多旋翼无人机电机减振加固结构设计
2022-11-07齐亨通
臧 渊,齐亨通,周 洁*
(1.江苏大学无锡机电学院,江苏 无锡 214121;2.无锡职业技术学院,江苏 无锡 214121)
随着无人机技术的快速发展,无刷电机以其稳定性高、调速性能好等优势,迅速在多旋翼无人机领域占据重要地位[1]。无人机领域的崛起使得遥控航模市场的定制化需求、多种类的配套产品层出不穷。
外转子无刷电机常用于航模驱动,外转子的设计可以缩减电机尺寸,满足无人机的轻量化需求,较大的磁通量使得电机带负载能力强[2],适用于无人机高速飞行场合。然而随着功率密度的提高,电机振动的问题日益显现。电机振动可由机械、电磁等因素引起,转子和轴承的不平衡会产生机械振动[3],电磁振动则主要由径向电磁力波导致[4]。外转子无刷电机多采用精密轴承,优良的动态平衡性能使得机械振动量较小。因此,如何削减低阶径向激振力波,进而改善电机运行时产生的振动,成为了工程学领域的研究热点。
文献[5]使用线性模型仿真永磁同步电机的工作环境,定量分析得出机械振动和噪声振动,以减缓电机振动和减少噪声为目标设计一种的电机结构改善方案;为改善无刷电机的运行性能,文献[6]提出一种双圈磁钢结构,内外双圈的结构形成新的磁路,增加径向气隙磁密,从而提升力矩输出性能的设计方案;文献[7]作者通过切削电机底座材料、调整重心分布的方法,优化定子的电磁方案,以满足工程实践中改善电机振动的需求。
通过上述研究结论,本文设计一种基于多旋翼无人机的无刷电机固定结构,将传统的电机底座结构改进为一体化设计,大幅削减无人机飞行时机身的振动幅度,有效提高无人机的隐身性能,在多旋翼、穿越机和特种飞行设备的性能提高具有广阔应用前景。
1 电机振动分析
1.1 机械振动导致固定弱化
传统的多旋翼固定底座在电机运行时容易产生大量噪声,且螺栓紧固程度的差异会导致电机产生偏心力,加剧无刷电机与固定底座之间的磨损。需对固定底座做大量减振处理,即使能够通过无人机飞行控制系统进行调节,也无法满足高强度的飞行作业要求。无刷电机高速运动时定子会产生机械振动,振动波传导至电机底座释放大量的机械能。
现有的电机固定底座方案多为四枚螺栓环绕底板圆周、对称分布的紧固结构,如图1所示,原有结构装配繁琐,且多次拆装会弱化紧固效果。固定底座承载电机运行时产生的诸多外力,其结构对多旋翼的飞行性能具有巨大影响,若电机固定底座安装不当,超负荷运行,振动频繁,使得定子销钉松动后发生倾斜,定转子间产生轴心偏移,带动电机底板和机翼出现摩擦,钢材在反复交变荷载作用下,应力远低于极限强度[8],产生金属疲劳。

图1 四螺栓固定底座方案
航模电机常需工作在25 000 r/min以上的工作环境。螺栓松动会影响电机的平衡性,长此以往,电机与机身产生高频振动,如果机翼出现瑕疵或者凹痕,无人机的机身强度和运行稳定性都会大幅降低,导致飞行事故和无人机损毁。
对于目前普遍采用的电机固定底座方案,其四枚螺栓的固定承载大量力矩,松开螺栓接头需要力矩M,其是一种与螺母、螺杆、螺纹扭矩均有密切联系的组合量[8],其公式为
当螺纹扭矩MTP大于保持力矩MK+MG时,力矩M为负值,螺栓就会发生旋转自松。实际上,螺栓同样会受到振动波的影响,导致受力漂移和预载的自发降低。
1.2 电磁振动
随着功率密度的增大和弱刚性材料在电机结构设计中的运用,电磁振动也成为了微型电机需要考虑的问题。若线圈绕组提供三相正弦波交流电信号,磁场谐波产生的电磁力相互作用,在定子和转子上产生较强的电磁振动[3],振动频率近似与2倍电源工频(100 Hz)[4]重合产生大量噪声,振动传导至机座和机翼,对无人机的飞行造成干扰。
无刷电机在理想状态下的气隙磁密为

式中:λ(θ,t)为气隙磁导;f(θ,t)为磁动势。
选取定子开槽、外转子光滑的无刷电机进行分析,此时气隙磁导公式[9]可列写为

式中:∧0为恒定系数;λk1为转子光滑、定子开槽时的谐波磁导。
由麦克斯韦公式可知,磁场气隙中产生的径向电磁力[9]为
式中:pn(θ,t)为径向力波;b(θ,t)为气隙磁密;μ0为空气磁导率。
可知低阶径向激振力波与电机低阶固有频率产生大幅度电磁共振,由气隙磁场谐波产生的电磁力波相互作用,这是电磁振动的理论来源[3]。
2 多旋翼新型固定底座设计
为解决机械振动等问题,提供以一体化工艺成型的新型电机固定结构,螺栓贯穿定子的轴心,在电机和底座之间填充弹性材料,可有效减少电机与底座之间的振动加速度、减小噪声辐射,提高飞行控制下系统的工作效率,适用于多种型号电机的快速安装、拆卸和调试需求,并解决传统底座安装偏差产生的振动等问题。
2.1 定子及线圈绕组设计
定子铁心采用矽钢冲压设计,矽钢组成的定子铁心是电机磁路的重要组成部分,可提供效率更高的主磁场,减少涡流和磁滞损耗,可适用于目前无人机领域的多种外转子电机型号。轭部安装在定子支撑上以减少电磁振动带来的干扰。与外转子电机配套,系统形成包括定子铁心在内,以绝缘槽和轴承组成的装配体,绝缘槽从定子的轭部向外拓展,环绕四周支撑起铁心的齿部,定子铁心的齿部均匀固定于轭部外圈,线圈绕制于绝缘槽表面,制成后将外转子套装在定子外部,如图2所示。

图2 外转子无刷电机新型固定结构设计
本设计使轮毂电机绕组端部的高度变小,电机的结构更加紧凑,降低无刷电子定子铁心的重心分布。采用本设计的外转子型轮毂电机具有重量更轻、体积更小和生产效率提升等优势,为高速电机的工艺参数提升和批量化生产提供便利,适用于对电机体积和重量有严格要求的无人机、吹风机和工业AGV小车等领域。
2.2 加强机座与固定结构
考虑外转子无刷电机的结构,本设计采用同轴结构一体化加工成形构成轴承和机架的支撑结构,与自紧螺母配合。如图3所示,机座设计有主体和固定销2部分,机座主体贯穿碳纤维或其他材料的底板的两侧,下部安装有固定销,3支固定销呈120°分布贯入底板;自紧螺母将电机底座与多旋翼机身相互啮合,加强结构强度。
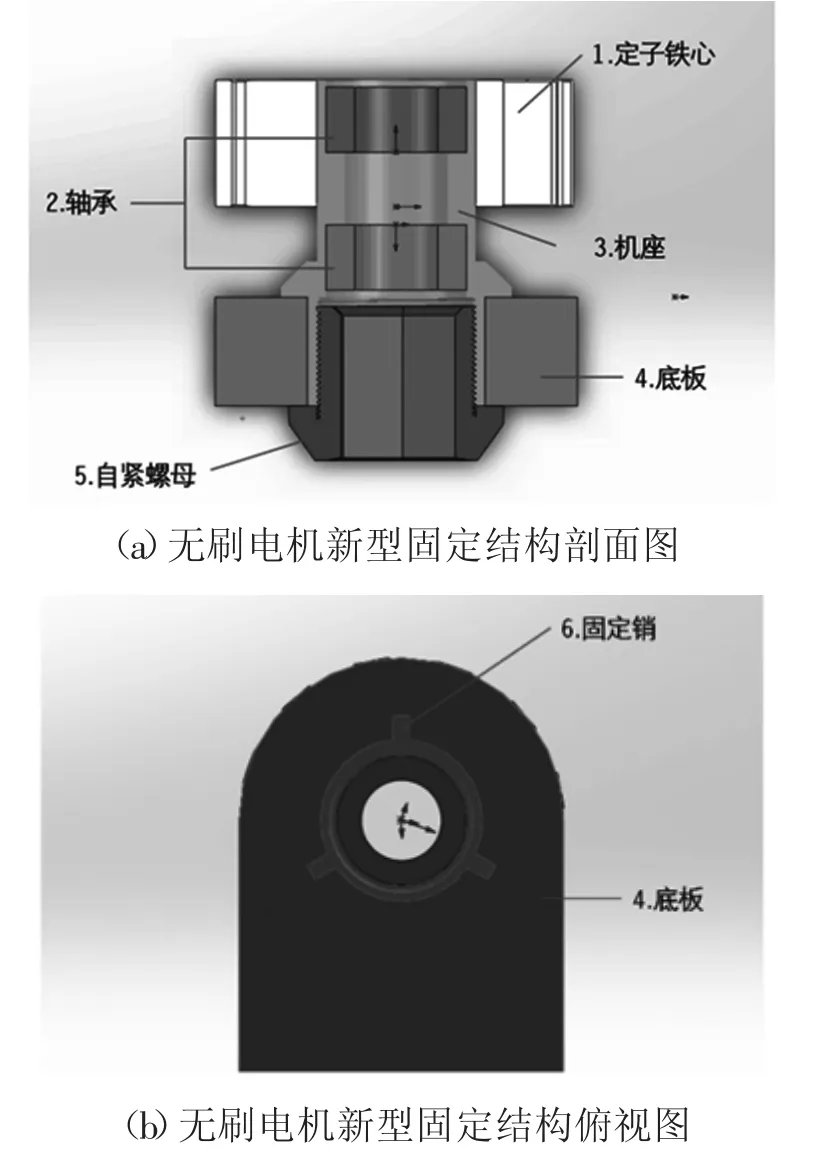
图3 机座与固定底座设计
通过调整电机尺寸参数,调整低阶固有振动频率,规避主要激振力波,有效抑制谐振。微型电机结构紧凑加工,提升频率需增加刚性材料,不同种类金属焊接会降低结构强度,干扰定子绕组的绝缘,方案实施难度较大,不利于多旋翼无人机的减重需求和精准控制需求。目前已有利用切削工艺减低固有频率,去除机座顶部金属材料、调整机座结构以改变电机重心达到减振效果[7]。CNC镗铣床控制精度高,且对定子绕组的绝缘特性不会造成损害,加工简单适合大批量生产。
多旋翼微型电机的尺寸较小,采用单纯增加或去除材料的方法都会对电机的运行特性造成较大影响。不妨设计一种单组螺栓的固定装置,相较于四螺栓固定底座,单组螺栓的设计便于固定结构的整体拆装,也可有效避免由装配不齐整造成的电机运转偏心和共振的产生,提升无刷电机的高速运行稳定度。
固定装置中,机座采用7000系铝合金一体加工成型,在兼顾减重和安全的同时支撑起定子铁心;机座与转子间采用双轴承设计,使用高阻尼低噪声的滑动轴承,提升电机的动平衡性能和主磁场稳定;固定销与底板的装配采用软性材料填充,吸收冗杂机械能,有效抑制机械振动和噪声。
当外转子螺杆嵌入定子底部时,与机座同轴的自紧螺母与螺杆啮合,无刷电机的底板装配完成,单组螺栓收敛机械能的横向传导路径,传动机构的减少更有利于固定装置机械性能的改善,减少振动对机身的磨损,增强无人机飞行时的水平稳定性,对提升多旋翼无人机的巡航条件起到重要的作用。
3 实验结果与分析
试验样机选用T-Motor公司生产的2207 V2.0无刷电机,扁平Φ28.1 mm,带霍尔传感器;查阅相关使用手册,选用T5143型螺旋桨与无刷电机装配,原装结构的电机运行参数见表1。

表1 原装电机飞行实验参数
将该型号的电机定子换装新型减振固定底座,外转子壳体保持原装,将改装新型减振结构的电机装配在同种型号的无人机机身,保持实验环境变量恒定,通过PID控制器驱动电机做模拟放飞实验,如图4所示调试信号形成闭环控制;通过传感器将改装前后的运行参数做实时采集,传输至上位机进行分析。

图4 PID闭环控制系统
数据分析可知,换装减振结构的电机在拉力、提速时间、稳定转速等指标无明显变化。通过控制器调节PID参数,对原装和改装电机分别从油门点50%到100%进行测试,2款电机的功率数据对比结果如图5所示,同级转速输出时,换装减振加固结构的电机功耗降低,当达到稳定运行转速26 700 r/min时,原装电机功率为496.24 W,改装电机功率为482.87 W,功耗优化可达2.69%。模拟放飞实验结果表明,通过定子结构改进,电机的电磁方案得到有效改善,电机高速运行时气隙磁场产生的径向电磁力波减少,电机具有低功耗起动特性,有利于无人机续航时间的提升。

图5 功耗优化对比图
电机运行功耗的降低可有效缓解电磁振动现象。无人机空载时,通过飞控系统给电机发送100%供电指令,当转速升至恒定,通过位移传感器实时采集数据。随着转速升高,机械振动量大幅增加,原装固定机构在100%供电时,定子和轴承产生的机械振动通过机座传导至机身,多旋翼无人机的横向最大振幅约为1.26 mm;换装减振结构的电机进一步减少机械振动,数据显示无人机最大振幅为0.93 mm,换装该种减振固定底座的多旋翼无人机横向振动量削弱26.19%,达到削弱机械振动的目标,可以预见电机的运行稳定度将有效提高。
4 结论
电机振动受多重因素影响,当无人机所处运行大气条件稳定时,工程实践往往还需要考虑电磁振动和机械振动带来的影响[10]。模拟实验的结果表明,通过调整无刷电机的定子结构,优化齿轭参数比,可以减少气隙磁场产生的电磁振动,并降低无人机的飞行功耗;另一方面,通过优化机座加工工艺和材料选型,也能降低机械振动的传导,有效缓解无人机的电机振动情况,有利于高性能、特种装备领域无人机的开发,提升微型无人机的动态性能。在电机领域的研究中,电磁振动的成因较为复杂,随着电机功率密度提升、柔性材料广泛运用,定子和机座等结构的工艺改善可以调整电机固有频率,削弱电磁振动;减少传动机构数量以缓冲机械振动,采用一体化结构设计,提升无人机飞行的稳定与可操控性能。本文通过介绍一种电机减振固定结构,基本实现对多旋翼无人机的电机振动分析与处理。
