便携式高精度立木胸径测量装置研制与试验
2022-11-13孙林豪冯仲科苏珏颖邵亚奎路丹桂马天天
孙林豪,冯仲科,2,苏珏颖,邵亚奎,路丹桂,马天天
便携式高精度立木胸径测量装置研制与试验
孙林豪1,冯仲科1,2※,苏珏颖1,邵亚奎1,路丹桂1,马天天1
(1. 北京林业大学精准林业北京市重点实验室,北京 100083; 2. 海南大学热带特色林木花卉与种质创新教育部重点实验室,海口 570228)
立木胸径是森林资源调查中最重要的测量指标。为了实现高效、精准、简便地测量立木胸径,适应复杂树形和不同径级的树木,节省内外业勘测成本,该研究研制了一款立木胸径测量装置。基于隧道磁阻旋转编码器构建适合低成本、轻小型机电结构和高分辨力处理算法的方法,同时开发了由嵌入式软件、Android端应用和Web端应用构成的系统软件,通过多功能按键组合设计了特殊树形和大径级树木的作业流程。在单木勘查作业过程中,装置的机电结构会将立木胸径由机械量先转换为磁信号再转换成电信号,之后由嵌入式软件中集成的处理算法把电信号换算成胸径测量数据。完成所有单木勘查作业后,装置内的蓝牙将数据传输至Android端应用进行存储再上传到Web端的数据库中。为验证装置的测量精度和作业效率,选取包含多个树种的196株立木和一块包含42株立木的小样地进行试验。试验结果表明:该装置对不同径级的立木都具有较高的测量精准度(总平均绝对误差为0.08 cm、平均绝对百分比误差为0.37%、均方根误差为0.12 cm和相对均方根误差为0.54%);人均每株立木测量耗时为9.3 s(约为传统围尺方法的1/3),作业效率高。该装置解决了传统围尺在数据量测、记录和入库上的短板,降低了人力成本,比非接触式、卡测类、电子拉绳类仪器的制造成本低几百到上万元,造价仅为260元,且携带方便(质量仅为230 g),符合国家森林资源连续清查技术规定的精度要求,在森林资源调查中具有宽广的应用前景。
林业;测量;设计;胸径;隧道磁阻;编码器;森林资源调查
0 引 言
立木胸径(Diameter at Breast Height, DBH),为距地面1.3 m胸高处的树木直径[1-2]。当前,国内森林资源调查主要使用传统的测径围尺来测量胸径,采集数据时二人一组,一人用围尺沿胸高断截面一圈后读尺面上的刻度[3-4],一人手工计数,测量结束后将数据人工入库,整个过程费时费力,且易出错[5-8],围尺因尺面较宽会引起一定的测量误差[9-11]。由于胸径相较于树高、冠幅、枝下高、树龄等因子更易测量[1-2],是森林立地质量的评价指标,更是构建林分蓄积、森林碳汇等模型的重要因子[1-3],因此高效、精准地测量立木胸径对确定森林资源状况和制定森林经营管理策略有着重大意义。
目前胸径测量主要分为非接触式和接触式[11-13]。非接触式是指在未触碰到树木躯干的情况下来量测立木胸径[11-13],主要的技术和方法有遥感影像[14-16]或无人机影像[17-19]反演法、激光扫描法[20-24]、基于相机[25-28]或手机[29-30]的摄影测量法[31-33]等,虽然上述方法能在一定程度上快速、大规模地估测胸径,但是存在精度不稳定、价格高昂、操作复杂、受环境因素干扰大、成本高、不便携等缺点,难以在森林茂密、地势复杂的环境下使用。接触式测量所使用的测径仪器可分为围测类和卡测类[10]。卡测类测径仪通常是在传统卡尺的基础上进行电子化和数字化改造[34],尺寸较大,对于测量呈簇状分布的树木或在茂密的树林使用存在诸多不便[10-12,34],对于树干横截面不规则的立木需多次测量取均值,耗时费力,若进行多期森林样地调查,因卡测方向的不同,会导致不同期数据所计算的树木生长量存在较大误差。现阶段国内学者设计的围测类测径仪都是基于线性电子拉绳传感器[4,35-36]进行研制的,该型传感器虽然分辨力和精准度较高,但存在着绳径过细、易折断、体积过大不易携带、电路设计复杂、信号处理成本高等问题。上述的装置或方法对大径阶树木、树形呈分叉、瘤状、簇状分布和胸径处出现树包、节疤、凹凸等特殊且常见的情况并不适用;在配套软件上,缺乏一体化的数据管理平台或需要复杂的后处理软件[20-23],人工成本高,所以难以在森林资源调查中大规模推广使用。
为满足森林资源调查工作的实际需求,本研究融合传感器技术、机电一体化、软件工程、测树学、森林经理学等学科知识,吸收测径围尺的优点,克服电子拉绳传感器的缺点,并考虑到特殊树形和大径级的树木测量的要求,研制一款新型立木胸径测量装置。为实现该装置在立木胸径测量上的电子化、数字化、便携化、内外业一体化,基于隧道磁阻旋转编码器提出一种结合低成本、轻小型机电结构和高分辨力算法,同时开发了由嵌入式软件、Android端应用和Web端应用所构成的系统软件;以期为提高胸径测量精度、提升作业效率、增强实用性、降低制造成本和推广应用上提供参考。
1 装置结构与工作原理
1.1 总体结构
所研制的便携式高精度立木胸径测量装置的机械结构如图1所示,尺寸:长8.35 cm×宽5.80 cm×高5.55 cm,质量:230 g,可持续工作至少20 h,主要零部件都装配在外壳和底板上;外壳上装配有触控屏(屏幕尺寸:长5.76 cm×宽4.32 cm,分辨率:320像素×240像素)、按键、开关等部件及尺带、触控屏、手柄、充电指示灯、Type-c充电头等的开孔;底板上装配有隧道磁阻旋转编码器、印刷电路板、法兰、尺带、转盘、发条、挡板、电池等部件,其中尺带的末端与转盘相连。
1.2 电路设计
本文立木胸径测量装置的电路结构框图如图2a所示,主控模块采用低成本、抗干扰、低功耗的STC15W4K48型单片机;编码器为PD-1503-SDI型(脉冲位数12位,外径15 mm,长度18.5 mm,轴3 mm,出轴长度10 mm),用于测量转盘的旋转变量;触控屏和按键用于人机交互;存储模块使用SD卡(容量2 GB),用于测量数据的存储;通信模块为JDY-31型蓝牙(工作电压3.3 V,传输距离30 m,数据吞吐量16 kB/s),用于和上位机通信,可将实时测量数据或SD卡中存储数据进行上传;电源模块由锂电池(电量4 000 mAh,输入电压3.7 V,输出电压5 V)、充电芯片、电源芯片和开关组成,有充放电、短路保护、升降压等功能。依据电路结构框图所设计的印制电路板如图2b所示,集成了主控、存储、通信等模块,并提供了编码器、触控屏、电池等接口。

1.触控屏开孔 2.尺带开孔 3.外壳 4.触控屏 5.隧道磁阻旋转编码器 6.印刷电路板 7.法兰 8.尺带 9.转盘 10.发条 11.底板 12.开关 13.充电指示灯开孔 14.Type-c充电接口开孔 15.按键 16.手柄开孔 17.电池 18.挡板
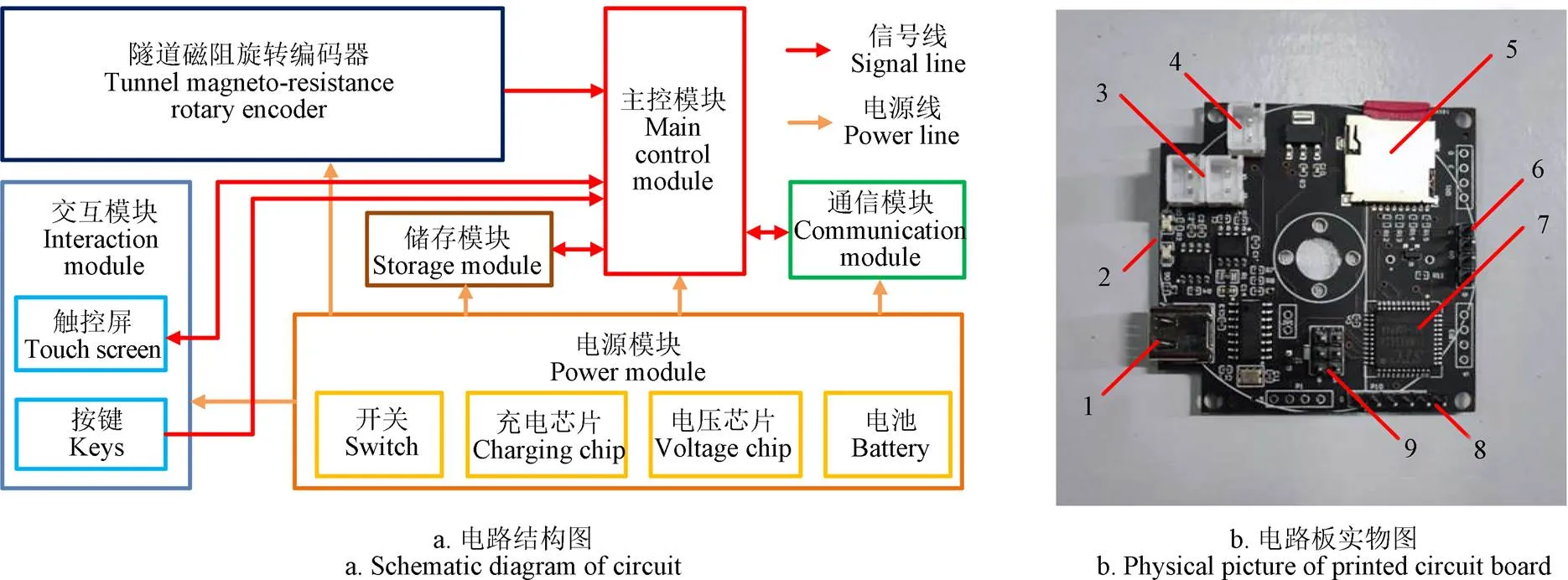
1.Type-c充电口 2.充电指示灯 3.电池接口 4.开关接口 5.SD卡槽 6.触控屏接口 7.单片机 8.按键接口 9.编码器接口
1.3 工作原理
1.3.1 总体工作原理
装置的总体工作原理是将立木胸径测量工作电子化和数字化,具体如下:
1)电子化:通过机电结构将胸径测量时尺带所拉出的直线位移变量转换为转盘、法兰、编码器中心轴的旋转变量;再通过编码器内部的隧道磁阻(Tunnel Magneto-Resistance,TMR)元件感应由此产生的磁场变化来产生电信号。
2)数字化:通过单片机中集成的处理算法将编码器输出的电信号换算成胸径测量数据,然后传输到系统软件中进行数据管理。
1.3.2 隧道磁阻检测角度原理
TMR元件是基于隧道磁阻效应所制造的磁性多层膜材料,隧道磁阻效应作为第四代磁传感技术,具有灵敏度高、磁场分辨率高,响应时间快,温度漂移特性好、功耗低、体积小等优点[37];内有在2层强磁性体(自由层和钉扎层)中嵌入1~2 nm厚薄绝缘体的阻隔结构,自由层磁化方向根据外部磁场方向而变化,但钉扎层磁化方向被固定,不因外部磁场方向的变化而发生改变;当钉扎层与自由层的磁化方向平行时,阻隔层可流过大电流,TMR元件的电阻值最小;当磁化方向为反向时,则反之[38]。利用TMR元件来检测角度的原理如3图所示:当固定的TMR元件上方有一磁铁在延一中心轴旋转时,其自由层的磁化方向追随磁铁的磁场方向而变化,因此TMR元件的电阻值也随之变化;通过TMR元件的电阻值与钉扎层和自由层之间磁化方向的相对角度成正比的关系来实现角度检测[37-38]。

图3 隧道磁阻元件检测角度原理图
1.3.3 编码器结构与原理
编码器的整体结构如图4所示,出线接电源线、地线,并输出数字信号;磁屏蔽外壳主要起到保护内部结构及屏蔽外部磁场的作用;在内部,通过编码器的芯片来检测转轴带动磁铁旋转所产生的磁场变化[38],编码器芯片中集成有8个TMR元件组成的2组惠斯特桥,其中1的钉扎层磁化方向一致、2的钉扎层磁化方向一致且与1相反、5和8的钉扎层磁化方向一致且与1和4正交、6和7的钉扎层磁化方向一致且与5相反。

注:VCC为电源;GND为地;A+为左惠斯特电桥正极;A-为左惠斯特电桥负极;B+为右惠斯特电桥正极;B-为右惠斯特电桥负极;R1、R2、R3、R4、R5、R6、R7、R8分别为惠斯特电桥中的TMR元件电阻,Ω。
左惠斯通电桥的差分输出电压值A为

式中A+为左惠斯通电桥的正极电压,V;A-为左惠斯通电桥的负极电压,V;Vcc为电源电压,V。
右惠斯通电桥的差分输出电压值B为

式中B+为右惠斯通电桥的正极电压,V;B-为右惠斯通电桥的负极电压,V。
由于2组惠斯通电桥内每个半桥内的2个TMR元件的钉扎层磁场方向相反,不同组所对应的2个TMR元件的钉扎层磁场方向正交,因此其输出信号曲线为2路正交的余弦波A、B,当转轴逆时针旋转时,A路余弦波超前B路余弦波相位角90°,当转轴顺时针旋转时,则A路余弦波滞后B路余弦波相位角90°。最后,通过滤波器、模数转换器、微处理器的处理将2路余弦波转换为数字信号[38]。
1.3.4 胸径换算原理
胸径换算是通过将拉出尺带的长度先换算成转盘的旋转圈数和单圈的旋转角度,再通过编码器进行量测而完成的,其原理如图5所示。
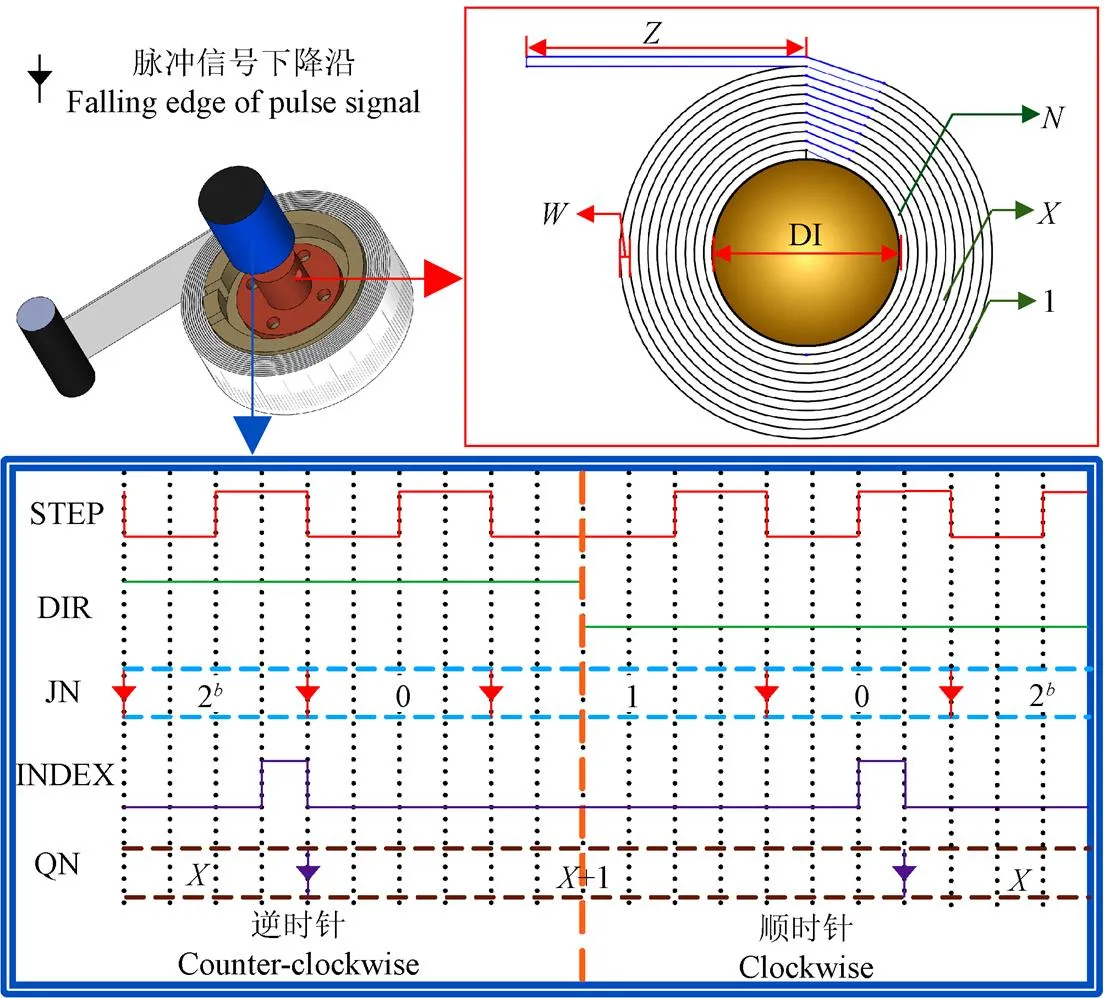
注:Z为尺带外露部分长度,cm;W为尺带宽度,cm;DI为转盘直径,cm;N为最大旋转圈数;b为编码器位数;X为当前旋转圈数;STEP为步进脉冲信号;DIR为方向电平信号;JN为单圈步进值;INDEX为0位脉冲信号;QN为旋转圈数累计值。
图5中的单实线框为转盘和尺带的平面投影,第圈尺带的内圈周长运算函数()为:

图5中的双实线框为的编码器工作时所输出脉冲信号的时序,每单向完整旋转1圈后产生2个步进脉冲信号STEP和1个0位脉冲信号INDEX;当转盘带动编码器沿顺时针旋转时,方向电平信号DIR为低电平,沿逆时针旋转时方向电平信号DIR为高电平。利用单片机对编码器输出的STEP、DIR、INDEX进行信号处理后得到的数值结合式(3)计算出的尺带测量长度为:

单片机每捕捉到1个STEP的下降沿且DIR为低电平则JN值加1,若DIR为高电平则JN值减1,数值为0~2的整数;同理QN通过捕捉INDEX和DIR信号进行增减,数值为0~的整数。
最后将式(4)求得的长度换算成胸径:
1.3.5 系统误差分析
一定的尺带宽度会引起系统误差[10],即尺带所围绕曲面的周长会大于所测水平横截面的实际周长r,如图6所示。
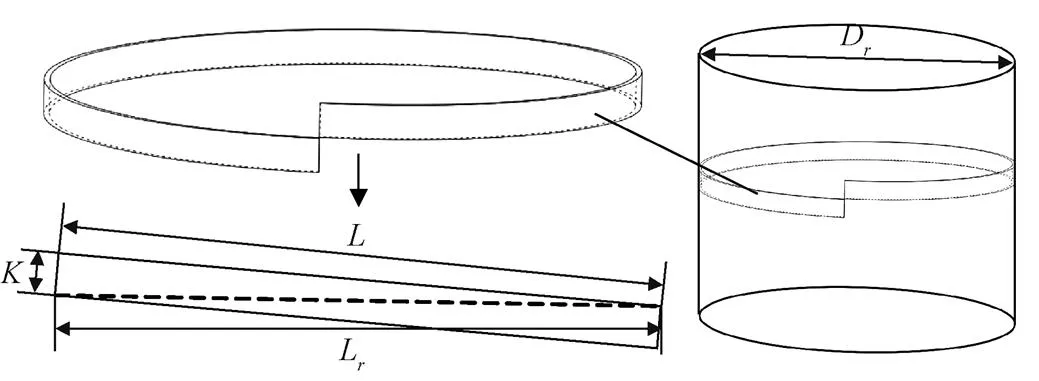
注:K为尺带宽度,cm;L为尺带测量长度,cm;Lr为实际周长,cm;Dr为实际直径,cm.
尺带宽度所引起的系统绝对误差AE、系统相对误差RE如式(6)、式(7)所示。

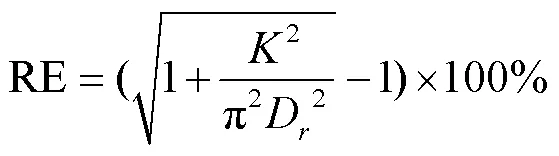
以和作为自变量,以AE和RE作为因变量绘制的系统误差变化曲面,如图7所示。

注:AE为绝对误差,cm;Re为相对误差。
由式(6)、式(7)和图7可知,当一定时,AE和RE与呈正相关;当一定时,AE和RE与呈负相关;若实际使用中选用尺面宽度太小的钢尺,则会像拉绳传感器的钢丝绳一样容易折断且在拉伸过程中会割伤手指[4,35-36];因此,本文选用尺面宽度适当(=1.4 cm)的低成本布尺,其绝对误差AE<0.02 cm(>5 cm)、相对误差RE<0.025%(≥20 cm),符合国家森林资源连续清查技术规定[41](树木胸径大于5 cm起测,对于胸径小于20 cm的树木,测量误差要小于0.3 cm;胸径大于或等于20 cm的树木,测量误差要小于1.5%)。
1.3.6 分辨力分析
虽然量具的高分辨力并不意味着高精度,但是高分辨力是高精度的保证[37-39]。根据图5和公式(3)可以推得第圈的尺带可被测量的最小变化即分辨力Res为

以和作为自变量,以Res作为因变量,所绘制的分辨力变化曲面如图8所示。由式(8)和图8可知,在=1时,Res的最大值最低;当一定时,越大,Res的值越小即分辨力越高,但越大也意味着编码器成本越高,因此本文选择最常见的12位编码器,其任意圈的Res0.0034 cm,在显示屏上的可视分辨力取为0.01 cm。
2 系统软件
系统软件由嵌入式软件、Android端应用和Web端应用构成。嵌入式软件主要用于集成高分辨力的处理算法和实现不同测树情景的人机交互功能。Android端应用和Web端应用主要用于数据管理,包含了数据通信、数据的提取与显示、数据的存储与上传、数据的查询与展示等功能。
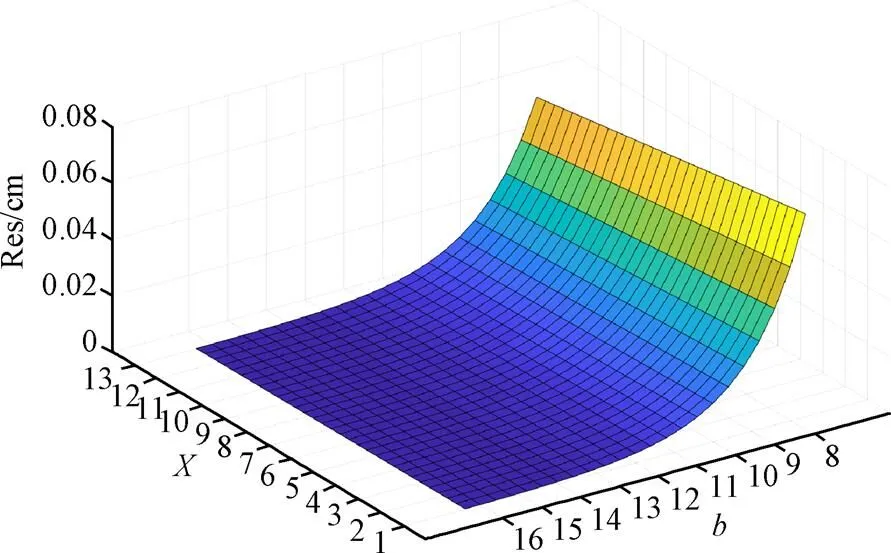
注:Res为分辨力,cm。b为编码器位数。
2.1 嵌入式软件流程
嵌入式软件的程序基于Keil_C51平台使用C语言进行开发,其流程如图9所示,主程序流程中主要包括胸径计算、仪器配置、按键功能检测与运算、存储数据、刷新数值显示等功能;外部中断INT0子流程通过STEP信号下降沿触发,最后返回JN值;外部中断INT1子流程通过INDEX信号下降沿触发,最后返回JN值和QN值;胸径计算子流程根据输入QN值和JN值返回长度和胸径。

图9 嵌入式软件流程图
2.2 单木勘查作业情景
在实际测树过程中,除了树形正常且中小胸径的树木以外,还会遇到其他树形或大胸径的树木,其他方法或仪器大多都无有效或省力的手段或根本无法测量[40],本文装置嵌入式软件针对不同的测树情景设计了多功能按键组合进行操作,其中单木勘查作业情景如图10所示,具体分类如下:
1)情景1:正常树形的树木,测树时将尺带绕树干1圈后按绿键1次,程序会自动存储树木编码的胸径值Dz。
2)情景2:分叉部位在地面1.3 m以上的树木,测树时操作同上。
3)情景3:分叉部位在地面1.3 m以下或呈簇状分布的树木,测树时按多株树处理,每绕1次树干按绿键1次,程序分别存下树木编码+1+2…的胸径值Dz、Dz+1、Dz+2…。
4)情景4:瘤状树形或胸径处出现树包、节疤、凹凸等的树木,需要在不同的树干横截面测量多次,测树时先绕1次树干某1横截面后按绿键1次,再每绕1次树干其它横截面后按黄键1次,共计次,程序自动计算均值并存储树木编码的胸径值Dz=(Dz0+Dz1+…+Dz)/(1)。
5)情景5:大胸径的树木,当只测1处树干横截面时,先沿着该横截面的部分边缘按绿色键1次,再每绕剩余边缘1次后按红键1次直至测完,共计次,进行累加并存下树木编码的胸径值Dz=Dz0+Dz1+…+Dz;当需测多处横截面的胸径时,程序按照先分别计算并存储不同横截面的累加值,再将多个累加值按情景4求均值,最后存储该树木编码的胸径值。
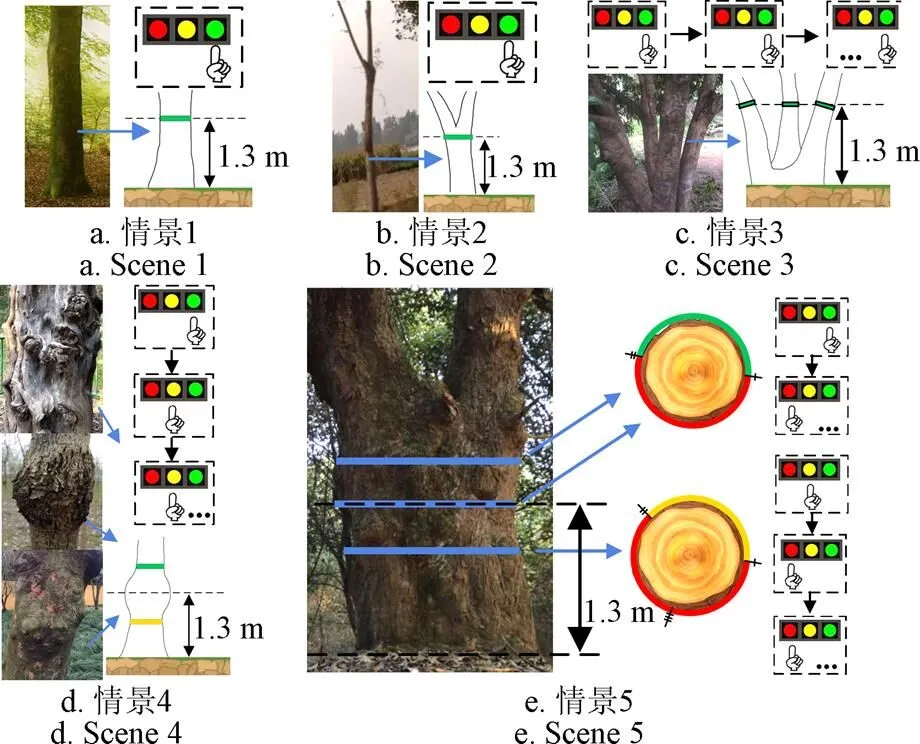
图10 单木勘查作业情景图
2.3 数据管理
立木胸径数据管理的数据流遵循自顶向下、逐层分解的设计思路,系统数据流图如图11所示。

图11 系统数据流
Android端应用:基于Android Studio开发平台使用Java编程语言设计的Android应用,包含了数据通信、数据的提取与显示、数据的保存与上传等功能,供现场的林业勘察员使用。
Web端应用:通过Nginx服务器和Mysql数据库使用Html、JS、PHP语言搭建,并部署在云服务器上,其主要功能为数据处理、分析与展示,供后端的林业数据管理员使用。
3 结果与分析
3.1 测量精度与作业效率评价
为验证装置的测量精度与作业效率,于2022年5月开展试验,试验地点为北京林业大学校园(116.33°E,39.99°N),使用的设备有传统围尺(太平洋牌)1个、便携式高精度立木胸径测量装置1台、电子拉绳传感器(台州市椒江西域电子厂制)1台,上述3种设备的配置参数见表1,3种设备的单木作业对比如图12所示,具体评价方法如下:
1)测量精度评价:使用上述3种设备依次测量试验地点内银杏(L.)、圆柏()、刺槐()、洋白()、鹅掌楸()、杂交鹅掌楸()、臭椿()、梅()、美桐()、七叶树()、白皮松()、油松()、雪松()等共196株立木。使用系统误差最小和分辨力最高的电子拉绳传感器所采集的数据作为真值,再将传统围尺和本文装置所采集的数据分别作为测量值,计算平均绝对误差(Mean Absolute Error,MAE)、平均绝对百分比误差(Mean Absolute Percentage Error,MAPE)、均方根误差(Root Mean Squared Error,RMSE)和相对均方根误差(Relative Root Mean Square error,RRMSE)、误差(Error,Err)等指标进行评估,其计算公式为:
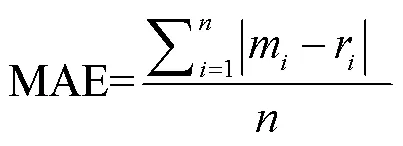

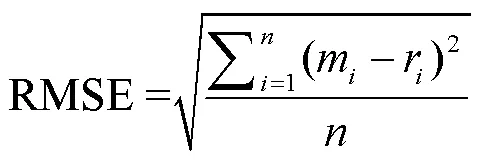

Err=
mi
−
ri
(13)
式中为试验中的立木总数,=196。
2)作业效率评价:在试验地中选取1块有42株立木的小样地,立木相互间距约为2~5 m;采用本文装置测量时1人1组,测量完后通过手机App直接上传到数据库;电子拉绳传感器测量时2人1组,1人测量,1人通过手机App蓝牙获取数据点击按钮记录,测量结束后也直接上传到数据库;传统围尺测量时2人1组,1人测量读数1人记录,测量结束后再由其中1人将纸质记录表中的数据录入电脑并校对;记录下上述各组作业期间所消耗的时间,计算单木平均耗时、人力耗时、单木人均耗时来进行评估,其计算公式为:

式中1为单木平均耗时,2为人力耗时,3为木人均耗时,o为内业时长,f为外业时长,o为内业人数,f为外业人数t为样地中的立木总数,t=42。
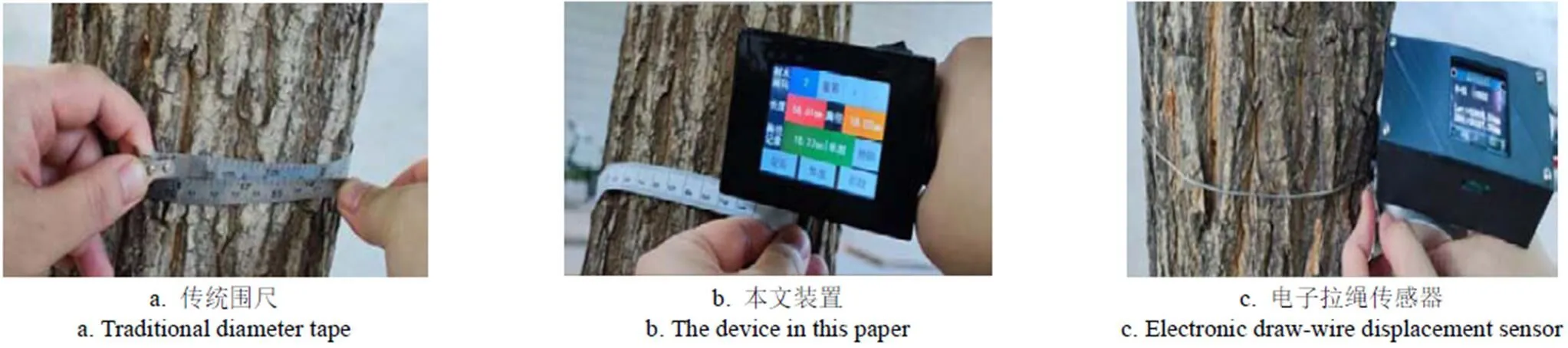
图12 3种设备之间的单木勘查作业对比

表1 3种设备的配置参数Table 1 Configuration parameters of three devices
3.2 测量精度结果分析
表2为传统围尺和本文装置对不同径阶级下胸径的测量精度,其中径级组是参照森林资源二类调查技术手册中的径阶距并采用上限排外法来划分[4, 42]。在不同径级组下2种设备胸径测量值的误差分布如图13所示。由表2可知,本文装置各个径级组的精度指标绝大多数都优于传统围尺,总体MAE为0.08 cm、MAPE为0.37%、RMSE为0.12 cm、RRMSE为0.54%,优于传统围尺;由图13可知,本文装置的误差点在−0.5~0.5 cm范围内且小径级的误差在−0.25~0.25 cm,而传统围尺部分小径级的误差点离零点距离超过0.25 cm。本文装置测量精度更高。

表2 不同径级下2种设备的胸径测量精度Table 2 Accuracy of two types of device DBH measurement under different diameter class groups
注:MAE为平均绝对误差;MAPE为平均绝对百分比误差;RMSE为均方根误差;RRMSE为相对均方根误差;I为小径级,胸径范围5.0~12.9 cm;II为中径级,胸径范围13.0~24.9 cm;III为大径级,胸径范围25.0~36.9 cm;IV为特大径级,胸径≥37.0 cm。
Note: MAE represents mean absolute error; MAPE represents mean absolute percentage error; RMSE represents root mean squared error; RRMSE represents relative root mean square error; I represents small diameter class, DBH range 5.0-12.9 cm; II represents middle diameter class, DBH range 13.0-24.9 cm; III large represents diameter class, DBH range 25.0-36.9 cm; IV represents extra large diameter class, DBH≥37.0 cm.
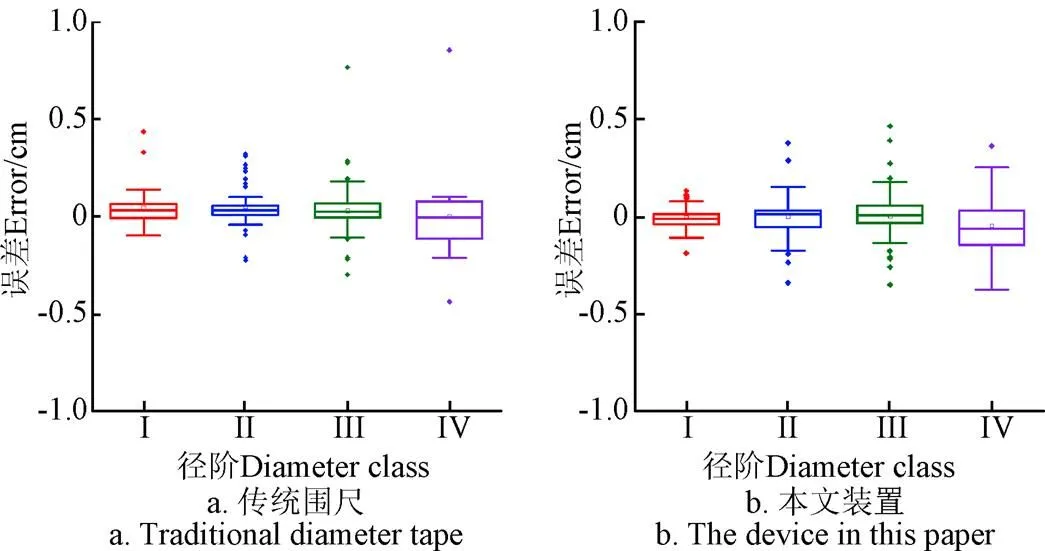
图13 不同径级下2种设备胸径测量值的误差分布图
3.3 作业效率结果分析
表3为3种设备的作业效率。由表3可知,本文装置单木人均耗时仅为9.3 s,本文装置的单木人均耗时最短,单木人均耗时分别约为电子拉绳传感器的1/2、传统围尺的1/3;相较于胸径围尺测量,本文装置在外业上只需1人,省去了读数和计数的环节,在内业上无需录入和校对数据;相较于电子拉绳传感器,本文装置只需1人且更加轻巧。

表3 3种设备的作业效率Table 3 Work efficiency of 3 types of device s
4 成本与实用性分析
随着国内森林资源调查要求的不断提高,传统胸径围尺虽然价格便宜(仅为2~10元)、体积小巧,质量为42 g,但在数据量测、记录和入库上短板明显。
非接触式:相机[28]或手机[32]的价格为0.5万元~1万元;摄影测树仪[26]的价格不低于1万元,质量为3.5 kg;背包式激光雷达[42]的价格至少在10万元以上,质量为6kg,还需复杂的后处理软件;且上述三者受环境因素干扰大,无法适用于茂密林分,因此难以推广。
卡测类:MD-II电子卡尺[13]的价格为2万元,质量大于0.8 kg,容栅胸径尺[34]的成本约为0.5万元,质量大于1 kg,但还存在量程有限、不便携带、对特殊树形适用性差等问题,缺乏市场吸引力。
电子拉绳类:传感器的成本在300~800元,还需集成200元以上高位数模数转换模块(至少20位)的处理电路[4, 35-36]才能具备高分辨力,质量大于0.5 kg,且体积过大、拉绳容易折断[13],实际应用效果不佳。
本文装置所用的12位编码器为135元,制作总成本仅为260元,质量为230 g,单木人均耗时约为传统围尺的1/3,因此调查规模越大所节省的人力成本越多。
5 结 论
本研究研制了一款便携式高精度立木胸径测量装置。在研究中,基于隧道磁阻旋转编码器所提出了一种结合低成本、轻小型机电结构和高分辨力处理算法的方法,根据该方法所设计的机电结构实现了将立木胸径从机械量转变为磁电信号,分析了系统误差和分辩力的变化范围,还开发了与之配套的系统软件用于嵌入处理算法、实现不同测树情景下的人机交互以及存储、上传、入库等数据管理功能。经验证,该装置对不同径级组下的立木胸径测量精度比传统围尺高,总平均绝对误差为0.08 cm、平均绝对百分比误差为0.37%、均方根误差为0.12 cm和相对均方根误差为0.54%,符合国家森林资源连续清查技术规定的精度要求;作业效率高,无需手工记录、录入和校对数据,省时省力,只需单人作业,人均每棵立木测量耗时为9.3 s。经比较,该装置通过软件手段解决了传统围尺在数据量测、记录和入库上存在的技术短板,可节省作业时所耗费的人力成本;比非接触式、卡测类、电子拉绳类仪器在硬件制造成本上能节省几百到上万元,造价仅为260元,质量仅为230 g,携带方便,具有较大的市场吸引力和实用价值,在森林资源调查中具有广阔的应用与推广前景。
在后续研究中,可通过使用低功耗处理芯片和远程通信模块进行改进,在树木胸径生长量持续监测的研究上展开探索,另外还可集成树高、树冠、树木位置等的测量和智能编码功能,为数字林业的建设提供技术支撑。
[1] 孟宪宇. 测树学[M]. 北京:中国林业出版社,1996.
[2] 冯仲科,赵春江,聂玉藻,等. 精准林业[M]. 北京:中国林业出版社,2002.
[3] 黄晓东,冯仲科,解明星,等. 自动测量胸径和树高便携设备的研制与测量精度分析[J]. 农业工程学报,2015,31(18):92-99.
Huang Xiaodong, Feng Zhongke, Xie Mingxing,et al. Design and experiment of forest intelligent surveying and mapping Instrument[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(18): 92-99. (in Chinese with English abstract )
[4] 刘海洋,冯仲科,呼诺,等. 手持式高精度立木胸径测量设备设计与试验[J]. 农业机械学报,2018,49(9):189-1940.
Liu Haiyang, Feng Zhongke, Hu Nuo, et al. Design and experiment of portable high precision equipment for tree diameter measurement[J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(9): 189-194. (in Chinese with English abstract)
[5] 郑似青,方陆明,郑辛煜,等. 基于角度传感器的树木胸径测量装置研制[J]. 传感技术学报,2020,33(10):1399-1405.
Zheng Siqing, Fang Luming, Zheng Xinyu, et al. Development and testing of a tree breast diameter measuring device based on angle sensors[J]. Chinese Journal of Sensors and Actuator, 2020, 33(10): 1399-1405. (in Chinese with English abstract)
[6] Alparslan A, Anthonie V L. Forest Mensuration[M]. Dordrecht: Springer Netherlands, 2007: 118-121.
[7] Hui G, Zhao X, Zhao Z, et al. Evaluating tree species spatial diversity based on neighborhood relationships[J]. Forest Science, 2011, 57(4): 292-300.
[8] 关炳福. 关于森林资源连续清查工作中提高样木胸径测量精度的探讨[J]. 内蒙古林业调查设计,2010,33(5):63-64.
[9] West P W. Tree and Forest Measurement[M]. Berlin: Springer Berlin Heidelberg, 2009.
[10] 沈磊,徐伟恒,孔雷,等. 林木直径测量方法现状与展望[J]. 四川林业科技,2018,181(2):69-74.
Shen Lei, Xu Weiheng, Kong Lei, et al. The present situation and prospects of tree diameter measuring methods[J]. Journal of Sichuan Forestry Science and Technology, 2018, 181(2): 69-74. (in Chinese with English abstract)
[11] Jean-Marie B, David P, Jeannot L. Comparison of relative accuracy and time requirement between the caliper, the diameter tape and an electronic tree measuring fork[J]. The Forestry Chronicle, 1995, 71(2): 197-200.
[12] 孙林豪,翁卫松,方陆明,等. 三段式立木胸径测量方法及装置设计与试验[J]. 林业科学,2021,57(5):130-139.
Sun Linhao, Wen Weisong, Fang Luming, et al. Design and experiment of three-stage measurement method and device for tree DBH[J]. Scientia Silvae Sinicae, 2021, 57(5): 130-139. (in Chinese with English abstract)
[13] 孙林豪. 树木胸径智能化测量系统的研究与实践[D]. 杭州:浙江农林大学,2020.
Sun Linhao. The Research and Practice of Intelligent Measurement System for Tree DBH [D]. Hangzhou: Zhejiang A&F University, 2020. (in Chinese with English abstract)
[14] Runkai Z, Dasheng W, Ruyi Z, et al. Estimation of DBH at forest stand level based on multi-parameters and generalized regression neural network[J]. Forests, 2019, 10(9): 778-778.
[15] Brovkina O, Latypov I S, Cienciala E, et al. Improved method for estimating tree crown diameter using high-resolution airborne data[J]. Journal of Applied Remote Sensing, 2016, 10(2): 026006-026006.
[16] 周润恺. 基于多参数的林分胸径估测研究[D]. 杭州:浙江农林大学,2019.
Zhou Runkai. Study on Estimation of Stand DBH Based on Multi-Parameters[D]. Hangzhou: Zhejiang A&F University, 2019. (in Chinese with English abstract)
[17] 王越,何诚,刘柏良,等. 基于无人机倾斜摄影技术的单木参数提取及胸径模型构建[J]. 西南林业大学学报(自然科学),2022,42(1):166-173.
Wang Yue, He Cheng, Liu Boliang, et al. Single wood parameters extraction and DBH model construction based on UAV tilt photography technology[J]. Journal of Southwest Forestry University, 2022, 42(1): 166-173. (in Chinese with English abstract)
[18] 贾鹏刚,夏凯,董晨,等. 基于无人机影像的银杏单木胸径预估方法[J]. 浙江农林大学报,2019,36(4):757-763.
Jia Penggang, Xia Kai, Dong Chen, et al. Predicting DBH of a single Ginkgo biloba tree based on UAV images[J]. Journal of Zhejiang A&F University, 2019, 36(4): 757-763. (in Chinese with English abstract)
[19] 张玉薇,张超,王娟,等. 基于UAV遥感的单木冠幅提取及胸径估算模型研究[J]. 林业资源管理,2021(3): 67-75.
Zhang Yuwei, Zhang Chao, Wang Juan, et al. Individual tree crown width extraction and DBH estimation model based on UAV remote sensing[J]. Forest Resources Management, 2021(3): 67-75. (in Chinese with English abstract)
[20] 孙浩,刘晋浩,黄青青,等. 基于二维激光扫描的立木胸径计算方法性能分析[J]. 农业机械学报,2017,48(8):191-196.
Sun Hao, Liu Jinhao, Huang Qingqing, et al. Performance analysis of calculation method for DBH of standing tree based on two dimensional laser scanning[J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(8): 191-196. (in Chinese with English abstract)
[21] Liang X, Kukko A, Kaartinen H, et al. Possibilities of a personal laser scanning system for forest mapping and ecosystem services[J]. Sensors, 2013, 14(1): 1228-1248.
[22] Liang X, Kankare V, Hyyppä J, et al. Terrestrial laser scanning in forest inventories[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2016, 115: 63-77.
[23] Wang P, Li R, Bu G, et al. Automated low-cost terrestrial laser scanner for measuring diameters at breast height and heights of forest trees[J]. PLoS One, 2019, 14(1): e0209888.
[24] Joris R, Richard A, Alexandra B, et al. Comparison of three algorithms to estimate tree stem diameter from terrestrial laser scanner data[J]. Forests, 2019, 10(7): 599-599.
[25] 赵自雨,冯仲科,田艺,等. UWB定位摄影测树仪设计与试验[J]. 农业工程学报,2020,36(17):167-173.
Zhao Ziyu, Feng Zhongke, Tian Yi, et al. Design and test of photographic dendrometer based on Ultra Wide Band (UWB) positioning[J]. Transactions of The Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2020, 36(17): 167-173. (in Chinese with English abstract)
[26] Lian Y, Feng Z, Huai Y, et al. Terrestrial videogrammetry for deriving key forest inventory data: A case study in plantation[J]. Remote Sensing, 2021, 13(16): 3138-3138.
[27] 黄晓东,冯仲科. 基于数码相机的样木胸径获取方法[J]. 农业机械学报,2015,46(9):266-272.
Huang Xiaodong, Feng Zhongke. Obtainment of sample tree's DBH based on digital camera[J]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(9): 266-272. (in Chinese with English abstract)
[28] Martin M, Xinlian L, Peter S, et al. Evaluation of close-range photogrammetry image collection methods for estimating tree diameters[J]. ISPRS International Journal of Geo-Information, 2018, 7(3): 93-93.
[29] Fan Y, Feng Z, Mannan A, et al. Estimating tree position, diameter at breast height, and tree height in real-time using a mobile phone with RGB-D SLAM[J]. Remote Sensing, 2018, 10(11): 1845-1845.
[30] 范永祥,冯仲科,陈盼盼,等. 基于RGB-D SLAM手机的森林样地调查系统研究[J]. 农业机械学报,2019, 50(8):226-234.
Fan Yongxiang, Feng Zhongke, Chen Panpan, et al. Research on forest plot survey system based on RGB-D SLAM mobile phone[J]. Transactions of the Chinese Society for Agricultural Machinery, 2019, 50(8): 226-234. (in Chinese with English abstract)
[31] Martin M, Jozef V, Julián T, et al. High precision individual tree diameter and perimeter estimation from close-range photogrammetry[J]. Forests, 2018, 9(11): 696-696.
[32] 陈盼盼,冯仲科,范永祥,等. 基于视觉里程计的森林样地调查系统研究[J]. 农业机械报,2019,50(10):167-174.
Chen Panpan, Feng Zhongke, Fan Yongxiang, et al. Research on forest plot survey system based on visual odometer[J]. Transactions of the Chinese Society for Agricultural Machinery, 2019, 50(10): 167-174. (in Chinese with English abstract)
[33] 黄晓东,冯仲科,王颖. 基于地面摄影测量的平朔矿区林分蓄积量研究[J]. 农业机械学报,2019,50(9):201-207.
Huang Xiaodong, Feng Zhongke, Wang Ying. Ground photogrammetry for investigation of stand volume in Pingshuo mining area[J]. Transactions of the Chinese Society for Agricultural Machinery, 2019, 50(9): 201-207. (in Chinese with English abstract)
[34] 孙林豪,方陆明,方益明,等. 基于容栅传感器的立木胸径测量装置研制[J]. 传感技报,2019,32(9):1435-1442.
Sun Linhao, Fang Luming, Fang Yiming, et al. Development of DBH measurement device using capacitive gate sensor[J]. Chinese Journal of Sensors and Actuator, 2019, 32(9): 1435-1442. (in Chinese with English abstract)
[35] 陈金星,张茂震,赵平安,等. 一种基于拉绳传感器的树木直径记录仪[J]. 西北林学院学报,2013,28(4):188-192.
Chen Jinxing, Zhang Maozhen, Zhao Ping’an, et al. A drawware sensor based tree diameter recorder[J]. Journal of Northwest Forestry University, 2013, 28(4): 188-192. (in Chinese with English abstract)
[36] 孙林豪,方陆明,唐丽华,等. 便携式树木胸径测量系统的研制[J]. 北京林业大学学报,2018,40(9):82-89.
Sun Linhao, Fang Luming, Tang Lihua, et al. Developing protable system for measuring diameter at breast height[J]. Journal of Beijing Forestry University, 2018, 40(9): 82-89. (in Chinese with English abstract)
[37] 赵若菲. 基于TMR的高位高精度磁编码器的设计与实现[D]. 杭州:杭州电子科技大学,2021.
Zhao Ruofei. Design and Realization of High-resolution and High-accuracy Magnetic Encoder Based on TMR[D]. Hangzhou: Hangzhou Dianzi University, 2021. (in Chinese with English abstract)
[38] 孙世荣. 基于TMR传感器的伺服电机磁编码器研究[D]. 杭州:杭州电子科技大学,2016.
Sun Shirong. Researches on the Technology of Servo motor magnetic encoder based on TMR Sensor[D]. Hangzhou: Hangzhou Dianzi University,2016. (in Chinese with English abstract)
[39] 于海,万秋华,孙莹,等. 一种自适应安装的高精度图像式角位移测量装置[J]. 中国光学,2020,13(3):510-516.
Yu Hai, Wan Qiuhua, Sun Ying, et al. A high precision image angular displacement measurement decice with self-adaptive installation[J]. Chinese Optics, 2020, 13(3): 510-516. (in Chinese with English abstract)
[40] 李凤日. 测树学(第四版)[M]. 北京:中国林业出版社,2019.
[41] 国家林业和草原局. GB/T 38590-2020森林资源连续清查技术规程[S]. 北京:国家林业和草原局调查规划设计院,2020.
[42] 端木嘉龙. 基于背包激光雷达数据的人工林林木胸径提取算法研究[D]. 哈尔滨:东北林业大学,2020.
Duanmu Jialong. A Study of Planted Forest DBH Estimation Algorithms Using Backpack Laser Scanning Data[D]. Harbin: Northeast Forestry University, 2020. (in Chinese with English abstract)
Development and experiment of the portable high precision measurement device for tree DBH
Sun Linhao1, Feng Zhongke1,2※, Su Jueying1, Shao Yakui1, Lu Dangui1, Ma Tiantian1
(1.,,100083,; 2.,,,570228,)
The Diameter at Breast Height (DBH) (at a height of 1.3 m on the bole of a tree) has been one of the most important indicators during tree measurements in forestry resource inventory. However, the current DBH measurement cannot fully meet the requirement in recent years, due to the low portability, precision, efficiency, applicability, and stability, together with the complex operation, rudimentary software, high costs, and short range. In this study, an innovative device was developed to accurately, efficiently, and conveniently measure the tree DBH suitable for the complex tree shapes and the different diameter classes, while cost-saving in the office-field work survey. The specification of the device was as follows (size: 8.35 cm×5.80 cm×5.55 cm; weight: 230 g; resolution: 0.01 cm; linear range: 0-150 cm; battery capacity: 4 000 mAh input vatage: 3.7 V, output votuge: 5 V; micro-processor chip: STC15W4K48, 8 bits; encoder type: PD-1503-SDI, 12 bits). A Tunnel Magneto-Resistance (TMR) rotary encoder was also combined with the low-cost, small size, and light weight electro-mechanical structure, and high-resolution processing. As such, the measurement device was achieved in the electronization, digitization, portability, and integration of office and filed work for the tree DBH. A supporting system software was also developed, including the embedded software, mobile terminal application, and Web terminal application. In the process of an individual tree survey, the electro-mechanical structure of the device firstly converted the mechanical parameter of tree DBH to the magnetic signal, and then the magnetic signal was converted to an electrical signal. Secondly, the electrical signal was converted into the DBH measurement data using the processing integrated into the embedded software. Thirdly, the operation flow was better applied to measure the trees with special shapes and large diameters using multi-function key combinations. After all individual tree surveys, the DBH measurement data was transmitted by Bluetooth in the device to the Android application, and then uploaded to the database managed by the Web application. The measurement accuracy and operation efficiency of the device were verified to select the 196 standing trees with many tree species and a small sample plot of 42 standing trees in the Botanic Garden of Beijing Forestry University, China. The test results showed that the device presented a higher accuracy to measure the standing trees of different diameter classes than before. The total tree DBH measurement data from different diameter classes (weight: 1 092 g; resolution: 0.001 cm; linear range: 0-500 cm) indicated the mean absolute error (MAE) of 0.08 cm, Mean Absolute Percentage Error (MAPE) of 0.37%, Root Mean Square Error (RMSE) of 0.12 cm, and Relative Root Mean Square Error (RRMSE) of 0.54%, compared with an electronic draw-wire displacement sensor. In addition, a high measurement efficiency was achieved, where the average measurement time per person of each tree was 9.3 s from the efficiency test. The devices demonstrated nearly two times faster than the traditional diameter tape (weight: 42 g; resolution: 0.01 cm; linear range: 0-200 cm), while one time faster than the electronic draw-wire displacement sensor. Additionally, the price of the device was only 260 RMB, due to a 12 bits encoder (price: 135 RMB). In conclusion, this device behaved at a low cost and less labor consumption, fully meeting the technical requirement of accuracy for the Continuous Forest Inventory (CFI) in China. Therefore, the finding can provide broad application prospects in forestry resource inventory.
forestry; measurements; design; DBH; tunnel magneto-resistance; encoder; forestry resource inventory
10.11975/j.issn.1002-6819.2022.15.004
S758.7
A
1002-6819(2022)-15-0031-11
孙林豪,冯仲科,苏珏颖,等. 便携式高精度立木胸径测量装置研制与试验[J]. 农业工程学报,2022,38(15):31-41.doi:10.11975/j.issn.1002-6819.2022.15.004 http://www.tcsae.org
Sun Linhao, Feng Zhongke, Su Jueying, et al.Development and experiment of the portable high precision measurement device for tree DBH[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2022, 38(15): 31-41. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2022.15.004 http://www.tcsae.org
2022-06-06
2022-07-11
海南省重点研发计划项目(ZDYF2021SHFZ256);北京林业大学科技创新计划项目(PTYX202105);国家自然科学基金项目(U1710123)
孙林豪,博士生,研究方向为林业装备与信息化。 Email:acesunlh@163.com
冯仲科,博士,教授,博士生导师,研究方向为精准林业、测绘与3S技术集成。Email:fengzhongke@126.com
