基于大数据的汽车动力电池状态评估综述*
2022-11-07姜华强潘垂宇李学达许楠
姜华强 潘垂宇 李学达 许楠
(1.吉林大学汽车仿真与控制国家重点实验室,长春 130022;2.中国第一汽车股份有限公司新能源开发院,长春 130013)
主题词:动力电池 数据驱动 大数据 状态估计
缩略词
BMS Battery Management System
SOC State of Charge
SOE State of Energy
SOH State of Health
SOP State of Power
SOT State of Temperature
SCT Static Capacity Test
HPPC Hybrid Pulse Power Characteristic
DST Dynamic Stress Test
RUL Remaining Useful Life
NN Neural Network
GA Genetic Algorithm
GPR Gaussian Process Regression
FL Fuzzy Logic
SVM Support Vector Machine
LSTM Long Short Term Memory
SVR Support Vector Regression
TDNN Time Delay Neural Network
UDDS Urban Dynamometer Driving Schedule
PSO Particle Swarm Optimization
ANN Artificial Neural Network
ICA Incremental Capacity Analysis
OCV Open Circuit Voltage
ELM Extreme Learning Machine
MAPE Maximum Average Error Percentage
RMSE Root Mean Square Error
RVM Relevance Vector Machine
1 前言
近年来,为了减少环境污染、缓解能源短缺,新能源汽车尤其是电动汽车在我国得到了迅猛发展。作为电动汽车的关键部件之一,锂离子电池对电动汽车的产业化和市场化至关重要[1]。然而,电动汽车的里程焦虑问题和电池寿命衰减问题阻碍了消费者的购买热情,需要一种更加先进、智能的电池管理系统(Battery Management System,BMS)实现对电池能量和状态的准确评估与管理,延长续驶里程和电池寿命。
制约电池管理技术发展的主要原因可归结为以下3点:
(1)锂离子电池的容量和寿命等状态是高度非线性的,具有多时间尺度和多空间尺度的老化特性,难以精确建模描述;
(2)电池的荷电状态、健康状态等无法直接测量并且很容易受到环境和测量噪声影响;
(3)单体电池的不一致性降低了电池组的工作效率,增大了电池组的控制难度。
因此,开发先进、智能的电池管理系统以解决上述问题已经成为了当前的研究热点[2]。
电池管理系统应具有准确估计和评估电池状态(State Of X,SOX)的功能,包括荷电状态(State Of Charge,SOC)、能量状态(State Of Energy,SOE)、健康状态(State Of Health,SOH)、功率状态(State Of Power,SOP)、温度状态(State Of Temperature,SOT)[3]。电池状态的估计是先进电池管理系统的关键功能,准确的状态估计可以保证电池使用过程中的可靠性,是电池系统优化和安全管理的基础[4]。因此,本文聚焦电池管理系统的状态评估功能,概述了电池状态估计和预测的方法,并且讨论了面临的挑战。
本文第2章分类介绍了电池状态估计的常用方法,指出了数据驱动方法的优势。第3章详细介绍了各类数据驱动算法在SOC、SOE、SOH、SOP、SOT估计中的研究现状。第4章为总结及其未来发展方向。
2 电池状态评估的常用方法
对电池进行准确的状态评估,可以提升电池的工作效率,延长使用寿命,增强老化性能,确保电动汽车安全可靠的运行使用。通常,可将SOX评估方法分为3类,即基于试验的方法、基于模型的方法和基于数据驱动的方法,本文主要关注基于数据驱动的方法[5-6]。图1展示了常见的电池状态评估方法。
2.1 基于试验的方法
基于试验的方法是一种相对简单的方法,它通过特定试验操作,建立电池特性参数(如阻抗谱、内阻、温度、开路电压等)与电池状态的映射关系实现电池状态评估。开路电压查表法常用于电池SOC的估计,但这种方法需要长时间静置电池,并且受电池老化影响较大[7]。安时积分法又称库伦计数法,常被用来估计电池的SOC,但这种方法会产生较大的累积误差,一般与其他方法联合使用以提高鲁棒性[8-9]。内阻和容量变化是电池老化的重要指标,基于阻抗谱测量的方法也常被用来评估电池的SOH和SOC[10]。此外,静态容量测试(Static Capacity Test,SCT)、混合脉冲功率特性(Hybrid Pulse Power Characteristic,HPPC)、动态应力测试(Dynamic Stress Test,DST)等测试方法也常用于电池工作特性和状态评估中。
2.2 基于模型的方法
基于模型的方法又被称为传统方法,在工程领域有着广泛的应用,解决了许多现实问题[11]。基于模型的方法需要从业者对电池系统和电池内部过程有着更加深入的理解,从而建立能准确模拟电池特性变化的数学模型[11-12]。然而,任何模型的建立和使用都存在理论和实践方面的问题,需要该领域专家花费大量时间深入研究[13-14]。
基于模型的方法可以划分为2个过程:一个是电池模型建立,另一个是算法实现[15]。目前常见的电池模型可分为:经验模型、电化学模型、等效电路模型和电化学阻抗模型[16-19]。其中,等效电路模型很好的权衡了模型复杂度和准确性之间的关系,在工程领域的实时应用中获得了较多关注。常见的等效电路模型有:Rint模型、n阶RC模型和Randels模型。Rint模型是最简单的等效电路电池模型,但是它没有考虑电池的极化和扩散现象[20]。n阶RC电路模型在Rint模型的基础上串联若干个并联的电容和电阻来代表电池的极化现象,模拟电池在充放电过程中的电压响应[21]。Randels模型在RC模型的基础上串联了一个电容Cω,也被称为韦伯原件,用来代表电池充电状态发生的扩散现象[22]。
在基于模型的电池状态估计方法中,卡尔曼滤波算法、粒子滤波算法、最小二乘法、粒子群算法被广泛用于电池SOC和电池SOH的评估。Liu等提出一种基于扩展卡尔曼滤波算法的电池SOC估计方法,达到了较好的效果[23]。Chen等提出一种基于粒子滤波算法的开路电压估计方法,实现了对电池SOC和剩余放电时间的良好预测[24]。Wang等考虑了温度变化和电流漂移噪声对磷酸铁锂电池SOC估计的影响,发现粒子滤波算法的效果优于扩展卡尔曼滤波[25]。Lai等发现序列扩展卡尔曼滤波算法估计电池的容量状态具有良好的准确性和稳定性[26]。Wei等采用卡尔曼滤波和递推最小二乘对电池SOC和容量进行了联合估计,使用向量型递推最小二乘法在线调整不同变化率的模型参数,该方法消耗很少的计算成本[27]。
2.3 数据驱动的方法
随着新能源汽车和大数据技术的快速发展,基于数据驱动的电池状态评估方法受到了学术界和工业界的广泛关注,我国新能源汽车大数据平台及相关技术标准的建立也为其提供很大的发展空间[28]。数据驱动方法又被称为黑盒模型,它不需要知道电池系统的大量技术细节,极大地缩短了开发时间[29-30]。相比于基于模型的方法,数据驱动方法不需要深入的行业知识和复杂的数学模型,只需要大量的数据和较高的计算能力。如果有足够的电池数据,数据驱动的方法可以达到出色的性能,对噪声、温度、老化以及初始误差的不确定性均有较好的适应性。然而,数据驱动方法严重依赖电池数据的质量,容易出现欠拟合和过拟合现象,并且训练时间较长[31-32]。
数据驱动的方法将电池视为黑盒,通过大量输入和输出数据学习电池内部的动态过程,神经网络(Neural Network,NN)、模糊逻辑(Fuzzy Logic,FL)、遗传算法(Genetic Algorithm,GA)、高斯过程回归(Gaussian Process Regression,GPR)、支持向量机(Support Vector Machine,SVM)等方法被广泛用于这方面的研究。Chemal等使用深度前馈神经网络直接将测量值映射到电池SOC的估计,在较大环境温度的变化下获得了良好的准确性,平均绝对误差小于2%[33]。Hu等使用基于遗传算法的模糊C均值方法学习模糊规则的拓扑结构和先行参数,并用BP神经网络对先行和后验参数进行优化,SOC估计结果的RMSE小于1.68%[34]。Liu等采用经验模态分解把电池容量数据分解为固定模态函数和残差,并用GPR拟合不同确定性的固定模态函数,长短期记忆网络(Long Short Term Memory,LSTM)用来估计残差,结果表明这种LSTM+GPR方法优于其他同类方法[35]。Zhao等使用等效充电电压差分值和等效放电电压差分值作为可实时测量的电池健康指数,使用支持向量回归(Support Vector Regression,SVR)模型建立健康指标和电池容量的关系,对SOH和RUL实现了可靠预测[36]。
以上3种方法在实际应用中都遇到了一定的困难,相信随着电池和大数据技术的进步这些问题可以被妥善的解决。随着新能源汽车在我国的推广和普及,车辆运行产生的海量数据为数据驱动的方法提供了广阔的发展空间,越来越多的学者关注数据驱动的电池状态评估方法。3种方法的优缺点如表1所示。
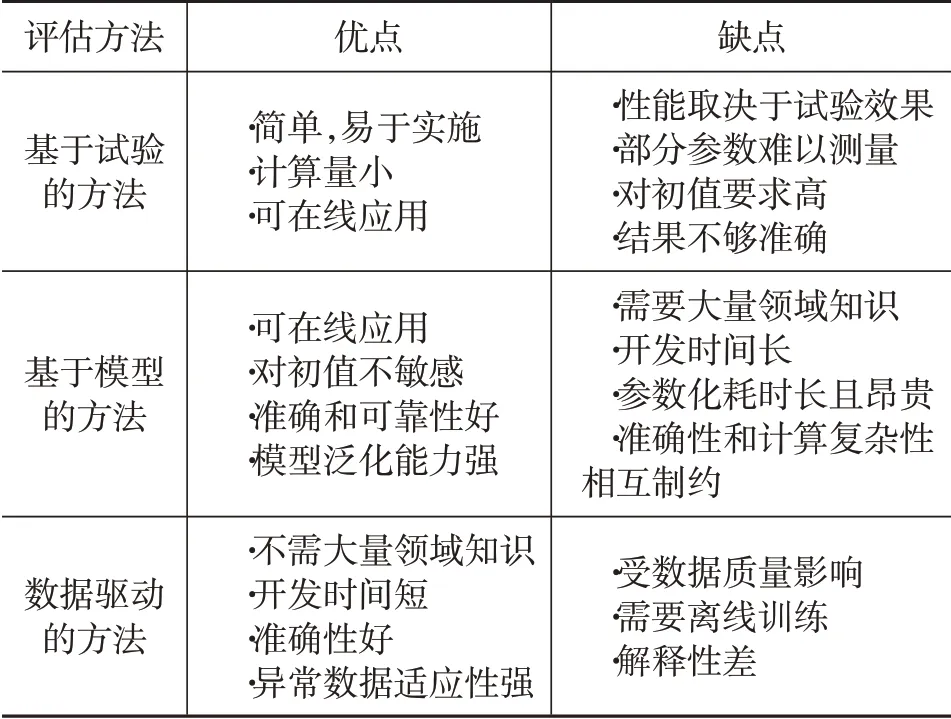
表1 电池状态评估方法比较
3 数据驱动的电池状态评估
数据驱动方法无需考虑电池内部复杂的化学反应,只需要大量输入和输出数据学习电池的内部动态,极大地缩短了电池状态评估方法的开发周期。近年来,大量的研究集中于用数据驱动的方法提高电池
状态评估的性能。本文回顾了数据驱动方法在电池SOC、SOE、SOH、SOP、SOT方面的研究和应用。
3.1 数据驱动的电池SOC估计
出于不同的研究目的,电池SOC具有多种形式和定义[37],其中被较多采用的定义是:电池的SOC为电池剩余电量与电池总电量的比值[38],如公式(1)所示。
式中,Cremain为当前剩余电量;Ctotal为总电量。
尽管公式(1)的表达很简单,但由于电池SOC不能直接测量,只能通过估计的方式得到,并且在实际应用中电池的容量受温度、电流、老化等多种因素的影响,这给电池SOC的高精度估计带来了很大困难[11]。而数据驱动的方法将电池内部复杂的化学反应视为一个黑盒,对上述因素表现了良好的适应性。常用于数据驱动的电池SOC估计方法主要有:神经网络、遗传算法、支持向量机、高斯过程回归以及联合算法。
3.1.1 基于神经网络的SOC估计
车用锂离子电池是一个强非线性系统,而神经网络对非线性系统有很强的拟合能力,因此神经网络被大量用于电池的状态估计。Ma等使用LSTM深度神经网络估计电池SOC,US06和LA92行驶工况数据用来作为模型训练集,NN和城市道路工况(Urban Dynamometer Driving Schedule,UDDS)行驶工况数据作为测试集验证模型的性能,在考虑噪声的条件下,该方法的准确性达到了98.68%[39]。Hossain等提出使用基于时间延迟的神经网络(Time Delay Neural Network,TDNN)算法估计电池SOC,TDNN的参数通过改进的萤火虫优化算法确定,不考虑噪声和老化误差的均方根值小于1%[40]。Yang等使用一种带有门控单元的循环神经网络估算电池SOC,与传统前馈神经网络相比,这种神经网络可以保留先前的SOC和电压、电流、温度等输入信息,产生更好的估计精度[41]。神经网络估计电池状态的示意如图2。
3.1.2 基于高斯过程回归的SOC估计
由于测量噪声和输入异常值,数据驱动的方法的
SOC估计值通常不是平滑的曲线。为了解决这个问题,高斯过程回归用来量化这种估计的不确定性的同时提供估计值。Xiao等使用带有门控循环单元的GPR模型预估电池SOC,这种方法以概率分布的形式提供估计结果,对噪声、初始误差、异常值表现出了良好的鲁棒性[42]。Chen等使用GPR离线学习电池试验数据集,并用无迹卡尔曼滤波算法校正电压误差提高估算精度,结果表明这种方法在各种驾驶循环、温度和老化条件下达到了较好的效果[43]。Deng等使用基于数据驱动的GPR算法估计电池组的SOC,分别使用皮尔逊相关系数和主成分分析筛选输入特征和降低数据冗余,结果表明这种使用平方指数核函数的自回归GPR模型优于常规GPR模型,估计误差小于3%[44]。
3.1.3 基于支持向量机的SOC估计
支持向量机是一类重要的有监督机器学习方法,常被用来解决分类和回归问题[45]。电池SOC的预测可以被视为回归问题[46],因此部分学者使用SVR估计电池SOC。Li等使用SVR模型对锂离子电池SOC进行估计,并使用粒子群算法(Particle Swarm Optimization,PSO)优化SVR的参数,模型的交叉验证结果表明该模型有良好的泛化能力[47]。Hu等使用双重优化搜索的SVR估计电池SOC,ADVISOR仿真试验表明,SVR方法相比人工神经网络(Artificial Neural Network,ANN)能更加简单准确的完成估计[48]。
3.1.4 基于遗传算法和联合算法的SOC估计
此外,遗传算法和联合算法也常被用于电池SOC估计。遗传算法具有可扩展性,易与其它方法混合使用,常被用于优化模型参数。例如,Chen等使用灰色预测模型和遗传算法估计电池SOC,遗传算法优化了灰色预测模型的参数,使其具有更高准确性和推广能力[49]。遗传算法的算法流程图如图3所示。
部分学者着眼于各种算法的优点,将他们联合使用,以达到良好的估计效果。Zhang等联合使用库伦计数法和GPR提出一种数据驱动的电池SOC估计方法[50]。具体做法是:使用增量容量分析(Incremental Capacity Analysis,ICA)校正初始SOC,然后通过最大信息效率分析提取4个电压值作为GPR模型的训练输入,完成对实际容量的估计。快速容量衰减试验表明这种方法有较好的鲁棒性和估计精度。Song等联合使用最小二乘支持向量机(Least Square-SVM,LS-SVM)算法和无迹粒子滤波器实现了考虑电池老化的SOC估计,LS-SVM通过可测量的电流和端电压输入估计电池SOC,无迹粒子滤波器用来优化估计值,试验表明在电池生命周期内均方根误差小于1.8%[30]。
3.2 数据驱动的电池SOE估计
电池能量状态(SOE)的概念与SOC非常相似,不同之处在于SOC表征电池的剩余安时容量,SOE表征电池剩余的能量容量。SOE的概念由Mamadou[51]提出,定义如公式(2)所示:
式中,α取值0~1;Enom为电池的额定能量。
对于SOE的估计,数据驱动方法是最为常用的方法之一。Ma等使用LSTM深度神经网络同时估计电池SOC和SOE,通过2个动态循环验证了不同工作条件下的算法性能,在固定温度下SOE的绝对平均误差小于1.09%[39]。He等提出一种基于高斯模型的电池SOE估计方法。该方法使用面向统计特性的高斯模型模拟不同电池的开路电压(Open Circuit Voltage,OCV)特性,使用遗传算法优化参数,中心差分卡尔曼滤波器用来实时估计电池SOE。结果表明该方法对LiFPO4和LiMn2O4电池有良好的适用性,最大估计误差均小于1%[52]。Wang等使用滑动窗口神经网络拟合端电压和模型输入之间的关系,进而实现对电池SOE的估计,估计误差在2.5%以内[4]。
3.3 数据驱动的电池SOP估计
电池的SOP一般是指电池在短时间内提供或吸收的最大功率[53],它反映了电池对外界工况变化的适应能力。新能源汽车的驱动、制动和能量管理均受到电池SOP的约束。一方面,新能源汽车尤其是纯电动汽车的加速策略,要考虑电池的SOP以免过放;另一方面,新能源汽车的制动能量回收策略也需要电池SOP信息协调再生制动和机械制动。此外,混合动力汽车还需要电池SOP信息完成功率分配,SOP对车辆的性能有重要意义。SOP的计算如公式(3)。
式中,Ik+1:k+p表示从第k+1步到k+p步的电流测量值;Vk+p表示当前电压测量值。
由于数据驱动方法强大的学习能力,部分学者结合传统估计方法和数据驱动方法,取得了更好的效果。Tang等开发了一种等效电流测试方法将脉冲测试电流峰值降低了33%,然后使用Softmax神经网络预测电池SOP,误差在0.5%以内[53]。Tang等还提出了一种基于模型的极限学习机(Extreme Learning Machine,ELM),该方法通过将ELM中的激活函数替换为等效子模型,仅使用电流信息就可预测未来电压、功率和温度[54]。Fleischer等开发了一种自适应神经模糊推理系统对锂离子电池的电压进行预测,进而预测电池SOP。这种方法同时具有模糊逻辑和神经网络的优点,对老化有较好的适应性[55]。
3.4 数据驱动的电池SOH估计
尽管锂离子电池有比能量高、自放电小、循环寿命长的显著优点,但是随着其循环次数增加,其容量会逐渐衰减,在实际使用中产生一系列问题[56]。因此,必须对其容量进行准确估计,以免发生过充和过放对电池造成不可逆的损害。为了避免这种现象的发生,SOH被用作电池容量衰减的关键指标[57]。电池的SOH可用电池性能参数进行定义,一般有容量和内阻2种定义方式。
(1)从容量角度定义
式中,Cage为电池当前容量;Crated为电池额定容量。
(2)从内阻角度定义SOH:
式中,R为当前状态下的内阻;R0为出厂时的内阻。
近年来,大数据和人工智能技术领域取得了显著进展,大量学者采用数据驱动的方法提高电池SOH的估算精度。目前,电池SOH的数据驱动方法主要有神经网络、高斯过程回归、支持向量机和相关向量机。
3.4.1 基于神经网络的SOH估计
神经网络具有很强的非线性拟合和模型泛化能力,在电池SOH预测方面得到了广泛研究。Shen等提出一种基于深度学习的估计方法,这种结合了迁移学习和集成学习的概念,使用相对较小的训练集实现了对电池SOH的在线估计[58]。Chang等提出一种融合了遗传算法和小波神经网络的在线估计方法,皮尔逊相关系数用来提取特征变量,遗传算法用于优化小波神经网络参数。试验结果表明,SOH的误差估计结果小于3%[59]。Li等使用一种深度LSTM神经网络在线估计电池SOH,该方法对噪声和异常值有良好的鲁棒性,平均绝对误差百分比(Maximum Average Error Percentage,MAPE)为2.08%[60]。为应对电池的高非线性行为,Khaleghi等开发了一种非线性自回归神经网络,该方法不需要复杂的数据处理,仅需在线电压数据便可达到较好的SOH估计结果[61]。
3.4.2 基于高斯过程回归的SOH估计
高斯过程回归是一种贝叶斯非参数机器学习方法,对于复杂模型的不确定性有很强的处理能力,对电池SOH的估算表现出良好的性能。Richardson等使用高斯过程回归估计电池容量,该方法通过使用短时间恒流工况的电压测量值估计电池SOH,在特定电压范围内,只需要10 s左右的恒流运行便可完成容量估计,均方根误差(Root Mean Square Error,RMSE)在2%~3%[62]。Liu等提出一种自动相关性确定内核的高斯过程回归方法预测电池的日历老化,这种GPR模型具有良好的准确性和泛化能力,对于多步预测测试和加速老化测试也表现出了良好的效果[63]。Sheng等提出一种新的加权高斯过程回归方法估计SOH,该方法通过知识转移减少对数据的依赖,并引入平方指数协方差函数和惩罚机制控制知识转移过程。试验结果表明,该方法使用少量训练数据(总数据集的20%)就获得了可靠的预测结果[64]。
3.4.3 基于支持向量机的SOH估计
SVM是一类重要的机器学习方法,可以普遍的将多元函数极值逼近到任何精度水平,部分学者用它学习健康指标和电池SOH之间的映射关系。Zhang等使用一种基于LS-LSTM的误差补偿模型来估计电池SOH,该方法融合了经验退化模型和数据驱动方法,将电池老化分为整体趋势和局部差异,测试结果表明该方法有良好的预测精度和鲁棒性[65]。Xiong等提出一种基于加权的LS-LSTM对梯次利用电池进行SOH估计,该方法通过皮尔逊相关系数提取电池健康指标作为模型输入。电池不同老化路径和水平结果表明,这种方法有良好的鲁棒性和在线估计准确性[66]。
3.4.4 基于相关向量机的SOH估计
与SVM相比,相关向量机(Relevance Vector Machine,RVM)能给出预测结果的不确定性表达,并且降低核函数的计算量。Achmad等将电压样本熵作为模型的输入,将估计的SOH作为输出,对比了RVM和SVM预测电池剩余使用寿命的准确性,发现RVM具有更好的预测精度[67]。Yang等使用放电过程中的电压和温度变化信号,使用粒子群算法优化结合高斯和sigmoid函数的多核向量机参数,达到了更加准确的预测精度[68]。Li等开发了一种基于平均熵值和RVM的多步超前预测模型。该方法使用小波去噪,然后使用平均熵方法确定最佳嵌入维度,最后使用相关向量机预测电池SOH,取得了良好的效果[69]。
3.5 数据驱动的电池SOT估计
电池温度状态估计是电池热管理的关键任务之一,不仅关系到电池的性能寿命,还与电池安全密切相关。不当的SOT估计不仅会使电池寿命锐减,甚至还会引发自燃事故,带来极大的财产安全损失。电池的表面温度可以通过热电偶等温度传感器较为方便地测得,但是电池的内部温度由于成本和安全因素难以直接获得,常采用估计的方式得到。
数据驱动方法与其他方法联合使用,可以获得良好的SOT估计效果。Feng等提出一种电化学-热-神经网络模型实现了对电池SOC和SOT的协同估计,达到了较好的效果。具体来说,该方法使用单粒子模型和集总热模型作为神经网络子模型,然后将无迹卡尔曼滤波器与神经网络结合,实现可靠的SOC-SOT协同估计[70]。Liu等开发一种结合卡尔曼滤波的RBF神经网络来估计锂离子电池的内部温度,这种方法以电池集总热模型作为状态函数,使用扩展卡尔曼滤波滤除RBF神经网络异常值,减少估计误差,各种测试条件下的最大误差为0.25℃[71]。Kopp等将温度传感器放置在电池包装中,使用一种“人工特征提取”的方法提高多种LSTM架构的神经网络系统预测精度[72]。
4 结论与展望
电池状态的准确估计不仅关乎到电池的性能表现和使用寿命,更与电动汽车的安全性密切相关,我国新能源汽车的全面推广离不开相关技术的进步。尽管国内外学者在数据驱动的电池状态评估领域进行了大量研究,但仍存在许多问题有待解决。数据驱动的电池状态评估方法在协同状态估计、联合云计算、电池组状态估计有一定的发展前景。
目前电池单状态估计的方法非常丰富,但是协同状态估计方法的研究还存在不足。部分学者尝试利用已知状态信息估算其他状态,形成了多状态协同估计方法,达到了更好的效果。此外,结合云计算和车联网的在线学习数据驱动方法也受到了广泛关注,具有广阔的发展空间。在车联网环境下,云端可承担绝大部分的模型训练任务,通过OTA技术实现对电池状态评估模型的不断迭代,最终达到良好的性能。最后,如何在电池组层面准确估计电池状态困扰了众多电池从业者。电池组内单体之间的不均衡和特性差异给以往基于单体的电池状态估计方法带来了很大困难,如何在电池组级别上准确估计电池状态的评估方法将是未来研究的一个重点。
本文分类介绍了近年来汽车动力电池状态评估的方法和成果,并对各种方法的优缺点进行了比较,其中数据驱动方法是本文论述的重点。随着汽车大数据平台的建立和新能源汽车的推广普及,车辆的实时运行数据的获取变得极为方便。然而如何充分利用和挖掘海量运行数据包含的电池SOC、SOH、SOT等信息,并将其用于动力电池的状态估计和BMS系统设计中是汽车动力电池技术从业者应该关注的问题。
