基于双层有向图的多微网优化协调运行控制
2022-11-14程奕凌张腾飞吴巨爱刘明祥蔡月明
程奕凌,张腾飞,吴巨爱,刘明祥,刘 建,蔡月明
(1. 南京邮电大学自动化学院、人工智能学院,江苏省南京市 210023;2. 南瑞集团有限公司(国网电力科学研究院有限公司),江苏省南京市 211106;3. 国网江苏省电力有限公司电力科学研究院,江苏省南京市 210013)
0 引言
碳中和[1-2]背景下的电力清洁低碳化将加快推动传统电力系统积极向以可再生能源为主体的新型电力系统发展[3-5]。微网(microgrid,MG)作为分布式电源(distributed generator,DG)与配电网之间的枢纽,是推动电力系统转型、实现可再生能源高效利用的重要方式[6-8]。同时,一定区域内多个临近的微网可互联形成多微网系统[9-12]。在互联模式下,各子微网既可以独立运行,也可以相互协调支撑,网间存在更复杂的功率、信息交互。所以在设计多微网的控制策略时,需要综合考虑各子微网的稳定以及相互间的协调运行。
近年来,有相关研究将集中式方法应用于多微网的运行控制中[10,13-14],文献[10,13]利用中央控制器为各子微网的下垂控制提供频率参考值。集中式控制过于依赖中央控制器,单点故障会降低系统的可靠性。与集中式控制相反,分散式控制不依赖中央控制器[15-16],文献[15]提出一种分散式下垂频率控制方法,可以在无需通信链路的情况下使子微网以不同的频率特性运行,但是会造成电压振荡。分散式控制虽然提高了单点故障时的可靠性,但DG间缺乏信息交互,难以协调运行,反而使这些可调资源对系统的支撑能力受到限制。
相比于集中式和分散式控制,分布式控制具备更高的可靠性、可扩展性和灵活性,仅利用稀疏通信即可实现各DG 单元的协调控制。分布式控制的这种优势更适用于多微网领域的协调控制问题。基于多代理(multi-agent)的一致性理论是实现分布式控制的基础理论之一,文献[17]提出基于一致性算法的孤岛微网频率、电压二次调节策略。在多微网的分布式控制研究中,文献[18]设计双层一致性算法,即子微网间基于一致性算法实现功率分配,DG 之间基于一致性算法实现调频调压;文献[19]使子微网间的换流器参与到分布式信息交互中,网内DG只需跟踪换流器即可恢复频率;文献[20]将多微网系统映射为网间和网内双层稀疏通信网络,并分别制定对应的控制策略,实现功率分配和调频调压;文献[21-22]提出分组一致性控制策略,该策略能够达到多目标一致状态,实现不同子微网内的功率分配。在现有的多微网分布式控制策略中,所有DG代理都会参与分布式调控,系统的功率分配完全由DG 代理之间通过一致性协作实现。因此,由一致性迭代特性可知,任一子微网正常范围内的负荷变化也会波及其他子微网的运行状态,这不仅会增加控制器的计算任务,还会导致子微网独立性不足。
为解决这个问题,本文设计基于双层有向图的多微网优化协调控制架构,并制定与之匹配的双层分布式控制策略:下层控制基于一致性算法修正下垂控制参数,对DG 输出电压、频率进行二次调节并实现网内DG 间功率按比例分配;上层控制根据各子微网的源荷平衡状态将多微网划分为独立运行和功率互济2 种运行模式,针对2 种运行模式分别制定控制策略。所提策略可实现在各子微网能够满足负荷需求时各自独立运行,当某些子微网产生功率缺额时由其他子微网提供灵活、合理的功率支撑,充分考虑了每个子微网的独立性。 最后,在MATLAB/Simulink 平台中搭建仿真模型验证所提策略的有效性及合理性。
1 多微网控制架构
多微网系统优化协调控制架构如图1 所示,由系统的物理结构以及各种代理之间的通信网络组成,子微网之间通过公共耦合点(point of common coupling,PCC)实现互联。实际运行中每个子微网均包含可控DG 和不可控DG,不可控DG 主要有光伏、风电等,因为其始终以最大功率输出,所以将其与网内负载看成一个等效负荷Loadk(图1 中以长方形表示);可控DG 主要有微型燃气轮机等(图1 中以绿色圆形表示,本文控制策略的控制对象为可控DG),可控DG 采取下垂控制,可以灵活地调节输出并实现“即插即用”。
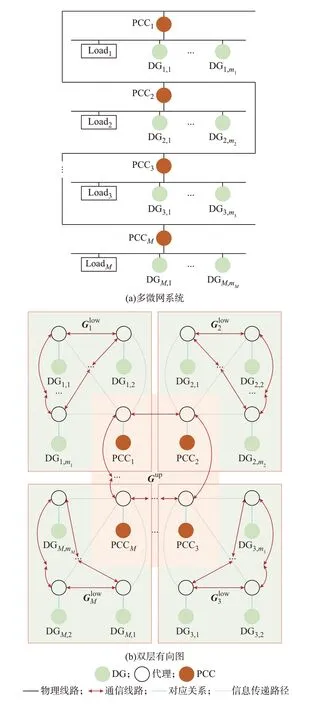
图1 多微网优化协调运行控制架构Fig.1 Optimal coordinated operation control architecture for multi-microgrid
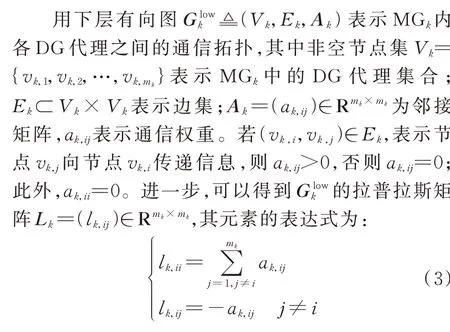
各代理之间的通信网络由上层有向图Gup和下层有向图Glowk表示。上层有向图中的代理与PCC对应,具体与每个子微网一一对应,称为PCC 代理;下层有向图的数量与子微网的数量相等,其中的代理与子微网中的DG 一一对应,称为DG 代理。
本文以孤岛多微网系统为研究对象,没有主网作为支撑,所以由各DG 通过下垂控制维持电压和频率稳定。DG 代理不直接参与多微网的优化协调控制,它们一方面采集对应DG 的运行状态信息,在子微网内进行信息交互,通过一致性协作调节下垂控制参数,另一方面通过响应PCC 代理完成子微网间的功率互济。
PCC 代理收集对应子微网内各DG 代理的状态信息,以此判断子微网的源荷平衡状态和剩余可用容量水平,并进行子微网间信息交互,参与完成多微网的优化协调控制,实现功率互济。在进行功率互济时,既要发挥子微网间能够提供功率支撑的优势,也要兼顾不同子微网的独立性。
2 基本原理介绍


2.1 下垂控制
DG 的一次控制采用下垂控制可以快速实现电压和频率的稳定,下垂控制的表达式为:

式 中:wk,i和Uk,i分 别 为DGk,i的 输 出 频 率 和 电 压,其
从式(1)和式(2)可以看出,下垂控制是有差调节,DG 任意输出时,其电压和频率相对于额定值都会产生跌落。因此,需要设计二次控制策略实现电压、频率的无差调节以及有功、无功功率的按比例分配。
2.2 图论
令xk,i表 示 节 点vk,i的 状 态 变 量,该 状 态 变 量 可以是DG 的频率、电压以及功率等物理量,当所有节点的状态量相同(xk,i=xk,j)时,系统达到一致 性收敛。在迭代收敛过程中,节点的状态方程可利用如下一致性算法表示:

式中:uk,i为节点vk,i的输入变量。
用上层有向图Gup≜(Vup,Eup,Aup)表示多微网系统中各PCC 代理之间的通信拓扑,其中非空节点集Vup={v1,v2,…,vM} 对 应 PCC 代 理 集 合;Eup⊂Vup×Vup表示边集;Aup=(aupks)∈RM×M为邻接矩阵。Lup=(lupks)∈RM×M为Gup的拉普拉斯矩阵。
3 分布式控制策略
3.1 基于Glowk 的下层控制
以MGk为例,基于Glowk设计的下层控制目标是将 网 内 每 一 个DGk,i的 输 出 频 率wk,i都 恢 复 至 额 定值,并实现网内DG 间精确的有功、无功功率按比例分配。但是由于各DG 线路阻抗不匹配,DG 在按比例进行无功分配时不能保证输出电压都恢复到额定值,所以电压控制目标折中为各DG 输出电压的平均值达到额定值。综上,控制目标为:
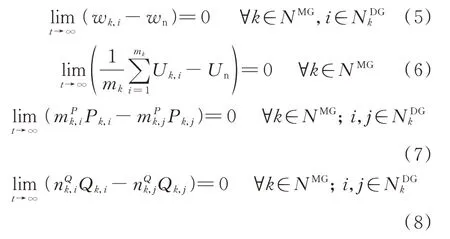
式中:wn和Un分别为频率、电压额定值。
3.1.1 有功功率/频率控制基于控制目标式(5)和式(7),对式(1)进行求导:
3.1.2 无功功率/电压控制
为了避免DG 线路阻抗对电压调节的影响,可以利用电压观测器获取DG 输出电压的平均值,使这个平均值恢复到额定电压。以DGk,i为例,基于一致性算法的电压观测器设计如下:观测值。

当功率波动时,各子微网内的DG 通过上述下层控制进行一致性协作,维持各个子微网的电压频率稳定。
3.2 基于Gup的上层控制
基于Gup的上层控制实现的是对整个多微网的优化协调控制。控制目标在于:1)各子微网内部能够应对负荷需求时各子微网保持独立运行,当某些子微网产生功率缺额时由其他子微网提供功率支撑,发挥多微网功率互济的优势;2)其他子微网能够根据自身剩余可用容量水平决定是否参与功率互济,并且参与功率互济的子微网之间按照各自剩余可用容量合理地分配缺额功率。
多微网的优化协调控制如图2 所示,具体将多微网划分为独立运行模式和功率互济模式,并针对2 种模式分别制定控制策略。后文仅对有功互济过程进行分析,无功互济与有功互济同理。
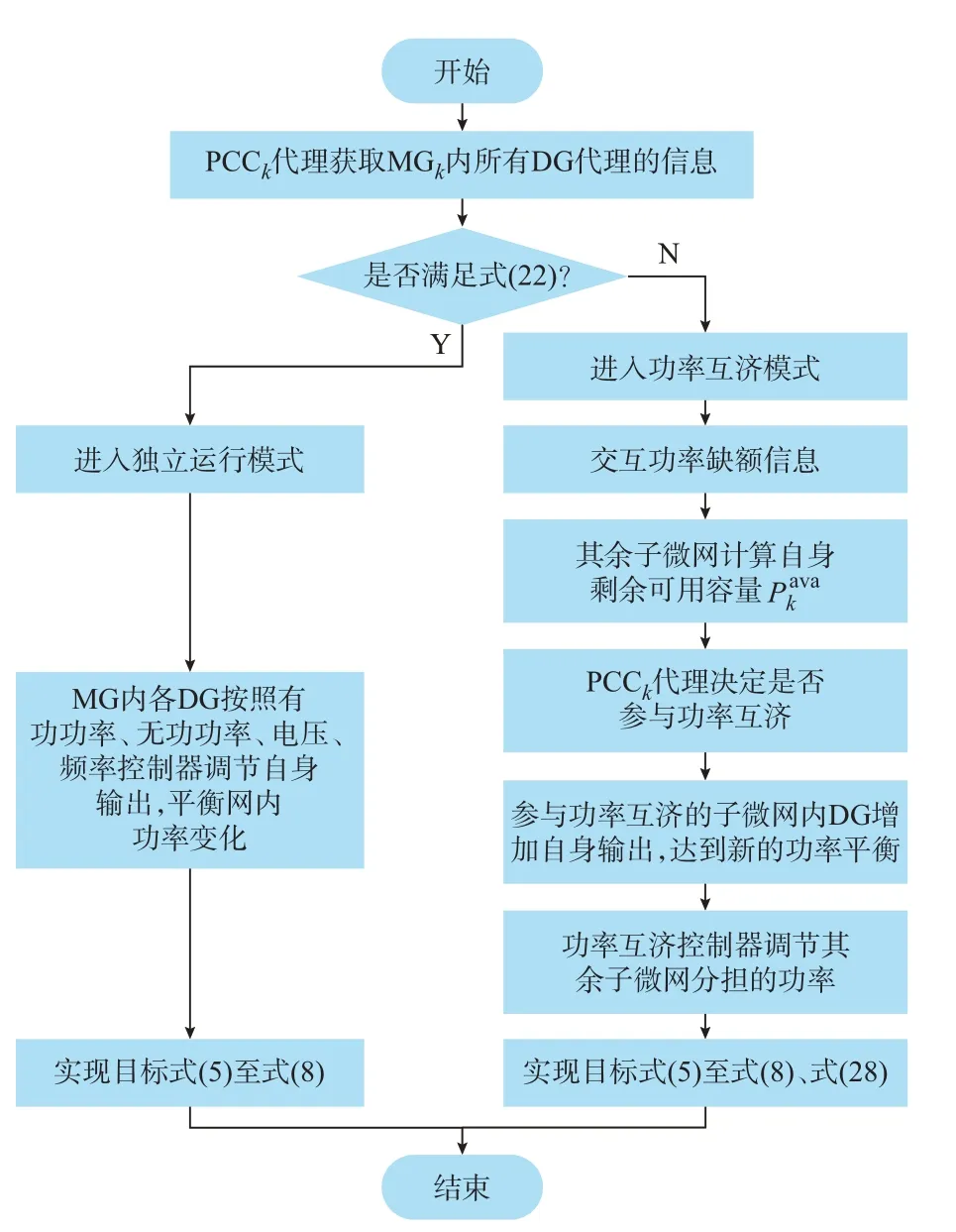
图2 多微网优化协调控制流程图Fig.2 Flow chart of optimal coordinated control for multi-microgrid
3.2.1 独立运行模式
如图1 所示,Gup中的各PCC 代理会接收来自Glowk中相应DG 代理的信息,以此判断各子微网的源荷平衡状态,多微网独立运行模式的判定条件为:


式(22)说明,当各子微网内的DG 能够满足负荷需求时,各子微网独立运行,由网内DG 调整输出来平衡负荷,各PCC 代理之间不进行信息交互。
在独立运行模式下,各子微网内DG 输出仍然按照3.1 节所述的下层控制进行调节。
3.2.2 功率互济模式多微网功率互济模式的判定条件为:

式(23)说明,存在某些子微网MGl内的DG 都按照最大容量输出依然无法满足负荷需求。此时PCCl代理与其他PCC 代理交互功率缺额信息,多微网系统进入功率互济模式。其他PCC 代理收到功率缺额信息之后根据自身情况决定是否参与功率互济。
PCCk代理收到上述信息后首先计算MGk的初始剩余可用容量,MGk的剩余可用容量定义为MGk内所有DG 的剩余可用容量之和,而DG 剩余可用容量定义为最大容量与当前输出的差值,即
为了保证MGk在进行功率互济时能够留有一定的功率裕度来应对自身的负荷变化,制定如式(25)所示的功率互济条件。当MGk的初始剩余有功容量满足该条件时,PCCk代理决定参与功率互济。
式中:cP为控制增益。
PCC 代理之间进行分布式信息交互,在式(29)的一致性迭代过程中不断更新PCC 处的功率。由式(27)可知,利用功率互济控制器控制PCC 处功率的本质是控制各DG 的输出。因此,对式(27)两边求导,并代入(29)可以得到:
因 此,在 控 制 各DG 输 出 时,设 计DGk,i的 缺 额功率分配修正项如式(32)所示,该修正信息由PCC代理发送至DG 代理,完成缺额功率在子微网间的优化分配。
由以上分析可知,当MGk(k∈NMG2)决定参与功率互济后,其内部DG 响应PCC 代理通过增加自身输出来平衡缺额功率;然后,由功率互济控制器调节各子微网分配的缺额功率,使MGk提供的功率支撑满足目标式(28);整个过程各子微网内DG 输出频率、电压的调节仍然由下层控制完成,即每个子微网内的DG 输出始终满足目标(式(5)至式(8))。
结合下层控制和上层控制,完整的多微网分布式控制框图如图3 所示,其中功率互济控制、无功功率/电压控制以及有功功率/频率控制详细框图如附录A 图A2 所示。图中:ik,i为逆变器输出电流;Uk,i,d和Uk,i,q、ik,i,d和ik,i,q、iL,d和iL,q分别为Uk,i、ik,i、iL的dq轴分量;Qavas为MGs(s∈NMG2)的剩余无功容量;Qs,PCC为MGs(s∈NMG2)提供的 无功功率;δQ k,i为 缺 额无功功率分配修正项。每个DG 视为一个电压源通过变流器接入微网,Rf、Lf、Cf分别为滤波电阻、电感和电容;Rc和Lc分别为输出端电阻和电抗。由一致性迭代获得下垂控制参考值,由下垂控制得到dq轴参 考 电 压U*k,i,d和U*k,i,d,经 过 电 压 环 控 制 得 到dq轴参考电流,最后与电流测量值iL比较,由电流环控制得到变流器的脉宽调制(PWM)信号。
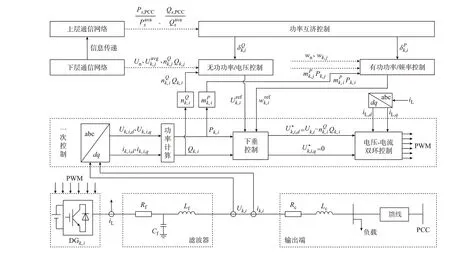
图3 多微网分布式控制框图Fig.3 Distributed control block diagram of multi-microgrid
3.3 稳定性证明
本文所设计控制器的控制目标在于:1)维持DG 输出频率、输出电压的平均值在额定值,并实现网内DG 之间的有功、无功功率按比例分配;2)参与功率互济的子微网之间根据自身剩余可用容量分配缺额功率。
根据式(39)可知wn-wk渐进稳定并且DG 的输出频率wk,i能够恢复至额定频率wn。同理,电压、有功功率、无功功率以及功率互济控制器都能实现控制目标。
4 仿真分析
为了验证本文所提控制策略的控制效果,在MATLAB/Simulink 平台中建立了包含4 个微网的多微网系统,系统结构如附录A 图A3 所示。代理之间的通信网络基于MATLAB/Simulink 平台中的一个模块S-Function 建模,代理之间的通信网络如附录A 图A4 所示。系统的额定频率和额定电压分别为314 rad/s 和380 V。各DG 的下垂系数、最大容量以及其他系统参数如附录A 表A1 所示。
4.1 算例1:多微网运行模式切换
本算例用以验证在本文所提控制策略下,多微网系统能够实现3.2 节中2 种运行模式的灵活切换。仿真设置MG1至MG4的初始负荷如附录A 表A1 所示,假设2 s 时MG2内的负荷增加至(71 kW,45.5 kvar),6 s 时恢复至(40 kW,21 kvar),8 s 时仿真结束。仿真结果如图4 所示。
图4(a)至(d)表明,在输出功率变化时,经过本文所设计的下层控制策略调节后,所有DG 的输出频率、输出电压的平均值在短时间内能够恢复至额定值。整个过程MG1至MG4内DG 输出有功功率之比分别满足2∶1、3∶2、3∶1、6∶3∶2,输出无功功率之比分别满足3∶1、4∶3、4∶1、12∶4∶3。
图4(c)至(e)表明,在t∈[0,2)s期间,MG1至MG4有能力应对网内负荷需求,各自保持独立运行,相互之间没有功率支撑,所以各PCC 处的功率均为0。
在t∈[2,6)s 期 间,MG2内 的 负 荷 增 加 至(71 kW,45.5 kvar),此时MG2内DG 都以最大容量输出,缺额功率大小为(21 kW,17.5 kvar),多微网进入功率互济模式。2 s 时MG1、MG3、MG4的剩余可用容量约为(60 kW,40 kvar)、(20 kW,15 kvar)和(66 kW,47.5 kvar)。
根据功率互济条件可知,由MG1和MG4提供功率支撑。功率互济模式下多微网系统达到新的稳态时流过PCC 的功率如图4(e)所示,MG1和MG4提供的 功 率 支 撑 约 为(10 kW,8 kvar)和(11 kW,9.5 kvar),该功率支撑之比与剩余可用容量之比相近。
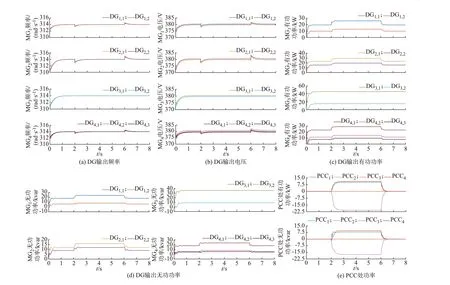
图4 算例1 仿真结果Fig.4 Simulation results of case 1
6 s 后MG2内的负荷恢复至2 s 前的水平,多微网系统再次恢复到2 s 前的独立运行状态。
4.2 算例2:MG 即插即用能力
本算例用以验证所提控制策略的MG 即插即用性能。仿真设置MG1、MG2、MG4初始负荷如附录A表A1 所示,MG3的初始负荷为(32 kW,20 kvar),2 s时MG2的 负 荷 增 加 至(71 kW,45.5 kvar),4 s 时MG3退出运行,6 s 时MG3重新接入,仿真结果如附录B 图B1 所 示。
从附录B 图B1 可以看出,多微网系统在2 s 之后已经进入功率互济模式,并且MG3也参与功率互济。当t=4 s 时,MG3从系统中退出运行,此时MG3作为一个自治系统独立运行,只需满足自身的负荷需求即可,所以在t∈[4,6)s 期间MG3内各DG 输出恢复到2 s 之前的状态。由于MG3内下层控制的作用,其退出多微网运行之后仍然能保持稳定。
t∈[4,6)s 期间,对于包含MG1、MG2、MG4的剩余系统,MG1、MG4内的DG 需要输出更多的功率来补偿由MG3退出运行带来的影响。在所提控制策略作用下,MG1、MG4重新分配缺额功率。
t=6 s 时MG3重新接入系统,经过短暂的协调控制,MG1、MG3、MG4再次实现了缺额功率的合理分配,该功率分配状态与MG3退出运行前相同。因此所提控制策略具备良好的MG 即插即用性能。
4.3 算例3:通信线路故障
本算例用以验证通信线路故障情况下所提控制策略的可靠性。仿真前4 s 设置与算例2 相同,4 s 时设置DG4,1和DG4,3代理之间的通信线路断开,6 s 时PCC1和PCC3代理之间的通信线路断开(如附录A图A5 所示)。仿真结果如附录B 图B2 所示。
仿真结果表明,4 s 和6 s 时发生通信故障,由于Glowk和Gup仍保持连通性,所以系统在产生小幅振荡后能恢复稳定,并且各子微网内的DG 仍然按比例分配负荷,MG1、MG3、MG4仍然按剩余可用容量分担缺额功率。但4 s 和6 s 时Glowk和Gup的通信权重发生了变化,即a4,13=0、a4,31=0、aup13=0 和aup31=0,导致收敛速度略微变慢。
4.4 算例4:对比分析
将本文所提控制策略与文献[20]中的多微网分布式控制策略进行比较,文献[20]包含网间和网内双层控制:网间控制调整多微网的功率分配;网内控制对DG 输出电压和频率进行调节。与本文不同的是,文献[20]中不存在PCC 代理,直接由DG代理参与子微网间的一致性协作完成功率分配。文献[20]所采用的通信网络如附录A 图A6 所示,仿真设置与算例1 相同,文献[20]所提控制策略的仿真结果如图5 所示。
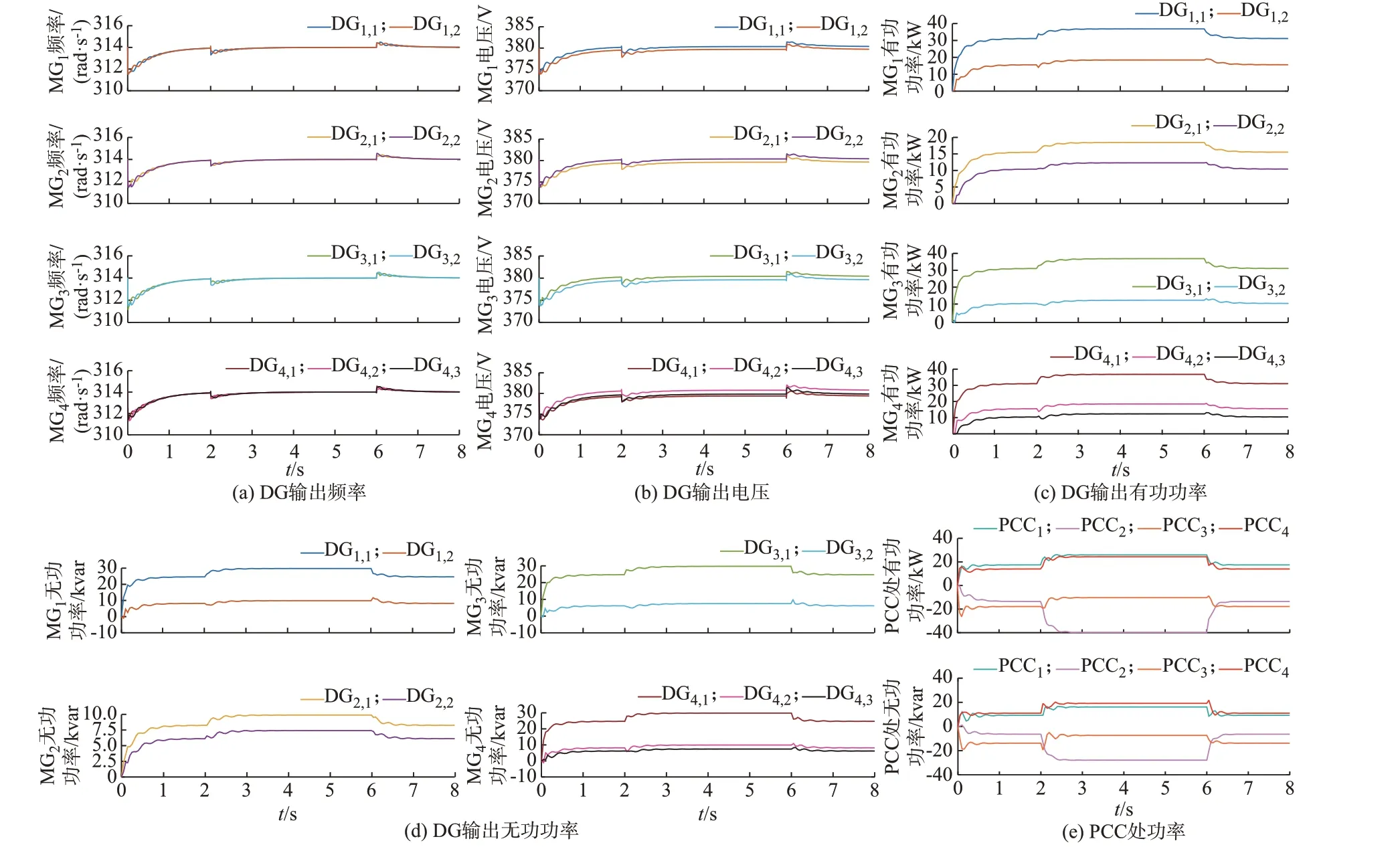
图5 算例4 仿真结果Fig.5 Simulation results of case 4
通过对比图4 和图5 可以看出,当MG1至MG4都能满足负荷需求时,在文献[20]所提策略下4 个子微网之间已经存在功率交互,并且MG2的负荷变化 时,MG1、MG3、MG4内 的DG 都 会 在 一 致 性 算 法的作用下更新自身的运行状态,这导致子微网的独立性得不到保障。但是在本文所提策略下,MG1至MG4都能满足负荷需求时各自独立运行,MG2产生功率缺额后,MG1、MG3、MG4能够自主决定是否参与功率互济。此外,文献[20]所提策略经过1.76 s左右达到各DG 运行状态的收敛,而本文所提策略经过1.02 s 左右达到收敛。因此,本文所提策略不仅能保证各子微网的独立性,还能减少控制器的计算任务,加快收敛过程。
5 结语
针对现有多微网分布式控制存在的子微网独立性不足的问题,本文设计一种基于双层有向图的多微网优化协调运行控制策略。主要贡献如下:
1)本文设计一种基于双层有向图的多微网控制架构。在该架构中,DG 代理不直接参与多微网的优化协调控制,它们一方面进行子微网内的信息交互,另一方面通过响应PCC 代理完成子微网间的功率互济,PCC 代理会参与到多微网的优化协调控制中,当某些子微网产生功率缺额时PCC 代理之间进行子微网间信息交互,并由PCC 代理自主决定是否参与多微网的功率互济。该架构不仅减少了控制器的计算任务,各子微网的独立性也得到了保障;
2)制定了与控制架构相匹配的双层分布式控制策略:下层控制基于一致性算法对DG 输出电压、频率进行二次调节并实现子微网内DG 间功率分配;上层控制根据各子微网的源荷平衡状态将多微网划分为独立运行和功率互济2 种运行模式,并针对两种运行模式分别制定控制策略。通过代理间的分布式协作,摆脱对中央控制器的需求,具备良好的“即插即用”性能;
3)为了使子微网在进行功率互济时能够留有一定的功率裕度来应对自身的负荷变化,制定了功率互济条件,PCC 代理根据该条件自主决定是否参与功率互济。此外,参与功率互济的子微网之间基于一致性算法按照自身剩余可用容量分配缺额功率,实现子微网间灵活、合理的功率互济。
本文研究的多微网系统假定均为同类型微网,然而多微网互联将广泛应用于工业区、商业区以及居民区等,未来电动汽车作为主要交通工具其无序充放电行为也会增大电网压力。后续将进一步研究不同类型微网的用电特征以及电动汽车等新型负载投入对多微网协调控制效果的影响。
附录见本刊网络版(http://www.aeps-info.com/aeps/ch/index.aspx),扫英文摘要后二维码可以阅读网络全文。
