基于拓扑动态调整的分段接线故障限流控制方案
2022-11-08周启文朱炳铨刘云飞潘武略
周启文,朱炳铨,刘云飞,余 越,韩 彬,潘武略
(1.南京南瑞继保电气有限公司,南京 211102;2.国网浙江省电力有限公司,杭州 310007;3.电网安全与节能国家重点实验室(中国电力科学研究院),北京 100192)
0 引言
近年来,随着我国电力建设的持续发展、用电负荷的不断增加以及各大区交直流电网的紧密互联,电力系统短路电流水平不断升高,严重威胁断路器开断能力。目前短路电流超标问题已经成为“长三角”“珠三角”等负荷密集地区以及西北等电源密集地区的共性问题[1-3],研究短路电流限制方法对保障电网安全稳定运行具有重要意义。
从原理上讲,限制短路电流主要是通过增大故障点等值短路阻抗来实现的,常规手段主要有3种。一是改变系统结构或运行方式[4-6],但可能导致电网结构变化较大,牺牲了电网结构的完整性,对系统运行带来负面影响。二是加装限流电抗器[7],主要有串联电抗器、分裂电抗器等。限流电抗器虽然可以有效降低短路电流水平,但可能导致潮流分布不均,影响电网高效运行;同时高电压等级限流电抗器占地面积较大、造价昂贵,对于负荷中心变电站,受场地限制改造困难,难以实施。三是采用故障限流器,故障限流器技术方案[8-11]有数十种之多,其中基于超导材料、固态器件、串联谐振电路的故障限流器能较好地兼顾系统正常运行和限制短路电流,但受技术成熟度、经济性等因素制约,工程应用不多,特别是在220 kV 及以上高电压等级电网应用较少。目前基于电磁斥力操作机构的高速开关技术成为故障限流器的研究热点[12-15],高速开关可在数毫秒内实现分闸,采用高速开关动态投退限流电抗器以限制短路电流的方法已有工程示范应用[16-20],并取得了良好的限流效果,但因设备总体投资过高限制了其大规模推广。文献[21]采用断线限流策略和高速开关技术,提出了基于高速开关和拓扑动态调整思想的短路电流限制方法,并分析了短路电流限制原理、对系统的影响以及高速开关关键技术,为短路电流抑制问题提供了新的解决方案,但并未对所述方法的核心设备之一的控制系统作进一步研究。故障限流控制系统实现的关键在于其动作的快速性,与常规继电保护相比,其动作时间必须足够小且具备充分的裕量,这也意味着常规继电保护装置的软硬件设计方案和基于傅氏变换的故障检测识别方法不再适用。
针对如何实现故障限流控制系统速动性这一关键问题,本文在分析分段接线拓扑动态调整方法的基础上设计了基于高速数据处理和FT3 通信方案的控制系统架构,解决了常规继电保护装置计算能力不足和通信延时大的问题,并提出基于卡尔曼状态估计的故障快速识别和相控开断方法,缩短故障检测时间和高速开关燃弧时间,最后通过RTDS(实时数字仿真)试验对控制系统进行了验证。
1 分段接线拓扑动态调整方法
1.1 拓扑动态解列
基于拓扑动态调整的故障限流方法基本原理是:在正常运行期间系统保持正常拓扑,发生故障后通过高速开关快速动态调整系统拓扑结构,增大系统联系阻抗,从而降低故障点短路电流水平。
图1给出了拓扑动态调整方法的基本原理,其中z1和z2分别为电源S1和S2的等效阻抗,z3为节点p 和节点q 之间的直接连接阻抗,z4为节点p 和节点q 之间除z3外通过其他路径合环的等效转移阻抗,K为拓扑调整高速开关。当节点p和节点q分别为同一变电站的两条分段母线时,K 为分段开关,z3=0;当节点p和节点q分别为相邻变电站母线时,K为线路开关,z3为联络线阻抗。
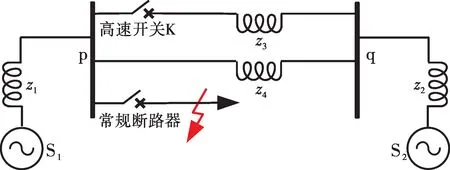
图1 基于拓扑动态调整的故障限流基本原理
正常运行方式下高速开关K 闭合,系统合环运行;当节点p所联线路出口发生短路故障时,高速开关K 快速分断改变系统拓扑结构,使电源S2对故障点的转移阻抗从z2+z3||z4迅速增大至z2+z4,从而降低电源S2支路馈入故障点的短路电流,限流起效后由常规断路器动作切除故障。
本文主要研究分段接线场合采用拓扑动态调整抑制短路电流的方法。当p侧母线、线路出口或者主变压器低压侧任意点发生故障时,分段电流(单分段接线)或其矢量和(双分段接线)表征了q侧电源及其部分支路对故障点短路电流的贡献;同样地,q侧故障时分段电流或其矢量和表征p侧馈入故障点的短路电流。因此分段电流或其矢量和过流可作为高速开关解列动作判据。
1.2 拓扑自动恢复
从提高电力系统自动化、智能化水平的角度,故障切除后拓扑调整开关需要自动恢复到故障前状态以确保系统供电可靠性。对于双分段接线,由于同时控制多个拓扑调整开关,各个开关之间需遵循一定的同期和顺控流程,针对分段接线设计了高速开关的拓扑恢复方案,具体流程如图2所示。
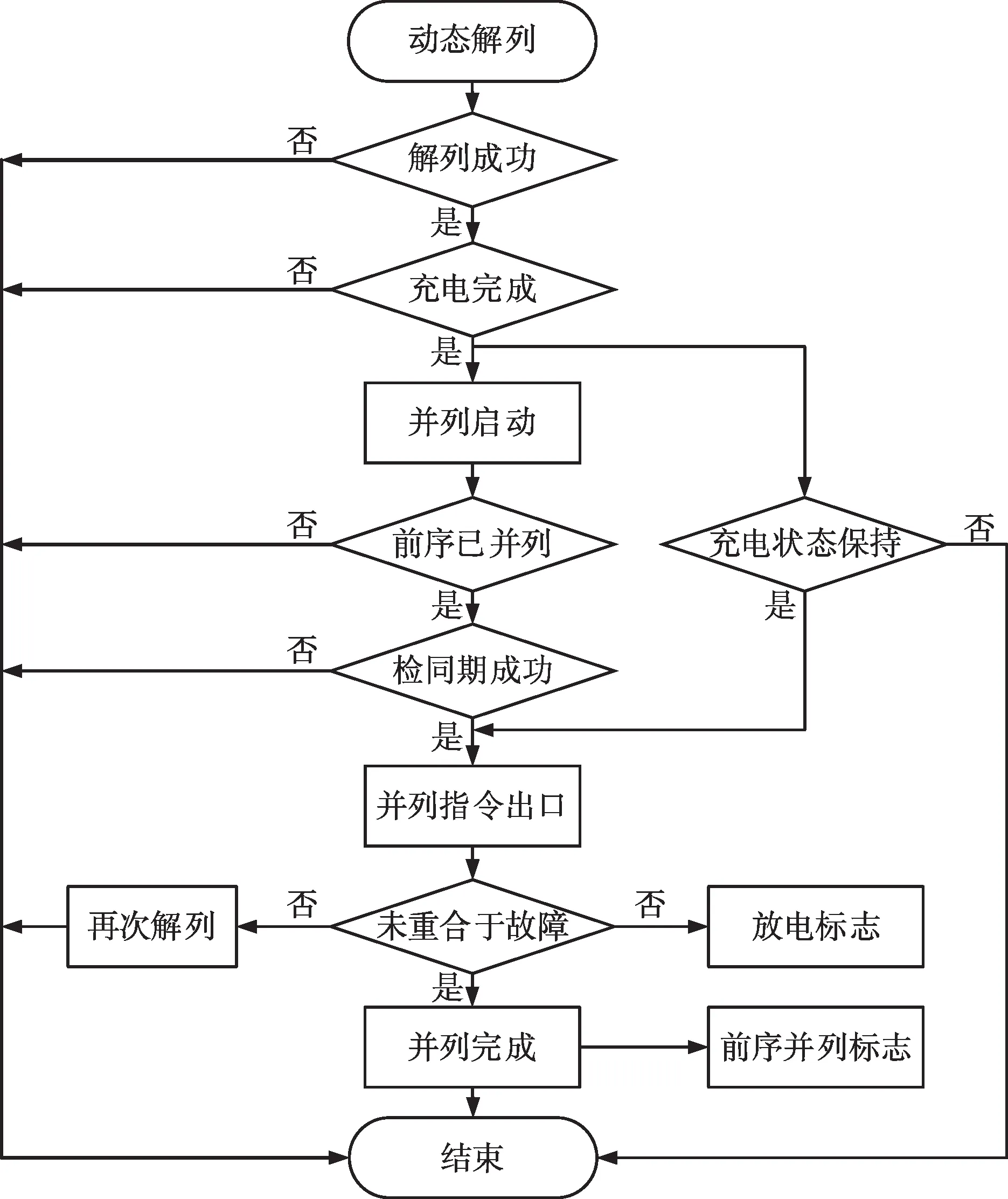
图2 单个拓扑调整开关自动并列流程
故障限流时各个高速开关同时解列,然后分别按照各自设定的时序依次恢复,在解列成功且重合充电完成的条件下启动并列程序,经过设定延时后判断前序开关已并列且检同期成功时,发出并列指令,若重合于故障则再次解列,若未重合于故障则并列完成。在整个流程中持续检测其充电状态,当出现保护闭锁、重合于故障等放电条件时立即放电,以闭锁并列流程。
2 故障限流控制系统
2.1 控制系统速动性要求
拓扑动态调整方法实现的关键在于高速开关与故障区域常规断路器的时序配合,图3给出了常规断路器和高速开关的动作时序示意,从故障发生到短路电流开断的整体动作时间均包括保护控制时间、分闸时间和燃弧时间3部分。

图3 常规断路器和高速开关的动作时序
为达到限制常规断路器开断短路电流的目的,高速开关最晚必须在常规断路器触头刚分之前完全开断,同时拓扑自动恢复时间应躲过故障完全切除的最长时间(考虑重合闸时间和后备保护时间),即满足:

式中:trelay、topen、trecls分别为常规断路器动作时序的保护控制时间、分闸时间和重合闸时间;分别为高速开关动作时序的保护控制时间、分闸时间、燃弧时间和重合闸时间。
目前常规高压继电保护和断路器分闸时间之和一般在20~40 ms,因此要求拓扑动态解列必须在短路电流的第一个周波内完成。
2.2 高速解列控制架构
为满足故障限流控制速动性要求,必须从降低链路传输延时和减小故障检测时间两方面实现动作加速,与常规断路器动作时间拉开级差。
表1给出了保护控制系统主要环节及其延时来源,对于常规交流继电保护装置,采样率一般为1.2 kHz,中断周期为833 μs,出口环节一般采用出口继电器硬接线方式,响应时间通常在数毫秒,数据采集、处理和传输能力在一定程度上限制了其动作速度。
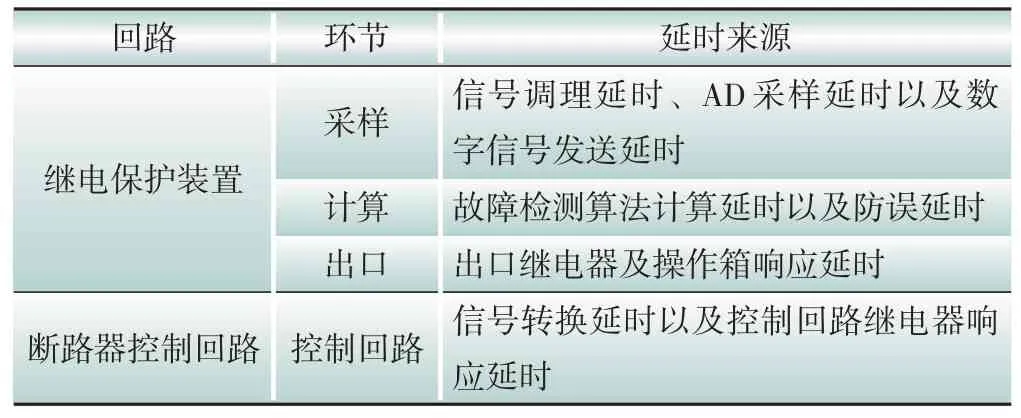
表1 保护控制系统主要环节及其延时来源
在现代电网智能化、网络化的发展趋势下,针对常规交流继电保护装置动作时间慢的问题,本文提出了满足拓扑动态调整方法的高实时性控制装置技术方案。故障限流控制系统架构如图4所示,采用高性能DSP(数字信号处理器)、大容量FPGA(现场可编程门阵列)和多信道高速总线技术提高装置性能,其中采样率为10 kHz,DSP 中断执行周期为100 μs,实现数据的高速同步处理,降低采样和计算环节的延时。同时,为提高动作出口速度,控制装置与拓扑调整高速开关本体控制回路之间采用光纤点对点FT3 协议通信,波特率为10 Mbps,下行高速开关分合闸指令,上行本体状态监视信号,从而实现动作指令在100 μs 内的可靠即时传输,大大缩短了链路传输延时。
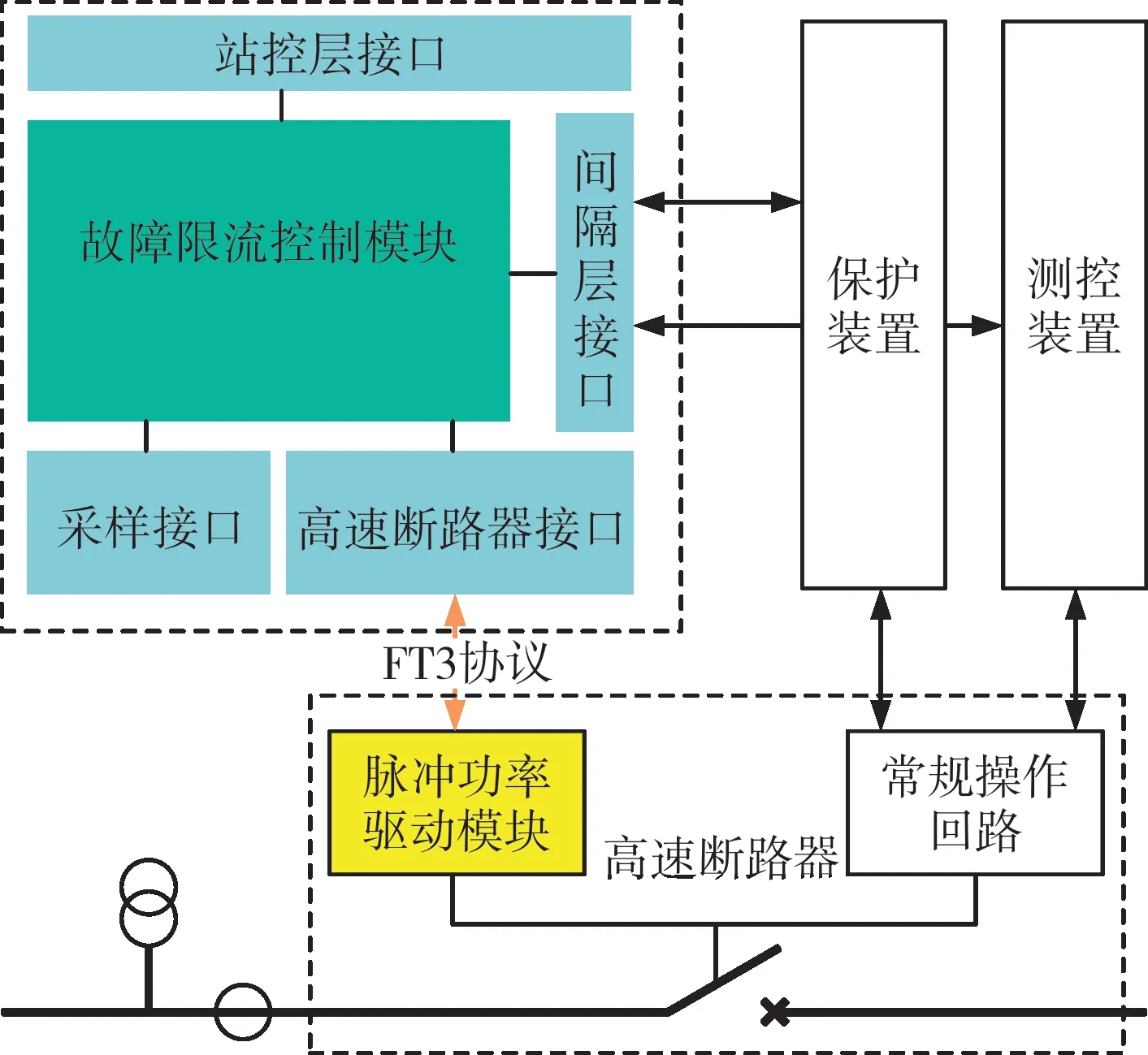
图4 故障限流控制系统架构
对于高速开关本体控制回路,采用脉冲功率技术驱动电磁斥力机构实现高速分闸,其中脉冲功率驱动模块同样采用FPGA 实现FT3 动作指令编解码并控制储能回路晶闸管开关快速放电。同时高速开关保留常规操作回路,作为保护、测控装置的接口。
2.3 故障快速识别技术
对于过流检测判据,本文采用快速启动的卡尔曼状态估计算法进行电流状态估计。卡尔曼状态估计是一种基于一阶马尔科夫模型的贝叶斯估计,包括预测和更新两个过程。假设系统动态方程表示为:

式中:下标k为第k个计算时刻;Xk为n×1 维的状态向量;Zk为m×1维的量测向量;Φk/k-1、Hk为已知的系统结构参数,分别为n×n维的状态一步转移矩阵、m×n维的量测矩阵;Wk为l×1维的过程噪声向量;Vk为m×1维的量测噪声向量,两者都是零均值的高斯白噪声向量序列,且它们之间互不相关。
线性卡尔曼估计由式(3)进行递推求解:

通过卡尔曼状态估计方程可以递推求解出短路电流基波分量幅值I1、初相角φ1、直流分量I0、衰减时间常数τ以及各次谐波含量,进而通过基波分量幅值I1和过流判据快速识别故障。同时相控开断技术通过预测故障电流过零点以控制高速开关动作时刻,可有效控制燃弧时间,减小触头电侵蚀,提高开断能力,并且对于提高高速开关的可靠性和延长寿命具有十分重要的意义。因此,通过短路电流基波分量幅值I1、初相角φ1、直流分量I0、衰减时间常数τ以及各次谐波含量可以重构短路电流波形,进而预测过零点以实现燃弧时间的精准调控。
卡尔曼状态估计中P0、Q、R等参数将对状态估计性能产生影响。协方差矩阵P0表示系统对初始状态X0的置信度,由于通常X0无法准确获取,P0取值应尽量大,以加快状态估计过程的收敛速度,取P0=κ×diag(a1,a2…an),其中κ为常数。协方差矩阵Q表示模型误差,例如模型的线性化、离散化误差等;协方差矩阵R为量测误差,与传感器的特性相关。这两个参数通过影响卡尔曼增益K的值,进而影响预测值和量测值的权重。在无法确切知道P0、Q、R的准确值先验信息的情况下,应适当增大Q的取值,以增大对实时量测值的利用权重,进而根据准确度、动态性能等要求进行调整。
卡尔曼算法涉及矩阵运算,在嵌入式系统中对硬件计算能力提出了很高的要求。然而,从卡尔曼状态估计方程可以看到,在初始条件确定的情况下,式(3)中矩阵Pk/k-1、Kk、Pk的计算仅由系统参数Φk/k-1、Hk、Qk、Rk决定,与量测值Zk无关,因此可以采用离线+在线的计算策略,预先对卡尔曼增益Kk和量测矩阵Hk进行离线计算,计算结果作为宏参数保存在内存中,当系统实时运行时直接调用,不同通道的状态计算过程可以复用参数。进一步地,取状态转移矩阵Φk/k-1为单位矩阵,卡尔曼状态估计方程的在线实时计算过程可以简化为仅对式(3)方程组中的方程4 进行递推求解。式(4)给出了电流状态具体计算过程,根据式(4)可计算得到电流基波幅值和相位等特征量。可以看到,电流每个状态量计算平均仅需两次加法和两次乘法,大大减少了运算量。

3 RTDS试验验证
结合某500 kV变电站200 kV双母双分段接线场合示范应用,通过RTDS 试验验证拓扑动态调整方法的限流效果以及控制系统的有效性。试验模型如图5所示,拓扑调整高速开关布置于1号分段和2号分段位置,替换原常规分段断路器,其中主变压器(以下简称为“主变”)容量3×750 MVA,1号主变连接Ⅰ母Ⅰ段,2号主变连接Ⅱ母Ⅰ段,3号主变连接Ⅰ母Ⅱ段。正常运行时,母联分段开关均处于闭合状态,系统合环运行,供电可靠性不受影响;分段电流之和过流后,作为拓扑动态调整元件的分段高速开关迅速动作,在故障区域常规断路器分闸前可靠开断,从而降低故障区域常规断路器开断短路电流水平。
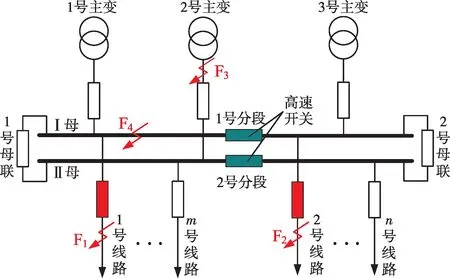
图5 220 kV双母双分段典型接线结构
图6展示了拓扑动态调整前,后流经各支路的短路电流。可以看出,拓扑调整前,线路出口F1点和F2点故障时流经相应线路断路器的短路电流最大达到了51.1 kA,超过所装设断路器的遮断容量;主变低压侧F3 点和母线F4 点故障时,对应断路器短路电流均在40 kA以下;两组分段高速开关解列后将Ⅰ段和Ⅱ段母线隔离,F1点和F2点故障时流经断路器的短路电流均有不同程度的降低,分别降至41.0 kA 和15.3 kA。由于故障时流经分段的短路电流仅由部分电源提供,其中F2故障时流经1 分段的最大短路电流仅为24.1 kA,远低于拓扑调整开关开断能力。
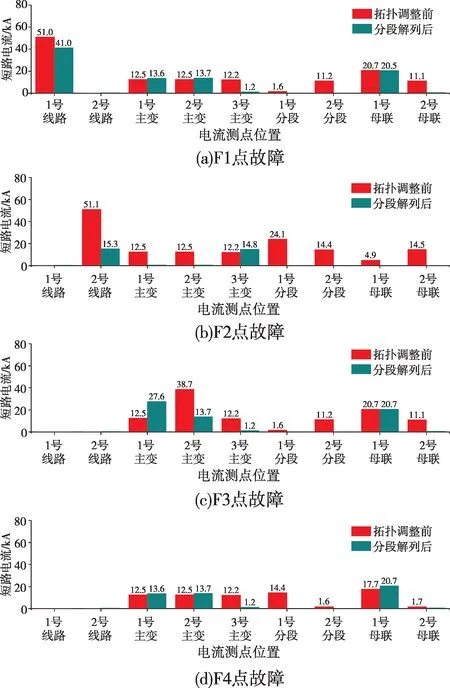
图6 拓扑动态调整前后流经各支路的短路电流
由于故障合闸相位随机发生,短路电流衰减直流分量不可预知,给定值整定带来困难。根据短路电流仿真波形,对比分析了全波傅氏算法、半波傅氏算法和卡尔曼状态估计算法3种故障识别算法的效果。图7给出了原始短路电流采样波形和3 种故障识别算法提取的短路电流交流分量幅值,其中短路电流首半波为小半波。可以看出:全波傅氏算法需要1个周波以上的时间才能计算出短路电流交流分量幅值,半波傅氏算法的响应时间有所减小,最小可以达到10 ms,但两种算法均无法消除衰减直流分量的影响,衰减直流分量越大,响应时间相应也越长。对于卡尔曼状态估计算法,计算结果不受衰减直流分量的影响,最大在3~5 ms之内即可递推求解出准确的短路电流交流分量幅值。
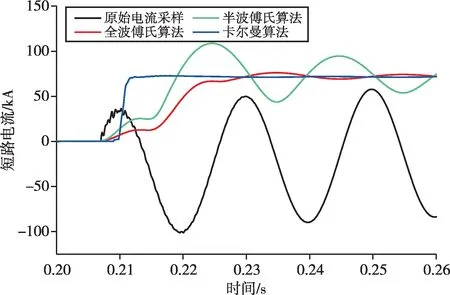
图7 短路电流及不同算法下的交流分量幅值波形
通过相控开断算法控制高速开关燃弧时间,考虑控制高速开关燃弧时间为5 ms,检测到相电流过流后控制装置根据预测的短路电流过零点和预设的燃弧时间计算等待延时,经过等待延时后分别发出三相出口信号,控制高速开关分闸。图8为三相故障时的短路电流和控制装置发出的三相高速开关动作出口信号。可以看出:从动作信号发出到实际短路电流开断之间的时间间隔分别为4.8 ms、4.9 ms、4.9 ms,即最大相控误差不超过0.2 ms,其中A相和B相首半波为大半波,高速开关在首半波过零点开断,C 相首半波为小半波且不足5 ms,因此需要等待至故障发生后20 ms时刻开断。此时若不采用相控开断算法,C 相高速开关将遭受长燃弧时间,对其可靠性和寿命会产生不利影响。
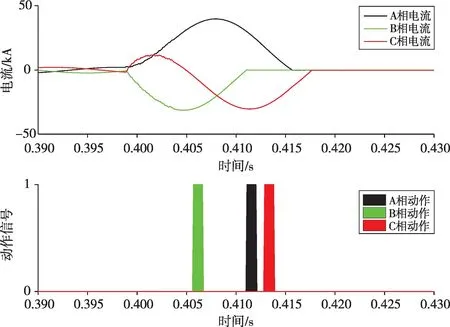
图8 三相短路电流及其动作信号
4 结语
1)针对母线分段接线本文提出了基于拓扑动态调整的短路电流抑制以及拓扑自动恢复方案。
2)针对拓扑动态调整方法的速动性约束,从控制回路的各个环节出发提出了高实时性控制技术方案,以及基于卡尔曼状态估计的故障快速识别和相控开断方法,有效提高了控制系统动作速度,减小了高速开关燃弧时间。
3)通过RTDS 试验验证了基于拓扑动态调整的限流方法以及控制系统速动性和相控开断算法的有效性。
4)基于拓扑动态调整的故障限流方法在实际双母双分段接线下的短路试验验证有待开展,同时本文所提的方法在线路等其他场合中的应用也有待进一步研究。