风电机组能效分析及优化研究
2022-11-07刘保松张乐平许新瑞
刘保松,张 伟,张乐平,许新瑞
(华电电力科学研究院有限公司,杭州 310030)
全球气候变化严重影响到人类生存环境,在此背景下,风电作为清洁的可再生能源,受到了世界各国的高度重视并得到快速发展,截至2020年底,我国风电装机规模达2.81亿kW。但由于工期紧、规模大等原因,导致风电机组投运后存在能效偏低、发电效益差等问题,因此如何提升风电机组能效对促进风电行业发展具有重要的影响。
1 风电机组能效分析
1.1 风电机组功率曲线分析
将SCADA秒级数据的风速、功率,计筛除异常数据后,采用标准GB/T 18451.2—2021《风力发电机组功率特性测试》中的方法,将风速按1 m/s划分区间,根据下式对每一风速区间的风速平均值和输出功率平均值。

式中:Vi为第i个区间的平均风速,m/s;Vn,i,j为第i个区间内第j个数组的风速,m/s;Pi为第i个区间的平均功率,kW;Pn,i,j为第i个区间内第j个数组的功率,kW;Ni为第i个区间内10 min平均数据的数组个数。
根据风场提供的8台风电机的SCADA历史运行数据等资料,对风电机组运行数据进行信息挖掘和处理,根据合同及相关标准,对风电机组功率曲线一致性进行分析。
由图1可见,在低于12 m/s的风速段,各风机的功率曲线均低于保证功率曲线。由此判断风机能效未能充分发挥,风机控制存在一定的问题(偏航系统、变桨系统、变流器性能及控制策略存在问题)。

图1 各风机功率曲线
1.2 偏航性能分析
以风向与机舱位置的夹角——错风角为评估风电机组偏航性能的指标。通过对错风角-功率图的对比分析,可以对全场风电机组偏航性能评估。将各风机正常并网状态下进行错风角分区间,为-14~-10°、-10~-6°、-6~-2°、-2~2°、2~6°、6~10°及10~14°,求取各错风角区间的功率平均值,其中错风角为0°表示正对风,此时功率平均值高于其他错风角区间功率平均值,表示风机的对风效果好。
从图2中可以发现,无论调整前后,均有部分机组的平均功率最高值未落在-2~2°区间内。风机在2~6°或者-6~-2°区间内,偏航对风有一定的误差。

图2 各机组功率与错风角趋势图
1.3 变桨性能分析
1.3.1 分析风机是否存在提前变桨情况
选取本风场功率曲线一致性较好#4风机与功率曲线一致性较差的#7、#8风机进行以下分析。通过对机组SCADA数据进行处理,得到相应功率-桨距角变化图,分析风机是否存在提前变桨、3支桨叶是否同步等问题,从而对风电机组变桨性能进行评估。
由图3可见,#7、#8风机在1 150 kW左右就开始变桨,存在一定程度的提前变桨,可能对机组出力造成影响。进一步分析风速-桨距角,对比机组相同风速下的平均桨距角,分析机组是否通过风速来控制变桨。
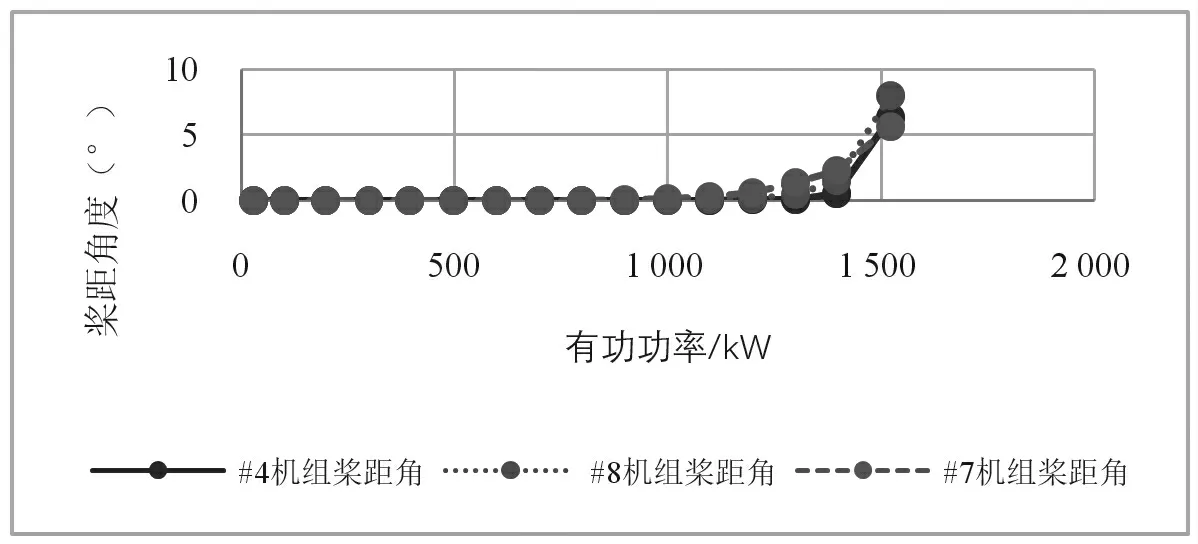
图3 风机桨距角-功率曲线图
1.3.2 分析风机是否存在桨距角不一致情况
分析#7风机桨距角随时间变化情况,对风机的3个桨距角随时间变化趋势作图。
由图4可知,3个桨距角随时间变化时完全重合,认为#7机组桨距角之间不存在偏差。
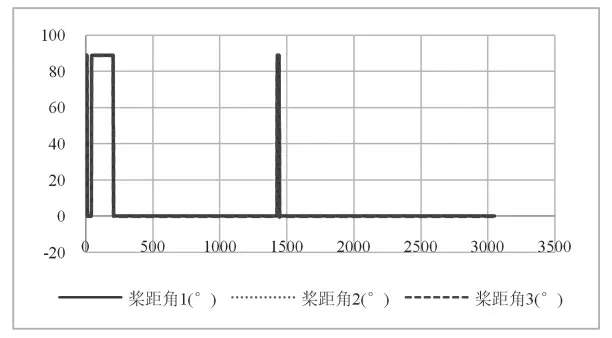
图4 #7风机桨距角-时间曲线图
1.4 控制参数分析
(1)分析风机转速-功率设定是否合理。剔除机组的限功率数据后,计算各转速段的功率平均值,对比分析相同转速下的功率值。
由图5可见,在相同转速下,不同风机有功功率几乎完全一致,判断为功率与转速参数调整得较好,控制稳定。
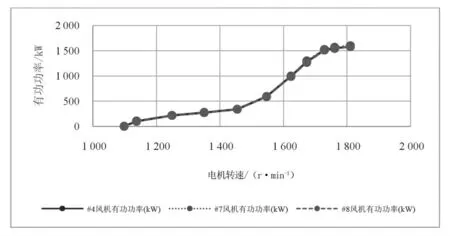
图5 风机有功功率-电机转速曲线图
(2)分析转速-转矩设定是否合理。剔除限功率数据后,分析风机的转速-转矩散点分布图,查看各阶段的控制策略是否稳定及风机的控制参数设定。
由图6可见,在相同转速下,3台风机转速-转矩控制特性相近,#7风机在高转速情况下转矩分布更散,控制稳定性较弱。根据散点图所示,在额定风速以下,扭矩变化率较低,在满发前的过渡段,转速-转矩散点离散度较大,说明转速-转矩匹配关系不稳定,控制参数设置不够合理。

图6 风机转矩-转速散点图
1.5 叶尖速比分析
分析风机的最佳叶尖速比追踪控制。剔除风机的限功率数据后,分析风机在各个风速下的叶尖速比散点图,判断风机的最佳叶尖速比追踪控制是否稳定,不同风机之间是否存在偏差。
由图7可以看出,#8风机在5~8 m/s风速区间内,风速-叶尖速比数据分布较散,表明在最佳叶尖速比追踪段存在控制不稳定的问题。
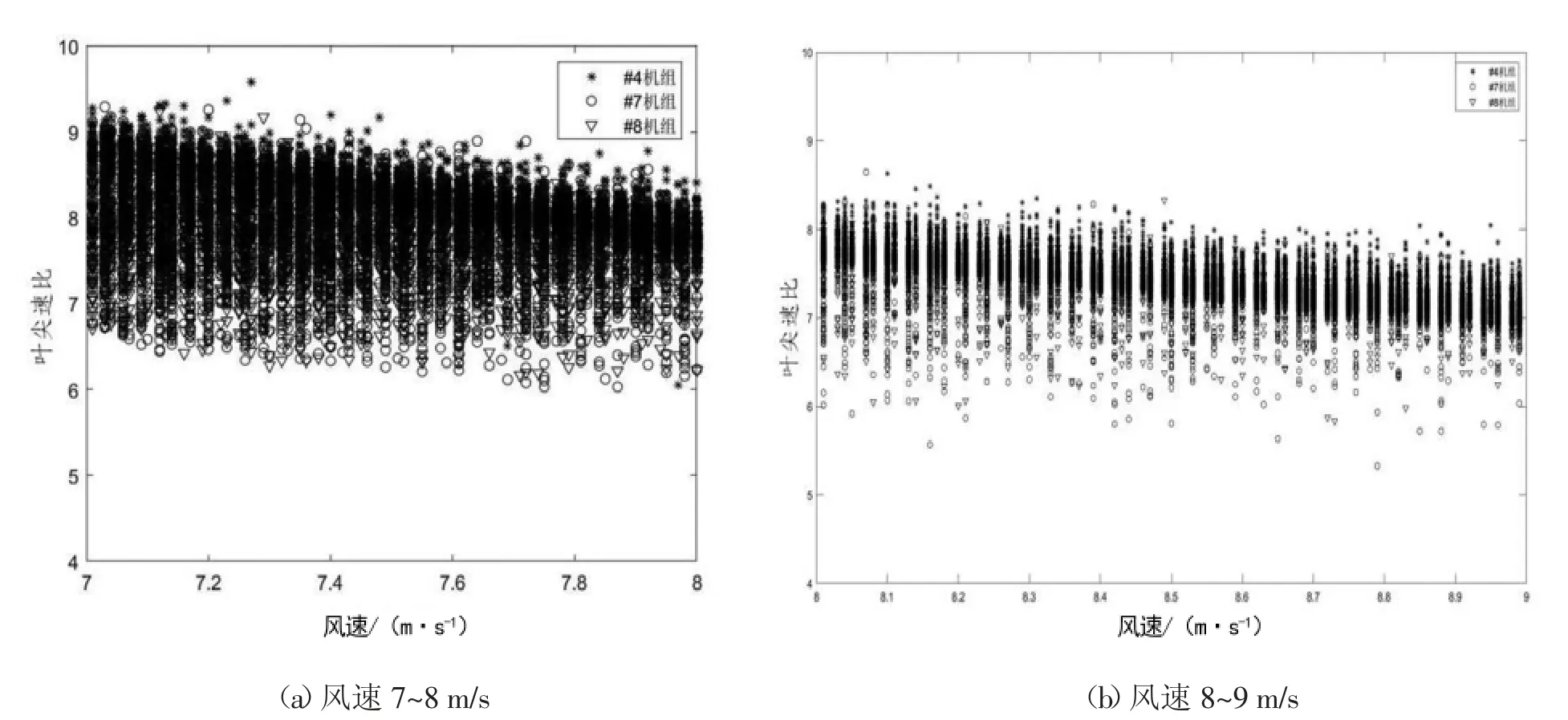
图7 风机叶尖速比-风速散点图
2 结论与建议
通过以上分析,该风场存在的主要问题为:①各风机的实际曲线均低于保证功率曲线;②除#6风机外,其余风机错风角在2~6°或者-6~-2°区间内,偏航对风存在一定的误差;③#7、#8机组在1 150 kW左右就开始变桨,存在一定程度的提前变桨;且该机型是依据风速来作为桨距角控制的启动条件,影响风机变桨控制性能;④在满发前的过渡段,转速-转矩散点离散度较大,说明转速-转矩匹配关系不稳定,控制参数设置不够合理;⑤最佳叶尖速比追踪段存在控制不稳定等问题,从而导致该风场能效偏低。针对上述问题,提出以下建议。
2.1 叶片零位校正
根据能效分析结果,发现不同风机之间的功率曲线差异较大。当叶片零位存在偏差时,影响叶片的翼型,导致叶片的气动性能下降,从而风机吸收的风能偏低,因此建议对各风机开展叶片零位校正工作。
通过手动变桨操作,调整叶片0位刻度线与变桨轴承0位刻度线对齐,登入控制系统修正叶片桨距角。
2.2 双PI及智能算法优化
目前风机采用的控制方法是查表法,由主控程序中给定的静态转速-转矩表进行控制。查表法较容易实现,但控制响应慢,控制精度较低。在风频变化较大时,容易产生偏差,并引起风机的振动。
双PI控制:在并网转速和额定转速附近采用PI控制,并网转速和额定转速之间采用跟踪最佳尖速比控制的控制策略,能够实现风能的转换效率最大化,使风电机组能够最大程度地吸收风能,从而优化风机的功率曲线和提升风机的发电量。
采用双PI控制方法后,主控PLC软件功率控制功能块采用了转矩控制和变桨控制相耦合的方式。在风速远小于额定风速以下时,通过转矩控制以维持最佳叶尖速比,以追求最大风能利用系数;在额定风速以上拐点处,如果风速波动很大,就要通过适当的变桨来实现平滑的过渡。在额定风速以上阶段,变速和变桨控制器也是同时发挥作用,通过变速即控制发电机的转矩,使其恒定,从而恒定功率。通过变桨来调整发电机的转速,使得其始终跟踪转速设置点。实际上,变速变桨通过简单的PI控制器(如查表法)就可以实现,但是额定风速以上风机系统模型的强烈非线性使得控制器参数选择比较困难,需要特别设计。变速、变桨2个控制器是同时运行的,为了使其耦合在一起,当在远远超过额定风速或以下时使其中一个或另一个控制环饱和。因此,在大多数时间里还是只有一个控制器处于激活状态,但是在接近额定点时其可以建设性地相互作用。
2.3 变桨控制优化
(1)在功率输出环节,转矩给定中增加传动链阻尼,减小传动链震荡;变桨角度控制环节,添加非线性变桨动作,防止大阵风时候的过速情况,延长风机寿命。
(2)风速桨距角控制策略。多台风机在未到额定功率时,变桨过早动作,使风机额定风速变大,可考虑调整控制策略,取消根据风速大小给定桨距角的控制方法,采用双PI进行转矩及桨距角的控制。
本文通过SCADA数据详细分析了偏航、变桨等控制性能,分析风电机组能效偏低的原因,并给出了针对性优化方案,实际应用过程中还应结合技改成本及效益进行选择。
