus for multi-agent systems with quantisation [J]. International Journal of Control,2015,88(6):1112-1122.
[10] DIMAROGONAS D V,FRAZZOLI E,JOHANSSON K H. Distributed event-triggered control for multi-agent systems[J]. IEEE Transactions on Automatic Control,2012,57(5):1291-1297.
[11] YANG P,ZHANG A,ZHOU D. Event-triggered finite-time formation control for multiple unmanned aerial vehicles with input saturation [J]. International Journal of Control,Automation and Systems,2021,19(5):1760-1773.
[12] CAI Z H,ZHOU H,ZHAO J,et al. Formation control of multiple unmanned aerial vehicles by event-triggered distributed model predictive control[J]. IEEE Access,2018,6:55614-55627.
[13] ZHANG G Q,LIU S,LI J Q,et al. LVS guidance principle and adaptive neural fault-tolerant formation control for underactuated vehicles with the event-triggered input[J]. Ocean Engineering,2021,229:108927.
[14] LI Z C,HU B,LI M,et al.String stability analysis for vehicle platooning under unreliable communication links with eventtriggered strategy[J]. IEEE Transactions on Vehicular Technology,2019,68(3):2152-2164.
[15] DOLK V S,PLOEG J,HEEMELS W P M H. Event-triggeredcontrol for string-stable vehicle platooning[J]. IEEE Transactions on Intelligent Transportation Systems,2017,18(12):3486- 3500.
[16] BEHERA A K,BANDYOPADHYAY B. Event-triggered sliding mode control for a class of nonlinear systems[J]. International Journal of Control,2016,89(9):1916-1931.
[17] LI H J,MING C,SHEN S G,et al. Event-triggered control for multi-agent systems with randomly occurring nonlinear dynamics and time-varying delay[J]. Journal of the Franklin Institute,2014,351(5):2582-2599.
[18] LIU X D,DU C K,LU P L,et al. Decentralised consensus for multiple Lagrangian systems based on event-triggered strategy[J]. International Journal of Control,2016,89(6):1111-1124.
[19] GAO Z Y,GUO G. Fixed-time leader-followrer formation control of autonomous underwater vehicles with event-triggered intermittent communications[J].IEEE Access,2018,6:27902-27911.
[20] SU B,WANG H B,WANG Y L,et al. Fixed-time formation of AUVs with disturbance via event-triggered control[J]. International Journal of Control,Automation and Systems,2021,19(4):1505-1518.
[21] YI X L,LIU K,DIMAROGONAS D V,et al. Dynamic event- triggered and self-triggered control for multi-agent systems[J]. IEEE Transactions on Automatic Control,2019,64(8):3300- 3307.
[22] DU S L,LIU T,HO D W C.Dynamic event-triggered control for leader-following consensus of multiagent systems[J]. IEEE Transactions on Systems,Man,and Cybernetics:Systems,2020,50 (9):3243-3251.
[23] XIA G Q,ZHANG Y,ZHANG W,et al.Dual closed-loop robust adaptive fast integral terminal sliding mode formation finite-time control for multi-underactuated AUV system in three dimensional space[J].Ocean Engineering,2021,233:108903.
[24] XIA G Q,ZHANG Y,ZHANG W,et al. Multi-time-scale 3-D coordinated formation control for multi-underactuated AUV with uncertainties:design and stability analysis using singular perturbation methods[J].Ocean Engineering,2021,230:109053.