考虑安全约束耦合辨识的日前发电计划求解
2022-11-14孙宇军王子强赖晓文
袁 泉,孙宇军,张 蔷,王子强,李 鹏,赖晓文
(1. 中国南方电网电力调度控制中心,广东省广州市 510663;2. 北京清能互联科技有限公司,北京市 100084)
0 引言
随着电力现货交易范围不端扩大,发电计划优化的机组数目、电网安全约束的数量随之增加[1-2]。以广东现货市场为例,截至2021 年5 月参与现货竞价的机组有193 台,省内断面超过500 个[3]。为保证电网稳定运行与现货交易有序开展,需要求解大规模的安全约束机组组合(security constrained unit commitment,SCUC)与安全约束经济调度(security constrained economic dispatch,SCED)模型[4]。现货市场交易导致了运行方式更为复杂多变、不同的电网运行边界相互制约的情况,也逐渐成为调度机构关注的重点[5]。
为兼顾发电计划的可靠性和时效性,通常采用直流潮流方程来表达电网安全约束,以提高混合整数规划(mixed integer programming,MIP)模型的求解效率,然后针对SCUC 的计算结果展开交流潮流安全校核[6-7]。尽管如此,由于实际电网的安全约束众多,而且并不是每一种约束都在求解过程中达界,因此,将其全部纳入市场出清的建模和求解过程中会造成较大的计算负担。在实际应用中,通常引入“后验”添加的机制[8],但是这种处理方法可能造成迭代次数增多的问题。如何通过不同约束耦合关系的辨识来辅助发电计划的求解,是一个值得研究的问题。
目前已有部分学者对此问题进行了研究,具体可以分为统计法[9-12]和解析法[13-16]两大类。在统计法方面,文献[9]提出了深度学习辅助安全约束辨识的方法,但仅适用于SCED 的计算。文献[10]将线路越限频次的高低作为辨识的依据,以此缓解约束数量较多造成的计算压力。统计法面临的主要问题是依赖于大量历史数据的获取,且当次优化计算的边界与历史情况差异较大时,适用性有待提高。在解析法方面,文献[13]提出了一种剔除最优潮流冗余约束的方法,采用“先紧缩、后松弛”的启发式搜索思想,将约束的辨识转化为凸优化问题。文献[14]通过求解SCUC 的系列子问题来辨识起作用约束,并将子问题的MIP 模型松弛为线性规划模型,以便于求解。上述解析法的研究对象是含全部安全约束、多时段连续的发电计划初始模型,需要处理的变量和约束的数目仍较多,未充分利用迭代计算的过程信息来简化求解的工作量。
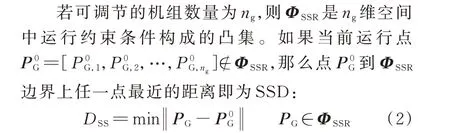
基于上述背景,本文提出了对安全约束耦合关系进行辨识的方法,并辅助发电计划求解。迭代计算过程中出现安全越限时,通过计算运行点到不同安全域的静态安全距离(steady-state security distance,SSD),量化表达不同电网安全约束之间的耦合程度,以此改善发电计划迭代求解过程,并为调度机构分析不同电网运行约束之间潜在的制约关系提供依据。
1 日前发电计划的闭环求解思路
1.1 现货市场环境下日前发电计划闭环计算框架
通过安全约束“后验”添加的方式[7-8]来迭代求解发电计划,可以提高大规模机组组合模型的计算效率。为保障市场组织工作的有序开展,实际应用中还会对市场化机组发电计划的迭代计算次数设置上限。由于边界设置等原因导致无法在规定时间内求得最优解时,需要由调度和交易组织机构调整运行边界或实施安全校正。现货市场环境下的发电计划闭环计算框架如图1 所示。
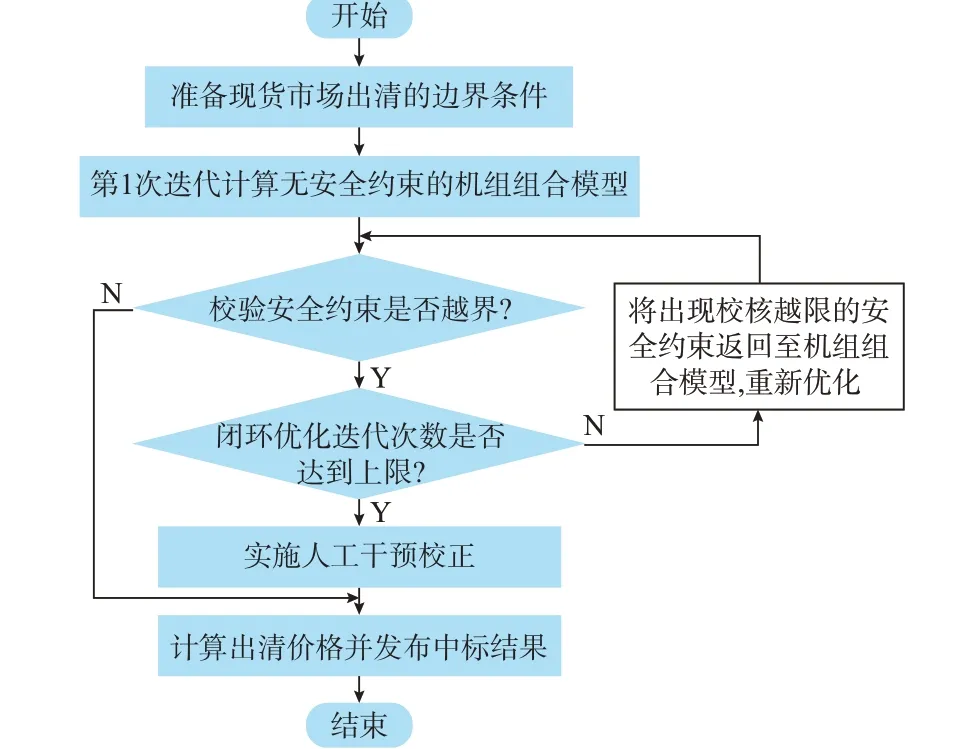
图1 日前发电计划的闭环计算框架Fig.1 Framework of closed-loop calculation of dayahead generation schedule
在现货市场出清的过程中,需要借助市场信息披露的配套机制来保证市场的透明性,有限次迭代计算无解的原因和边界调整的详细内容应纳入运营机构公开披露的信息范畴[17]。
1.2 安全约束反馈机制的改进
市场化条件下,电网运行方式会受到市场主体的报价影响,系统运行的经济性和可靠性协调难度增大,导致系统在边界运行的概率增加。目前,在发电计划迭代计算的过程中,安全约束的反馈机制是:首先,根据当次迭代的安全校核结果,输出安全越限的数值以及对应的灵敏度系数;然后,构造机组出力对于越限约束的线性约束,添加至原来的发电计划模型中进行求解,并在后续的计算过程中保留该约束条件。
当返回当前越限的约束并重新求解发电计划时,如果校核出现新的越限约束,则仍要继续迭代计算。若能在返回当前越限约束的同时预判后续迭代可能出现的越限约束,并将其一并反馈,将有望减少后续迭代计算的工作量。这将为调度机构量化分析不同约束之间的制约关系提供依据。
基于上述思路,最为直观的做法是将在当次迭代过程中潮流接近限值的安全约束也一并反馈[18]。但是由于单条安全约束的负载率这一指标反映的信息有限,未能考虑该约束与其他安全约束之间的作用关系,导致约束反馈的决策难度大、冗余度高。因此,可以从优化原理的角度,量化分析不同安全约束之间的耦合程度,辅助发电计划的求解。
2 安全约束耦合辨识的方法
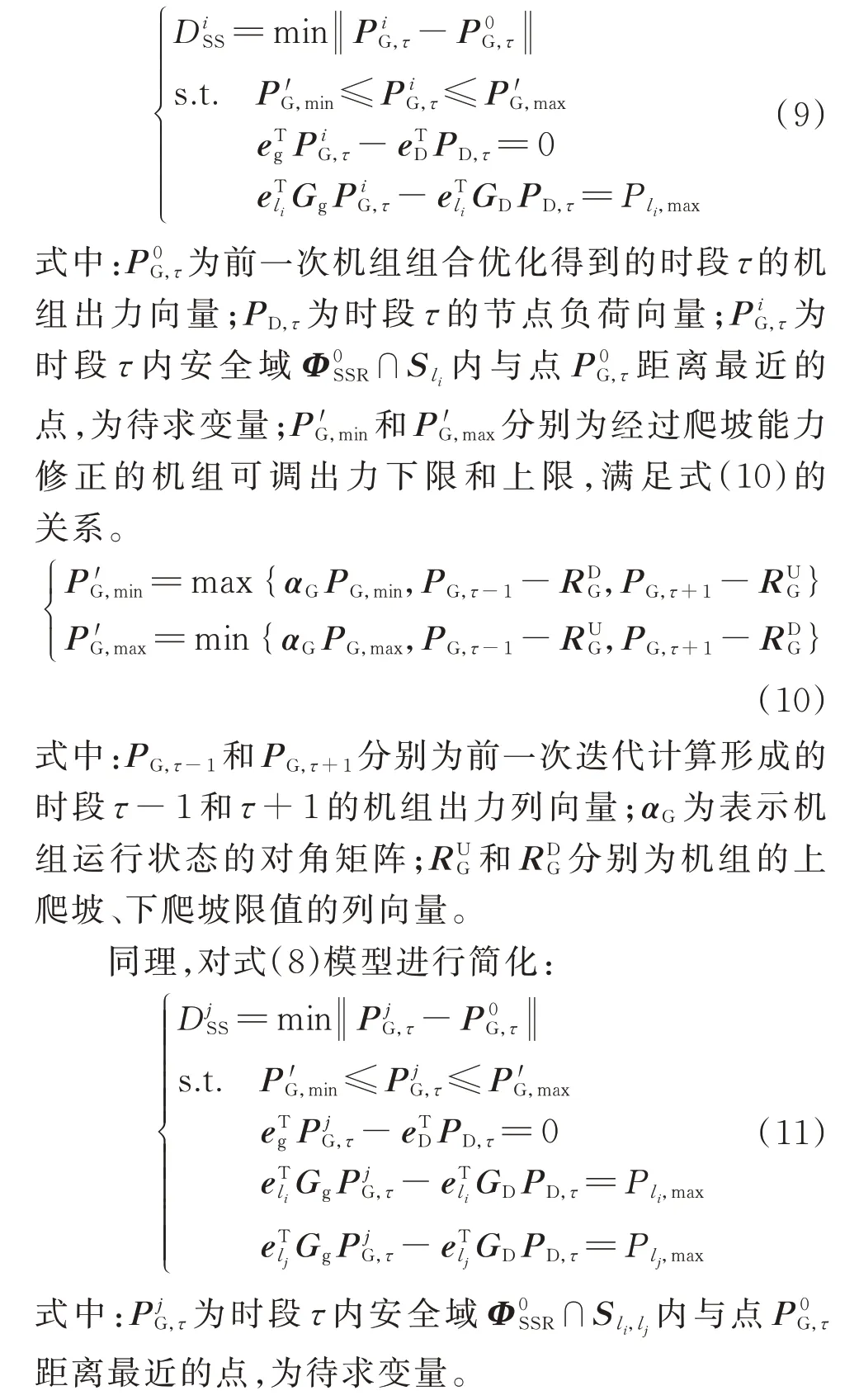
2.1 安全约束耦合距离的概念与模型
满足电网安全约束以及机组可调范围约束的运行空间,称为静态安全域(steady-state security region,SSR)[19-21]:

式中:PG为机组的有功出力列向量;PD为节点的有功 负 荷 列 向 量;PG,max和PG,min分 别 为 机 组 的 最 大 和最小技术出力列向量;PL,max为线路安全约束限值的列向量;Gg和GD分别为机组所在节点的功率转移分布因子(power transfer distribution factor,PTDF)矩阵和全部节点的PTDF 矩阵;eg和eD分别为与机组数目和节点数目相对应的单位列向量。
在式(1)的基础上增加某些线性等式或不等式约束得到的凸集Φ′SSR仍是ΦSSR的一个子集,即Φ′SSR⊆ΦSSR。因此,可以通过增删某些约束条件形成不同的SSR 和SSD,并赋予特定的物理含义。
如果发电计划初始解对应的运行点使得某一安全约束越界,则需要将该约束添加至原来的模型中,然后重新求解发电计划。这种做法的实质是:在当前安全边界的基础上,新增越限的约束,从而形成新的安全域边界,再沿着该运行点向新的安全边界上“距离最近”的方向寻优。
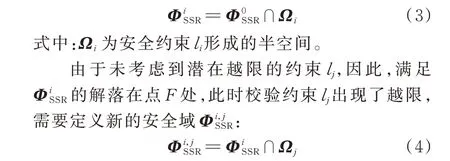
式中:Ωj为安全约束lj形成的半空间,需再进行计算才能得到点A处的可行解。
结合图2 可知,对于当前运行点P0G而言,满足约束li最近的点为F,同时满足约束li和lj最近的点为A,如果两者之间的距离(即图2 中点F至点A的距离)很近,那么仅反馈约束li来求解发电计划,则很有可能导致原来未越限的lj越限。如果前瞻性地不采用仅返回当前越限约束的方案进行寻优,那么可以实现发电计划求解过程的改进。
图2 发电计划的最优闭环计算示意图Fig.2 Schematic diagram of optimal closed-loop calculation of generation schedule
图3 为安全约束li和lj形成的半空间示意图,超出半空间Ωi∩Ωj的边界范围以外的运行点,会使得约束li和lj不能同时满足,从而导致后续的迭代计算。同时使得安全约束li和lj达到运行边界的运行点集合Sli,lj可以表示为:

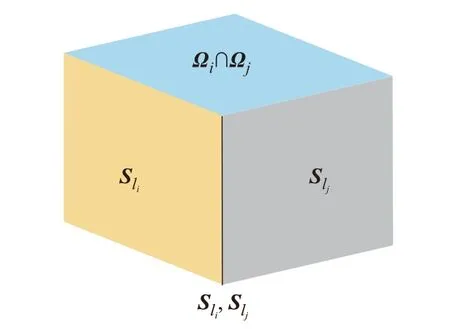
图3 安全约束li和lj形成的半空间Fig.3 Half-space formed by security constraints li and lj
式中:Sli为安全约束li达界的超平面;Slj为安全约束lj达界的超平面。

2.2 安全约束耦合距离的计算
为计算当前越限的约束与其他未越限的约束之间的耦合距离,需要求解含线性约束的二次规划(quadratic programming,QP)问题。由于日前发电计划包含多个时段,为简化耦合辨识模型的复杂度、提高计算效率,在式(7)和式(8)求解的过程中考虑以下2 个方面:
1)除了li和lj以外的安全约束先不纳入QP 问题进行求解,得到式(7)和式(8)的解PiG和PjG以后,再校验其是否满足其他安全约束,据此判断解PiG和PjG的可行性。
2)在时段选择方面,如果发电计划存在多个时段越限,那么以SSD 作为衡量标准,选择越限程度最大的时段展开耦合距离辨识。
经过上述处理后,针对越限程度最大时段τ,式(7)模型简化为:
根据式(6)、式(9)和式(11)计算得到已越限的约束与其他未越限约束的耦合距离后,将不为0 的距离按大小升序排列,再选择耦合距离靠前的约束与越限约束一并返回机组组合的迭代优化。如果式(11)模型无解,或者式(11)的解校验后不满足其他安全约束的要求,说明在安全域范围内,无法找到使得约束li和lj同时达界的点,暂时无须反馈lj。
2.3 安全越限约束的耦合辨识
理论上,不考虑安全约束的发电计划求解确实有可能出现2 条或以上的安全约束同时越限,需要针对本文方法进行适应性的拓展。
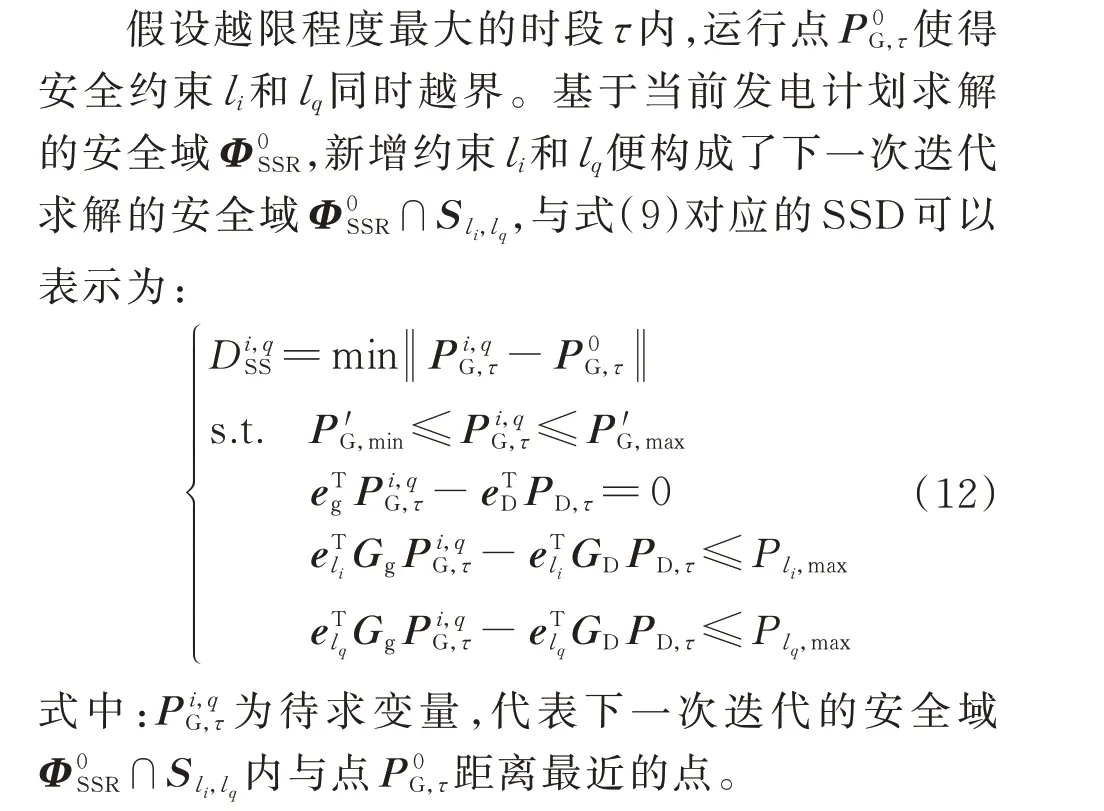
为了辨识当前未越限的约束lj与约束集合{li,lq}的耦合关系,需要在式(12)的基础上纳入lj达界的约束,求取如下SSD:
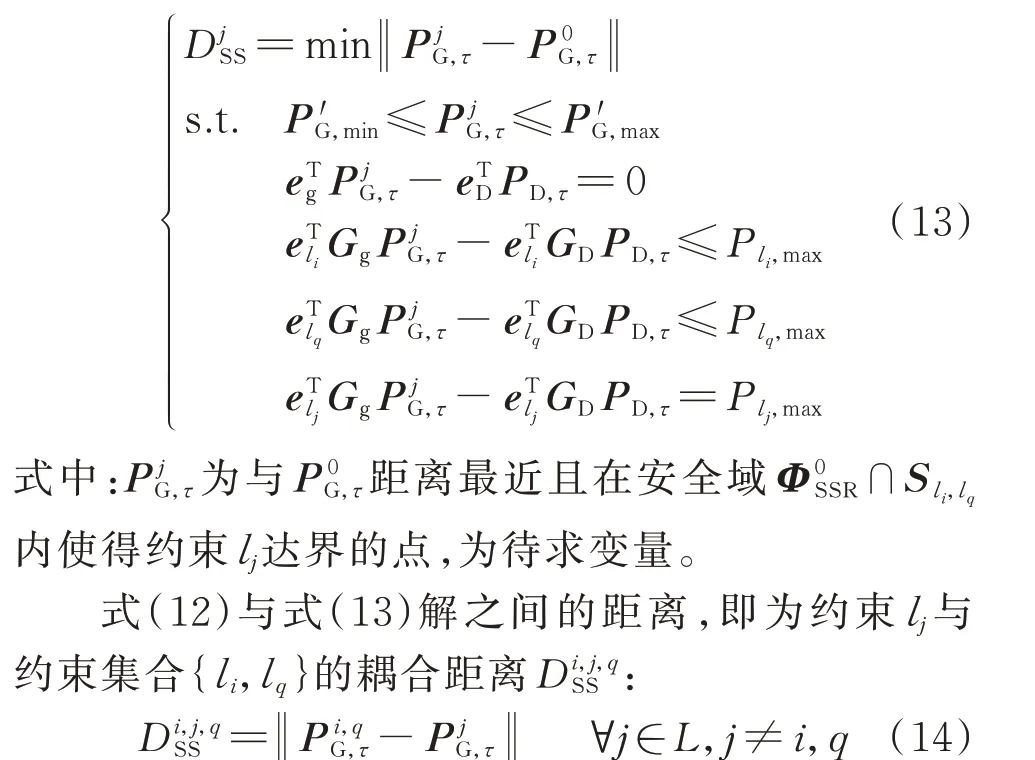
如果式(13)模型无解,或者式(13)的解校验后不满足其他安全约束的要求,说明在安全域范围内无法找到使得约束lj达界并且使得约束li和lq不越限的点,后续迭代中暂不返回约束lj。
3 考虑约束耦合辨识的发电计划求解方法
3.1 考虑约束耦合辨识的机组组合模型
设第k次发电计划求解时已形成的安全约束集合为Lk,通过约束耦合辨识得到第k+1 次迭代求解时的安全约束集合Lk+1为:
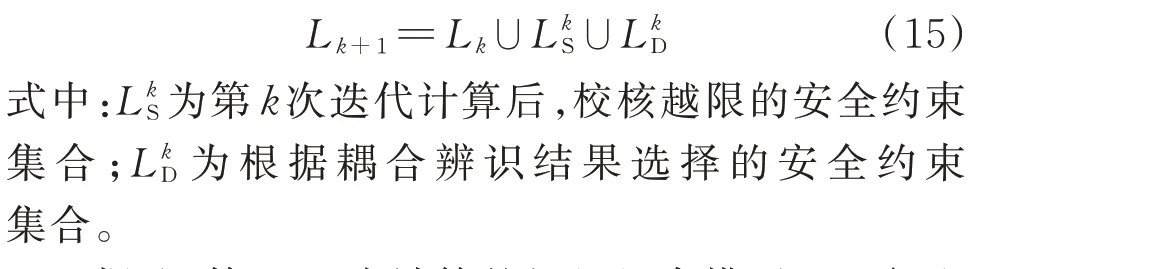
据此,第k+1 次计算的机组组合模型以运行和启停成本最小化为目标:

式 中:PG,n,t和γG,n,t分 别 为 机 组n在 时 段t的 出 力 和启动变量;CG,n和ωG,n分别为机组n的单位运行成本和启停成本;NG和NT分别为优化机组集合和优化时段的集合。
需满足时段的系统电力平衡约束为:
式中:Pmax,l为安全约束l的限值,l∈Lk+1;Gl,n和Gl,m分别为机组n所在节点和负荷m所在节点对安全约束l的有功灵敏度系数。
需满足的机组出力上、下限约束为:
机组运行、启动、停机状态变量的约束为:

3.2 安全约束耦合辨识的具体流程
考虑安全约束耦合辨识的日前发电计划求解,相当于在图1 的闭环迭代计算过程中,将虚线框的部分替换为对越限结果进行约束耦合辨识的环节。耦合辨识的具体流程如图4 所示。
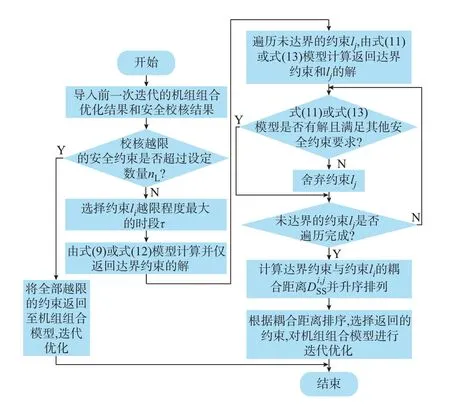
图4 安全约束耦合辨识的流程图Fig.4 Flow chart of coupling identification of security constraints
本文所提的约束耦合辨识方法,通过各次迭代的过程信息近似追踪机组状态的变化,降低机组组合变化的影响;然后,利用连续变量对约束进行耦合辨识建模,从而降低计算的难度。需要说明的是,考虑到SCUC 模型的非凸性,本文所述的约束辨识结果在下一次迭代优化中不完全准确。由于安全约束耦合距离计算是基于各次迭代的运行点和安全域而展开的,可以充分利用迭代的过程信息来降低计算的工作量,并且辨识结果可以作为发电计划求解过程中安全约束反馈的参考。
4 算例分析
构建IEEE 118 节点系统和IEEE 300 节点系统的日前机组组合模型(含96 个连续时段)。IEEE 118 节点系统的机组特性参数和报价、系统负荷数据参照文献[22],修正后的线路安全约束的限值如附录A 表A1 所示。IEEE 300 节点算例的机组特性参数和报价直接采用MATPOWER 软件包提供的 参 数[23],系 统 负 荷 如 附 录A 图A1 所 示。IEEE 118 节点系统中的5 台机组设定为非市场化机组,其余49 台机组参与发电计划优化;IEEE 300 节点系统中的全部机组均视作市场化机组参与发电计划优化。
基于安全约束“后验”添加的模式求解日前发电计划,并仅反馈越限约束的方法(记为方法A)与本文方法(记为方法B)的计算结果进行比对。在CPU 主频为1.8 GHz、内存为8 GB 的个人计算机上,借助CPLEX12.6 完成算例求解。
4.1 发电计划的计算过程与结果分析
4.1.1 基于安全约束耦合辨识的计算结果
不考虑安全约束求解IEEE 118 节点系统的日前发电计划,MIP 计算的间隙值设置为0.2%,校核各条线路安全约束后发现,线路8 越限,各时段SSD以及线路8 的有功潮流如附录A 图A2 所示。
选择SSD 越限程度最大的第76 时段进行耦合关系辨识,得到与线路8 正向潮流约束相耦合的安全约束辨识结果如表1 所示。
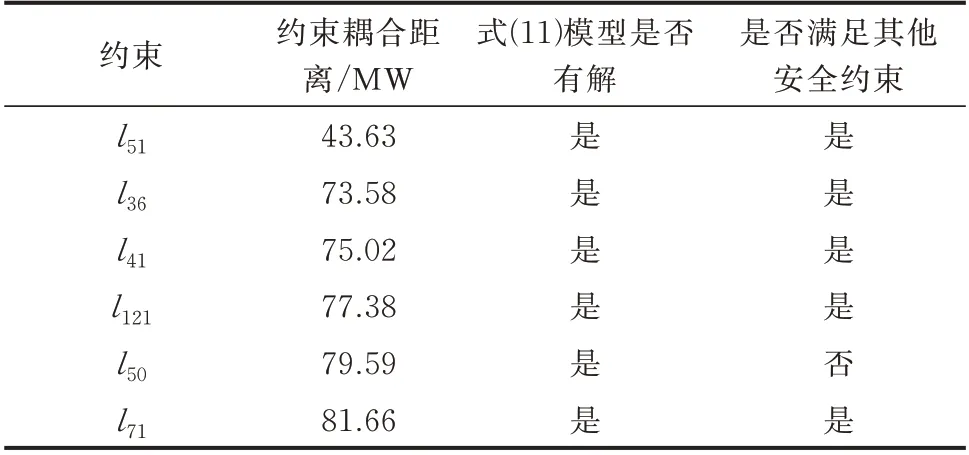
表1 与线路8 相关的安全约束辨识结果Table 1 Identification results of security constraints related with line 8
除了线路8 正向潮流约束以外,耦合辨识模型有解的线路安全约束数量为6 个,校验剔除不满足全部安全约束的解,得到第1 次迭代优化反馈的安全约束集合为{l51,l36,l41,l121,l71}。
将{l51,l36,l41,l121,l71}返回机组组合模型,进行第2 次迭代计算,消除了线路8 正向越限的同时,不再有其他安全约束越限。两次计算结果的潮流变化情况如表2 所示,在耦合辨识的5 条线路中,有2 条线路的最大传输有功功率增加,其中线路71 传输有功功率还出现了达界。
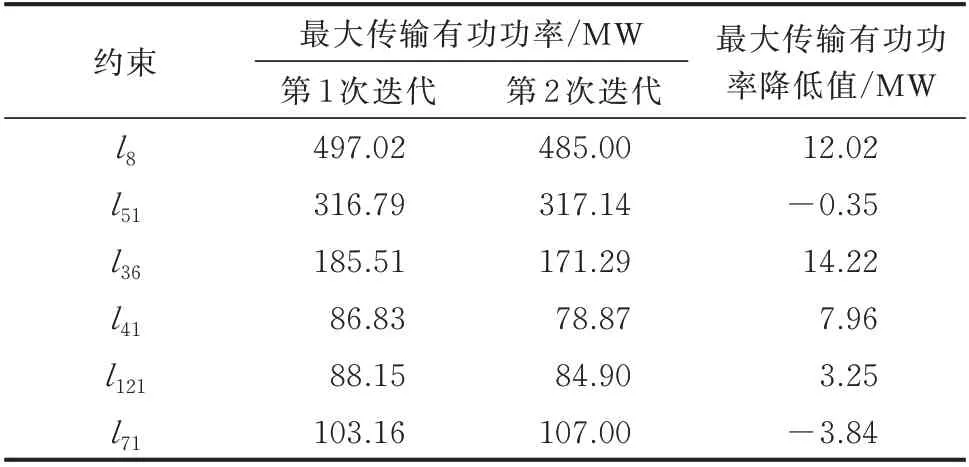
表2 机组组合优化结果Table 2 Optimization results of unit commitment
日前发电计划计算总耗时约35.75 s,其中无安全约束发电计划耗时约13.89 s,SSD 的求取以及约束耦合辨识约7.33 s。
4.1.2 仅返回越限约束的计算结果
仅对校核越限的线路8 安全约束返回发电计划模型进行求解。第2 次迭代计算后校核发现,尽管消除了线路8 越限,但是线路71 潮流正向越限,如图5 所示。

图5 IEEE 118 节点系统中线路71 的越限情况Fig.5 Security violation of line 71 in IEEE 118-bus system
此时,需要将线路8 和线路71 的安全约束同时返回,第3 次求解发电计划模型,最终消除了全部安全越限约束。3 次迭代的计算总耗时约53.34 s。
由上述结果可知,仅反馈各次求解出现越限的安全约束,可能导致较多次的迭代计算。以每次迭代求解的运行点作为基准,辨识当前越限约束与其他未越限安全约束的耦合关系,可以降低后续迭代计算的概率,还能为运行人员分析电网约束之间的制约关系提供参考。
4.2 耦合距离辨识结果的分析
在4.1 小节进行第1 次发电计划求解后,分别统计各条线路的剩余传输容量和负载率,将其与线路8 的耦合距离进行比对,具体如附录A 表A2 所示。针对安全约束耦合辨识有效的各条线路,提取其在负载率降序表、剩余传输容量升序表、安全约束耦合距离升序表中的序位,如附录A 图A3 所示。
由附录A 表A2 和图A3 可知,约束耦合距离与剩余传输容量、负载率等反映潜在越限信息的指标,既有区别又有联系。一般而言,约束耦合距离较小的线路,其在负载率、剩余传输容量的序位表中排列总体比较靠前,但是负载率和剩余传输容量序位靠前的线路,其在约束耦合辨识中的序位不一定靠前。
采用本文方法与参照负载率反馈约束的方法分别求解日前发电计划,比对结果如附录B 所示。按照线路负载率反馈约束的方法操作简便,但是重载标准的选取对于计算过程的影响较大,而且容易受到人为主观判断的影响。约束耦合距离的辨识利用了安全域的全局性信息,有助于降低约束反馈的冗余度,比仅依据各条安全约束自身的信息进行判断更为合理。
4.3 安全约束越限的耦合辨识分析
基于4.1 小节的算例思路,将IEEE 118 节点系统中的线路限额修正后,使得第1 次发电计划求解导致了线路3、线路8 和线路141 同时越限,如附录C图C1 所示。
根据第1 次迭代计算的计划运行点,选取SSD最大的时段76 进行安全约束耦合辨识,由式(12)至式(14)得到表3 的辨识结果。然后,将耦合辨识输出的安全约束全部添加至发电计划优化模型进行迭代计算,得到了满足全部安全约束的发电计划。本例中,多线路越限场景下的SSD 求解和耦合辨识耗时约8.78 s,2 次发电计划优化耗时约35.80 s,总计耗时约44.58 s。
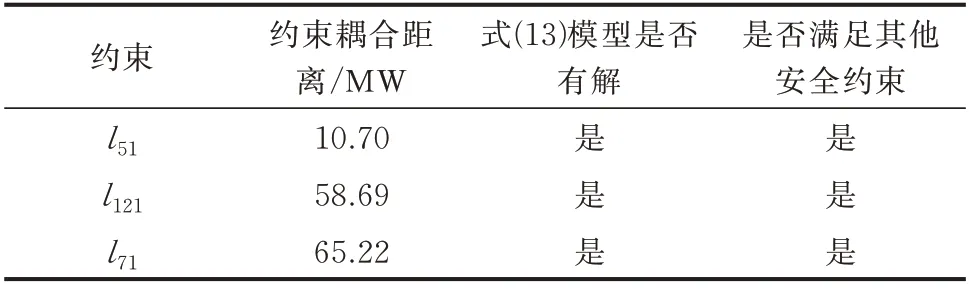
表3 多条线路越限的安全约束辨识结果Table 3 Identification results of security constraints with several violated lines
如果仅反馈第1 次无安全约束校核越限的3 条线路约束,则在迭代计算后线路71 的最大传输有功功率为110.96 MW,仍然超出限额107 MW 的要求,需要再一次反馈线路71 的约束,求解得到满足全部约束的发电计划。3 次迭代计算的总耗时约为50.46 s。因此,安全约束耦合关系的辨识方法仍可适用于多条线路安全约束越限的场景。
4.4 计算耗时与辨识有效性的讨论
4.4.1 计算耗时讨论
采用IEEE 300 节点系统对方法A 和B 进行对比。不考虑安全约束求得的发电计划初始解后,校核发现线路45 越限。与线路45 相关的耦合距离辨识结果如附录C 表C1 所示,将耦合距离最小的前5 条安全约束返回机组组合模型,通过第2 次迭代计算得到了满足要求的解,总计算耗时约为102.33 s。
若仅反馈当前迭代越限的安全约束,在第2 次机组组合优化后消除了线路45 越限情况,但是新出现了线路409 越限情况,如附录C 图C2 所示。因此,需要开展第3 次迭代计算,总计算耗时约为153.71 s。
本文将约束耦合辨识纳入日前发电计划求解的做法,是以增加安全距离求取时间为代价,来尽量避免后续不必要的机组组合迭代优化,并且为电网运行管理提供更为细致的信息。将IEEE 118 节点系统和IEEE 300 节点系统的计算耗时汇总,如表4 所示,其中安全约束的数目是包括了每一条线路中的正向和反向限额的约束。在安全约束存在“跷跷板”现象的场景下,约束耦合距离辨识对计算耗时的影响不一定劣于机组组合迭代求解的耗时。
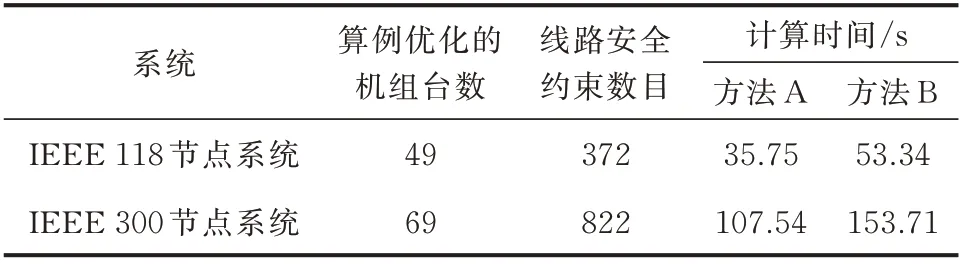
表4 计算时间对比结果Table 4 Comparison results of calculation time
4.4.2 约束辨识的有效性讨论
在日前发电计划求解时,消除电网安全约束的方式包括机组的启停和出力的调整,机组组合状态的变化确实会对所提方法的应用效果产生影响。本文所述的约束耦合辨识尽管是基于各次迭代的机组组合状态进行,但安全域的刻画、SSD 的求解仍然是对机组组合这一非凸模型可行解范围的近似表达。如果在前后2 次闭环计算过程中,边界条件使得机组组合状态发生了较大的改变,可能导致前一次迭代计算后的辨识结果并没有包含下一次迭代计算新出现的越限约束。例如,基于4.1 节的算例条件,如果将线路116 的约束限值由200 MW 改为165 MW,则在第1 次无安全约束的机组组合计算后进行约束辨识,辨识结果并未包含线路116(该线路约束与已越限线路约束的耦合距离模型无解),但是在第2 次的机组组合迭代计算时,该线路仍然出现了越限。此时,耦合关系辨识的作用仅在于揭示迭代过程中不同约束的潜在制约关系,为电网运行管理提供了更为详细的参考信息。在可行域空间中考虑机组启停变量的影响,需要借助新的理论来开展更为深入的研究[24]。
5 结语
1)在日前发电计划的求解过程中,根据各次迭代的过程信息来辨识当前越限约束与其他未越限约束的潜在耦合关系,有助于减少不必要的迭代计算。
2)安全约束耦合辨识利用了安全域的全局信息,相较于参考负载率、剩余传输容量等指标来进行判断的方法,能较为有效地减少反馈约束的冗余度,并为运行人员提供更全面的电网运行信息。
3)在存在“跷跷板断面”的运行场景下,通过约束耦合距离的建模和计算过程的简化处理,可以使计算时间不一定劣于仅反馈越限安全约束的计算方法,且耦合辨识方法有助于改进目前安全约束的反馈机制。
4)尽管耦合关系辨识利用了各次迭代计算的过程信息,但仍是对非凸优化可行空间的一种近似表述,准确性受到前后迭代过程中整型变量取值的影响。如何考虑整型变量对非凸优化问题的影响,进一步提高辨识的准确性,是值得继续研究的问题。
本文工作的出发点是基于发电计划迭代求解的框架来研究不同约束的耦合关系,所提的模型、方法有助于量化分析和评判不同约束之间的影响程度。在目前火电机组为主的电力系统中,尽管电网运行方式会受到市场主体报价的影响,但大量基荷机组的运行方式是比较明确的。因此,部分有功功率越限的情况可以通过约束条件的形式确定下来。在交易出清前开展安全约束耦合关系的辨识,也能够在一定程度上解决发电计划迭代计算和安全约束反馈的难题。在后续的研究和工程实践中,应根据不同试点市场运营的客观条件,进行不同技术路线的应用比对。
附录见本刊网络版(http://www.aeps-info.com/aeps/ch/index.aspx),扫英文摘要后二维码可以阅读网络全文。
