三维倾斜摄影技术在磷石膏渣场生产及运营管理中的应用
2022-11-09尹林江杨晓勇孙小琼
尹林江,李 威,李 江,杨晓勇,李 伟,孙小琼
(1.贵州科学院 贵州省山地资源研究所,贵州 贵阳 550001;2.贵州(磷化集团)有限责任公司,贵州 贵阳 550001)
近年来国家持续加大对工业固体废物、危险废物的污染防治力度,要求加快构建以数字经济为引领的现代产业体系:实施数字产业强链行动——推动在矿产、轻工、新材料、航天航空等产业领域建设国家级、行业级工业互联网平台,促进产业数字化转型,加快磷化工精细化、有色冶金高端化发展,持之以恒推进生态文明建设。全国人大、生态环境部等也要求各级环保部门,要充分利用大数据、5G、遥感等技术手段,加大工业固体废物、危险废物的全过程管理力度。
目前矿区存量测算普遍采用全站仪和GPS等传统监测手段[1],虽然其测算精度较高,但成本较高、效率低且现场测量存在一定的风险,无法满足企业现代化管理的需求。随着5G工业互联网基础设施的完善[2],无人机挂载不同的摄像头、传感器进行测绘、监管等在国内外的应用日渐普遍[3-6],且具有成本低、实时性强和操作简便等特点,在矿山资源以及渣场管理中有了广泛的实际应用[7]。磷石膏堆渣场是用于填埋工业生产过程产生的固体废弃物的露天性堆填场所,具有占地面积广、汇水面积大、易发生渗漏、坍塌、溃坝等特点。由于废渣进入渣场的多样性问题(如使用传送带、使用运输卡车等),使得渣场内堆填的工业固体废物具有填埋数据不清、堆体布局及安全性不清、库容占有率不清、库容剩余量不清等特点,使用常规的地磅称重或输送带称重等技术手段无法对产渣量进行计算,形成渣场防范风险和资源盘查的管理瓶颈。鉴于此,本文结合无人机遥测、GPS差分定位、大数据分析等技术,构建多期磷石膏渣场三维模型,进行渣场存量计算监测和三维可视化分析,为渣场的安全生产和资源管理提供技术支撑及数据保障。
1 倾斜摄影基本原理
倾斜摄影测量技术是通过飞行器搭载一个或者多个传感器,从一个垂直、四个倾斜不同的视角采集影像,获取到丰富的地物顶面及侧视的高分辨率纹理。利用计算机技术、影像密集匹配技术自动匹配同名点,生成密集匹配点云,提取地物特征点,在此基础上通过相应的滤波算法构建不规则三角网(TIN),同时结合影像的POS数据和地面像控点坐标信息构建三维模型。三角网的大小、密度与获取影像的重叠率以及地物自身的复杂程度息息相关,重叠率越高,生成的三角网越密集,地物越复杂,则所需的三角网越密集和复杂。目前三角网的构建主要是以密集匹配点云为基础,运用相关算法构建相应分辨率的三角网,同时优化简单的物区,减少冗余数据,最后生成不规则三角网模型框架[9]。
倾斜摄影测量多以无人机为载体,具有成本低、机动灵活、飞行尺度较大、环境要求低等优点,并可获取高分辨率的照片,有助于获取更高精度的三维模型。常用的航测无人机有大疆的M300、大疆精灵4RTK、科威泰KWT-6和DM-150等。除大疆精灵4RTK外,其余无人机均搭载五镜头相机,可在同一时间和同一点上获取地物的五个角度的信息,使得对于同一地物在光源信息获取上具有统一性,不易产生色差;而大疆精灵4RTK多为单镜头相机,需规划多个角度进行数据采集,使得对于同一地物存在数据上的时间差异,可能会导致获取的影像因为光线的原因存在色差[10]。本文采用大疆公司生产的经纬M300RTK,搭载的镜头为睿铂中端系列产品RIY-D2M,兼具Pros高端系列部分强大功能与经济型相机的高性价比特点。目前,RIY-D2M已经被全国各个地信相关单位采用,其应用范围包括但不限于地籍测量、智慧城市建设、房地一体、应急测绘、BIM规划等方面。
2 研究资料与方法
2.1 研究区概况
研究区位于贵州省开阳县金钟镇的一个磷石膏堆渣场,占地约为180ha,属于亚热带季风气候,年平均气温为16.1℃,年均降水量1 120~1 129mm;靠近矿区的采空区,且堆积体的边缘为陡峭和陡倾斜的斜坡;基岩地层属于震旦系上统陡山沱组、上统灯影组和下统南沱组[11]。同时,由于其处于洋水背斜核部的次一级背斜,区内褶皱、断层发育,基底稳定性较差,堆积体容易发生滑动和崩塌等灾害,对渣场的安全和生产管理造成严重影响。
2.2 技术流程
本研究的技术流程主要分为数据采集、数据预处理、三维模型构建和存量估算四个部分(图1)。数据采集,主要为前期的像控点布设测量、渣场的航线规划和航飞前的检查,保障航飞安全顺利进行。数据预处理,由于本研究采用的传感器为睿博五镜头相机,其照片和POS数据分离,需将POS数据写入照片中。除此之外,在进行三维建模时,需要加入像控点坐标进行刺点,保障三维建模精度。三维模型构建,通过前期的数据预处理,对数据进行空中三角测量,构建不规则三角网,纹理映射等,最后生成DSM和三维模型等。存量估算主要采用Das Viewer和Context Capture Viewer基于三维模型,通过自定义标高进行渣场的存量估算,并运用实地测量数据精选精度验证。

图1 技术路线
2.3 数据获取
为提高三维建模精度,需建立传感设备如相机所摄像片与目标物之间的数学关系,从而进行空三解算以便获取测区模型,而地面像控点的布设数量和位置,在一定程度上会影响实景三维模型的精度,同时像控点布设的合理与否,直接决定了外业测绘工作量的大小及建模成本。为实现渣场的全面控制,设置地面控制点16个,均匀分布于渣场,像控点布设间隔约为200 m。另外测量10个点作为精度验证点。
该区域海拔在760~1 051m之间,相对高差较大。为了保障无人机的飞行安全,对地形地貌进行室内软件分析以及实地无人机飞行实验。考虑到区内地势西南高东北低,且堆渣场西南边存在高压线,西南边无人机信号易被干扰,故飞行地点选择位于堆渣场的中部偏右,飞行高度确定在海拔960m。同时为了保障最终数据的精度,根据相对行高计算公式:

式中:H为飞行相对高度,GSD为地面分辨率,a表示像元大小,f为传感器焦距。由式(1)可知,GSD值越小,则相对航高越低,获得的精度越高。
结合式(1),并综合实际精度需求和仪器参数,飞行高度为170m,旁向重叠率70%,航线重叠率70%,共计47条航线,为减少风力作用的影响,采用等距拍照模式。由于数据采集的范围较大,采集时间较长,为保障采集照片的质量,数据采集均采用同一航线规划工程文件,日期分别为2021年12月24日、2022年3月27日和2022年6月2日,时间均为13:00~15:30,天气晴朗,风力0~3级。每次分别采集照片10 570张,照片大小为6 000×4 000像素。而为了使得部分建筑细节更加突出,采用精灵4RTK协同作业,每期获取高分辨率的建筑影像500张,使得建模结果更加清晰。
3 实验过程与结果
目前,倾斜摄影实景建模的软件较多,如美国的Context Capture、法国的Street Factory、瑞士的Pix4d Mapper和俄罗斯的Photo Scan以及大疆的DJI Terra等。本文主要选取精度相对较高、人为干预少的Context Capture作为无人机的三维建模的软件,构建三期磷石膏渣场三维模型和DSM。使用Context Capture Viewer和Dsa Viewer进行磷石膏存量变化测算,通过前人的研究发现,当测算的格网大小为4.5m和5m时,所计算的误差最小[12]。因此本研究采用上述方法进行三维建模及其存量估算。
3.1 空中三角测量
由于本研究采用的是睿博五镜头相机获取渣场三维影像,其影像不包含坐标及高程信息,需将POS数据写入影像中,再构建工程文件,将包含所有信息的影像导入,为下一步空中三角测量做准备。
空中三角测量主要是确定相邻影像间的位置关系,并生成加密点,其所需的文件包括相机参数文件、POS数据、航片数据以及地面像控点数据。其中像控点的加入有助于空三加密的影像匹配速度与精度以及便于坐标的转换,同时可对空中三角测量成果进行控制加密[13]。在进行空中三角测量时,除了软件自身空中三角测量时自动进行影像之间的位置匹配并生成加密点外,还需进行手动的刺点,即将像控点数据与影像相对应,进而提高空中三角测量的精度和通过率。在进行刺点时,可先选择边缘点进行刺点,运行一遍空中三角测量,运用空三结果,软件将给出其余点的预测位置,再进行第二次的刺点并进行第二遍空中三角测量。空中三角测量结束后,需检查空三结果,是否出现偏移、影像分层和结果位置偏移等,保证后期三维建模的精度。经查证,本文空三结果未出现上述情况,可进行下一步模型的构建(图2)。

图2 空中三角测量结果
3.2 模型构建
运用空中三角测量得到的密集成果,运用光束法区域网平差,获取影像的外方位元素,结合影像匹配算法,生成密集点云[14]。通过密集点云构建不规则三角网TIN,得到无纹理信息的三维模型(白模),然后匹配TIN的每一个三角面与影像纹理,进行模型的自动纹理映射,进而得到高可视化的实景三维模型。最后对模型进行分瓦片处理,通过构建S3C索引文件,最终可看到整个完整的三维模型(图3),同时也便于后期对三维模型的修改和显示。

图3 三维模型过程与结果图
3.3 模型精度评价
为保障模型的精度,基于三期的渣场三维模型,以地面实测点坐标作为真实值,多次测量模型中的坐标值,并取平均值作为模型值,进行中误差计算,其计算公式为:

式中:mx为x方向上的中误差,n为像控点的个数,my为y方向上的中误差,mh为h方向上的中误差,△x、△y和△h分别为x、y和h方向的真误差,m为平面中误差。利用x和y方向中误差进行平方求和,并进行开平方根,其最终结果表示像控点精度的可靠性(表1)。
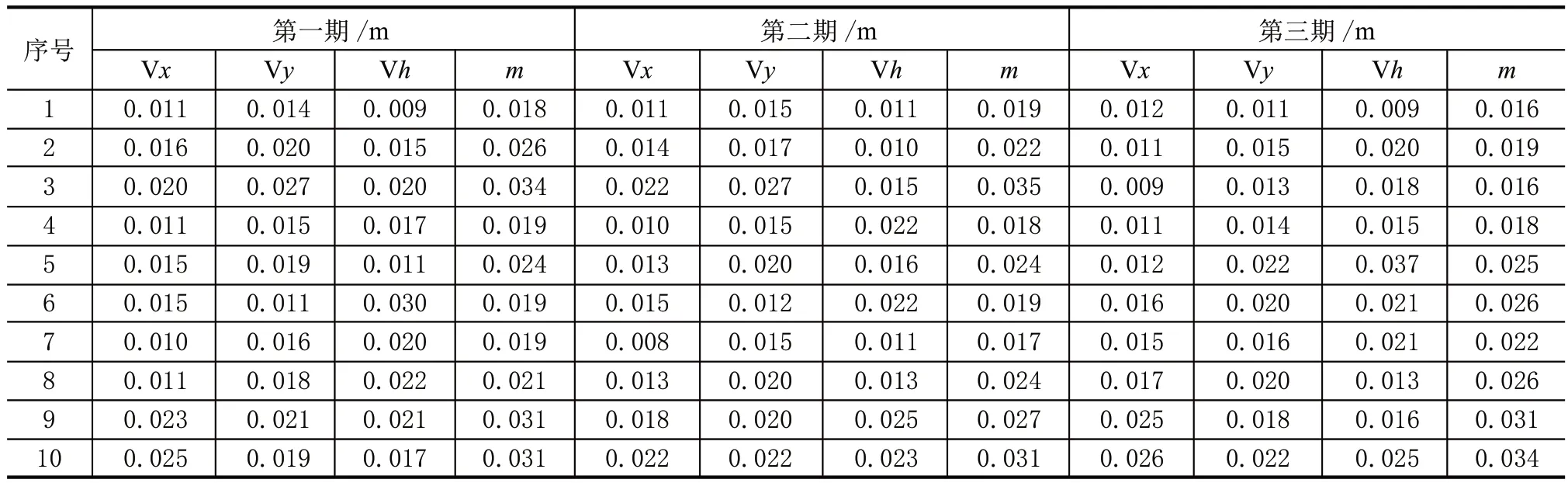
表1 三维模型检查点精度统计
通过高程中误差和平面中误差,来评定整个渣场三维建模在水平和垂直方向上的精度。根据DB33/T 934-2014《三维数字地图技术规范》中1:500比例尺模型精度的要求,平面精度≤0.30 m,高程精度≤0.24m。根据计算结果可知,在渣场三期模型精度计算结果中,第一期平面中误差最大为0.034m,高程中误差最大0.030m;第二期平面中误差最大为0.035m,高程中误差最大0.025m;第三期平面中误差最大为0.031m,高程中误差最大0.037m。其精度值均满足技术规范的要求,可以用于渣场存量的估算和变化监测。
4 渣场存量估算与变化监测
4.1 渣场存量估算
对经过精度评价的三维模型,运用Context Capture Viewer 软件进行渣场的存量精选估算,并结合实际测量数据精选精度评价。由于企业需求,不能够对整个磷石膏渣场存量进行测算公布,因此本文仅选取三个样区进行估算,同时为了探究采样间距对于存量的影响,本文选取1m、3m和5m作为采样间距进行存量估算,其结果如表2所示。从表2可以看出,在实际测量时,样区1和3的存量变化相对较慢,通过实地考察也发现该区域的生产活动较弱。而样区2的变化则较为明显,其存量的变化较大,可知该区域的生产活动较强。

表2 堆渣样区存量模型估算与实测
通过软件测量的值减去实测值,用两者差值的绝对值比上实测值,可得两者的差值百分比(表3)。从表3中可以看出当采样间距为5m时,其存量的差值百分比相对于1m和3m的采样间距要小,精度相对较高。而当采样间距为1m时,其差值百分比最大,精度相对较低。

表3 堆渣样区存量模型估算与实测存量差值百分比
4.2 渣场变化监测
基于两期堆渣场(第一期数据和第三期数据)的无人机三维和DSM数据,经过预处理和精度校验后,进行差值计算,得出挖填方计算结果,即渣场填挖方变化量,并作可视化展示(图4)。其中凸起来的区域表示该区域在经过这段时间后,地表堆积量增加,而凹下去的区域则表明该区域的存量有所减少。由此可知整个渣场填挖方量分布情况,掌握渣场的主要生产活动区。除了对存量变化监测及估算以外,为及时掌握周边环境现状和堆渣区覆土面积工程进度情况,可利用三维模型,进行土地利用类型识别以及周边生态环境监测,测量覆土曲面面积,以保障周边生态环境安全,确保工程进度。
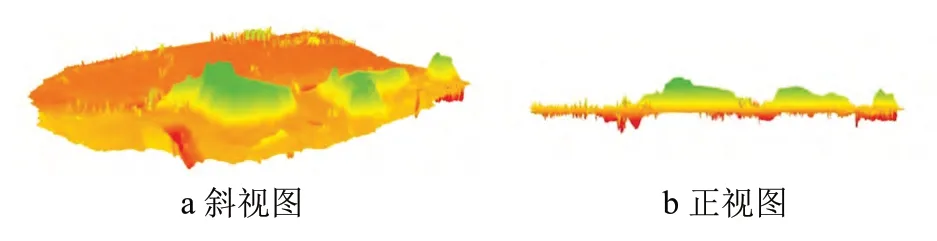
图4 渣场局部区域的挖填方可视化结果
5 结论
基于无人机倾斜摄影技术构建磷石膏渣场三维模型,其建模效率高、模型精度高、现实还原度高,借助软件测量渣场存量,并运用实测数据进行精度验证,可实现企业对渣场信息的全面掌控,降低企业运营成本和生产风险。本文通过构建三期渣场三维模型,其精度在x方向上的最大中误差值为0.026m,在y方向上的最大中误差值为0.027m,在h方向上的最大中误差为0.037m,其平面精度中误差最大为0.034m,各方位精度值均低于相关规范要求,建模结果可用于存量的动态监测。在样区存量估算中,其采样间距为5m时,其估算结果最为接近。同时,结合生产需求,运用两期数据,较为直观地展示了渣场的生产活动情况以及存量的变化情况,为渣场的生产及安全运营管控提供了技术和数据支持。
本文也存在一些不足,在渣场的堆积物模型构建上具有较高的精度,但对于面积较大的水体,会出现模型的空洞,不利于对渣场坝区水体的监测。对于部分建筑或地物的拍摄死角,同样会存在地物信息的缺失。对此,本文运用精灵4RTK无人机,进行低空地面信息和拍摄死角的数据采集,弥补了因数据问题带来的精度不足。除此之外,在三维数据的挖掘上还有所欠缺,后期将加强对数据的挖掘和分析,提高数据的利用价值,更好的为地方和企业服务。